
在低风险认知状态下,驾驶员的注意力主要集中在前方区域和后视镜上,注视和扫视频率较低,注视点在各区域间循环转移,扫视路径呈现出明显的规律性,如图11所示。
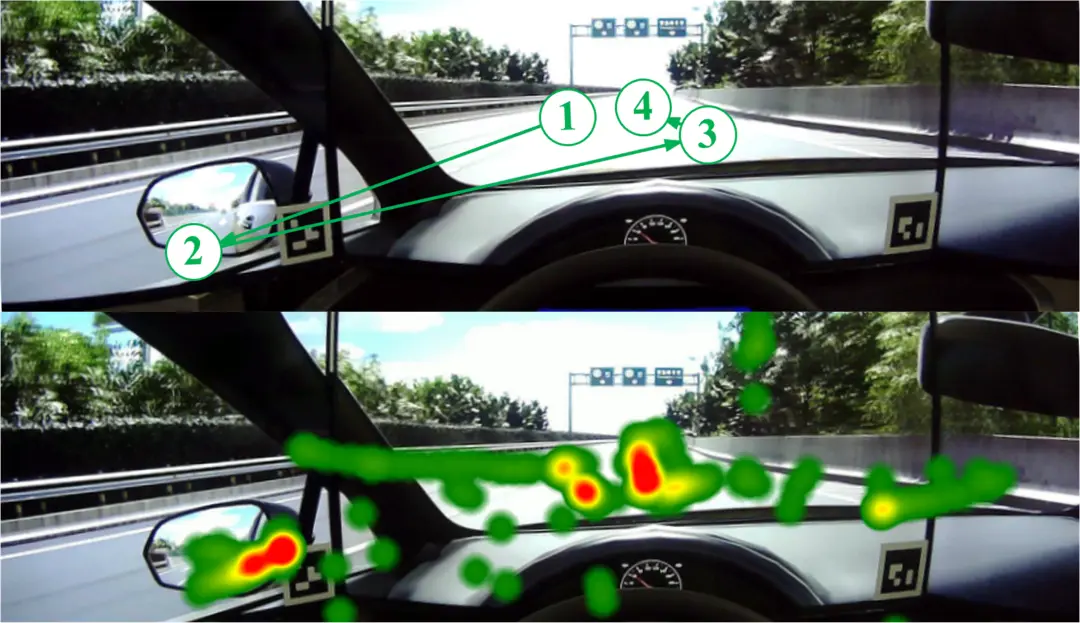
图11 眼动轨迹与热点图(低风险认知状态)
在高风险认知状态下,驾驶员往往倾向于将注意力集中在与自车交互的周围车辆上。对应有更高的注视和扫视频率,并呈现出重复注视和来回扫视的特点,如图12所示。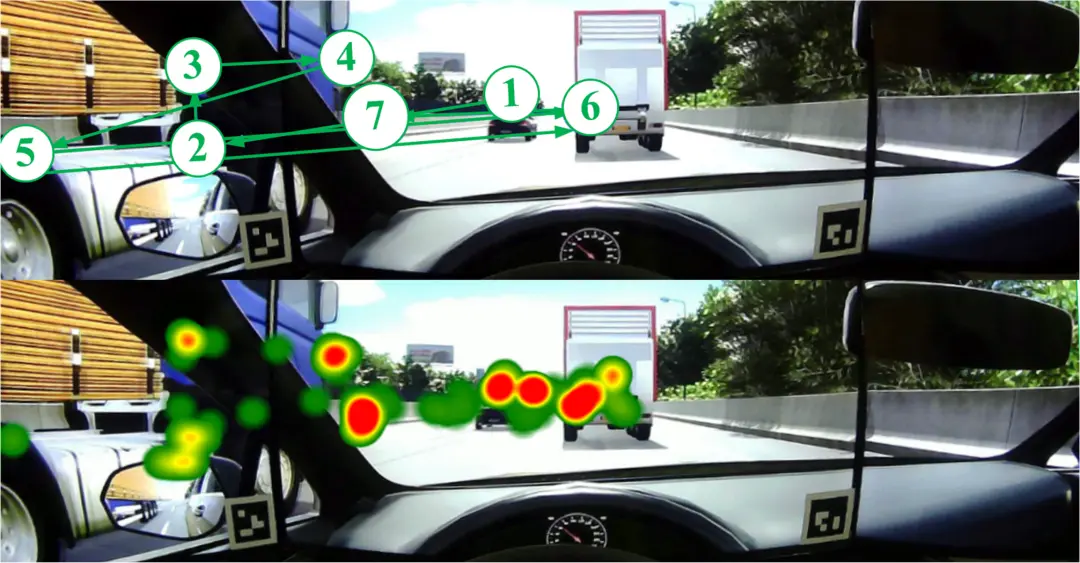
图12 眼动轨迹与热点图(高风险认知状态)
5、总结与展望
针对驾驶数据集缺少与人类认知相关信息的问题,研究采用驾驶模拟器实验的方法构建RISEE数据集,提供自然驾驶场景、人类主观风险认知及眼动等数据。
对场景主客观行驶风险及眼动特征的分析表明,RISEE数据集涵盖各种交互类型的数据,在决策规划系统的研发和测试中具有潜在的应用价值。具体应用包括:
基于风险认知的决策规划:行驶过程中,驾驶员通过视觉感知周围环境,并在评估各类环境信息后形成认知风险。因此,眼动数据可用于识别影响人类风险认知的关键环境因素,揭示风险认知的内在规律,从而帮助决策规划系统发出与人类认知相协调的决策指令。智能驾驶舒适性评估:在高等级智能驾驶汽车中,驾驶员角色发生了变化,对舒适性的评价也不再局限于车辆本身,而是会受到认知风险的影响[1]。因此,可以基于RISEE探究眼动信息与驾驶员主观认知风险之间的关系,评估高等级智能驾驶的舒适性。
参考文献:
[1] Meng H, Zhao X, Chen J, et al. Study on physiological representation of passenger cognitive comfort: An example with overtaking scenarios[J]. Transportation research part F: traffic psychology and behaviour, 2024, 102: 241-259.
[2] Bao N, Carballo A, Tsukada M, et al. Personalized causal factor generalization for subjective risky scene understanding with vision transformer[C]//2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2023: 4637-4643.
[3] You S, Luo X, Liang X, et al. A Comprehensive LLM-powered framework for Driving Intelligence evaluation[J]. arXiv preprint arXiv:2503.05164, 2025.
[4] He X, Stapel J, Wang M, et al. Modelling perceived risk and trust in driving automation reacting to merging and braking vehicles[J]. Transportation research part F: traffic psychology and behaviour, 2022, 86: 178-195.
[5] Ke Z, Jiang Y, Wang Y, et al. D2E: An Autonomous Decision-Making Dataset involving Driver States and Human evaluation of Driving Behavior[C]//2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2024: 2294-2301.
[6] Vlakveld W P. A comparative study of two desktop hazard perception tasks suitable for mass testing in which scores are not based on response latencies[J]. Transportation research part F: traffic psychology and behaviour, 2014, 22: 218-231.
[7] Charlton S G, Starkey N J, Perrone J A, et al. What’s the risk? A comparison of actual and perceived driving risk[J]. Transportation research part F: traffic psychology and Behaviour, 2014, 25: 50-64.
[8] Wu X, Xing X, Chen J, et al. Risk assessment method for driving scenarios of autonomous vehicles based on drivable area[C]//2022 IEEE 25th international conference on intelligent transportation systems (ITSC). IEEE, 2022: 2206-2213.
责编丨高炳钊
来源:同济智能汽车研究所













