作者 | 北湾南巷
出品 | 汽车电子与软件
随着城市车辆保有量的持续攀升,车位紧张、空间狭小成为普遍难题,传统人工泊车常因视野受限、空间压迫或环境复杂而困难重重,尤其在地库、斜车位、窄车位等场景中更是挑战重重。为此,自动化、智能化泊车技术应运而生,其中遥控泊车系统(RPA, Remote Parking Assist)以其“人在车外、车自动泊”的便捷体验,成为智能驾驶技术的重要应用之一。
遥控泊车功能使驾驶员无需坐在车内,即可通过手机App或钥匙在车外控制车辆泊入泊出,大幅提升泊车便利性、安全性和尊贵体验,正逐步走向量产普及阶段。
01、遥控泊车系统介绍
遥控泊车功能(Remote Parking Assist,简称RPA)是一种高级驾驶辅助功能(ADAS),允许用户在车外通过遥控钥匙或智能手机App,控制车辆自动完成泊车入位或驶离车位的操作。该功能特别适用于空间狭窄、驾驶员上下车受限的场景,提高停车便捷性与安全性。
1.1 关键系统组成
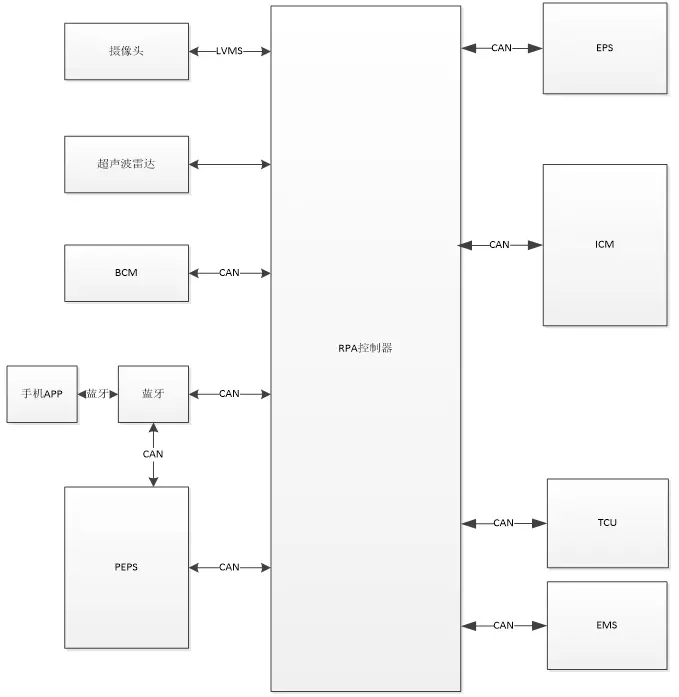
RPA系统由三大模块组成:传感与控制输入模块、RPA控制器、车辆执行与反馈模块:
传感输入端:侧重环境感知、安全状态判定,信息主要通过CAN总线传入RPA控制器;
超声波雷达:用于近距离障碍物探测;
环视摄像头:实现360°可视泊车环境;
毫米波雷达/激光雷达(部分高阶车型):增强空间感知精度;
IMU(惯性测量单元):用于判断车身姿态、转向动态。
RPA控制器:核心计算与决策中心,融合感知、决策、人机交互、通信、控制等功能。
自动泊车算法模块;
路径规划与轨迹跟踪模块;
控制指令下发至转向、制动、电机、换挡等执行器。
执行反馈端:完成实际控制动作并回传执行状态,确保系统闭环与安全性;
电动助力转向(EPS)、电子驻车(EPB)、线控刹车/加速、线控换挡系统等;
实现对车辆低速精准控制。
模块分区
功能模块
主要功能
通信方式
补充说明
传感与控制输入模块
摄像头(VMS)
提供视频输入用于泊车辅助(如环视、倒车、建图)
VMS或LVDS
视频数据被用于识别车位、障碍物、泊车线等环境要素
超声波雷达
探测近距离障碍物(典型探测范围 0.2~4m)
直接接入RPA或通过BCM转发(CAN)
通常布置在车头/尾保险杠,实时反馈距离信息
BCM(车身控制模块)
管理车门状态、灯光、电源、尾门等信息
CAN总线
提供如“门是否关闭”、“制动灯是否打开”等关键信息
手机App
用户通过图形界面远程操作泊车
蓝牙→CAN
启动、暂停、退出、一键召唤等功能由App触发
蓝牙模块
手机与车载系统通信中介
蓝牙协议→CAN转发
保证用户在10~20米内可控,并进行用户身份认证
钥匙(Key Fob)
启用RPA功能(通常通过特定按键或连续操作)
LF(125kHz)+RF(315/433MHz)+与BCM/PEPS通信(CAN)
利用现有车钥匙系统进行简化集成
PEPS(无钥匙进入系统)
判断用户是否靠近车辆,确保安全启用RPA
CAN总线
防止远程操作被恶意激活,常用于驾驶员确认
中央控制模块
RPA控制器
系统核心控制单元,执行泊车路径规划、状态管理与故障检测
多通道CAN总线 + 蓝牙转发
融合摄像头、雷达等传感器信息;决策并控制EPS、TCU、EMS等执行器与APP、钥匙等交互界面联动;需支持高实时性与冗余安全机制
执行与反馈模块
EPS(电动助力转向)
执行转向动作,反馈方向盘转角与状态信息
CAN总线
必须支持电子控制接口与故障诊断机制
TCU(变速器控制模块)
控制换挡(D/R/P等),实现前进、后退等泊车动作
CAN总线
自动变速箱需支持“电子挡”接口
EMS(发动机管理系统) / VCU(新能源)
控制车辆动力输出(加速、减速、怠速等)
CAN总线
新能源车型通常由VCU或MCU代替EMS
ICM(仪表模块)
向用户反馈泊车进度与系统状态
CAN总线
显示“泊车中”、“暂停”、“障碍预警”等信息
通信协议以CAN总线为主,部分摄像头使用LVDS(或VMS),实现高速图像数据传输:
模块间通信
协议
数据方向
功能说明
摄像头→ RPA控制器
VMS/LVDS
单向
视频图像数据
超声波雷达↔ RPA控制器
模拟/数字
双向
距离检测与触发反馈
BCM ↔ RPA控制器
CAN
双向
车身状态交互
蓝牙模块→ RPA控制器
串口/CAN
单向
用户控制命令
PEPS ↔ RPA控制器
CAN
双向
用户靠近认证信息
RPA控制器 → EPS
CAN
单向
转向控制
RPA控制器 ↔ ICM
CAN
双向
信息显示
RPA控制器 → TCU
CAN
单向
挡位控制
RPA控制器 → EMS
CAN
单向
驱动力控制
1.2 遥控泊车控制方式
遥控泊车系统核心特性之一是用户可在车外通过远程终端控制车辆自动泊入车位,遥控泊车系统(Remote Parking Assist,RPA)通常支持两种主流的控制终端:遥控钥匙(Key Fob)和手机APP。两者分别基于不同的通信机制,与整车系统实现指令交互:
1. 遥控钥匙控制方式
遥控钥匙主要通过现有的车载低频(LF)和射频(RF)通道与整车进行通信,具体包括:
LF(Low Frequency)通信:工作频率一般为125kHz,用于实现车辆近场定位和钥匙识别唤醒功能。
RF(Radio Frequency)通信:常见频率为315MHz或433MHz,用于发送远程控制指令,如启动遥控泊车流程。
具备专用遥控泊车按钮,用户需在车辆周围(通常10米内)按住按钮持续控制;
支持启动车辆并执行前进/后退、微调方向、自动泊车操作;
常见于奔驰、宝马等高端车型中,遥控信号稳定性强。

该方案无需增加额外通信通道或硬件,具备集成度高、响应快速、功耗低等优点,适用于传统车辆电子架构。但由于功能受限,通常仅支持基本的泊车启动、暂停、退出等操作,缺乏可视化反馈与高级控制逻辑扩展能力。
2. 手机APP控制方式
手机APP作为更灵活、智能的遥控终端,正逐渐成为遥控泊车系统的主流控制方案。APP可通过以下三种通信方式与车载系统连接:
通过蓝牙或4G/5G车载通信模块连接车辆;
可实时显示车辆泊车路径、状态信息;
支持触控滑动或虚拟按键操作,部分车型支持语音控制;
用户需保持与车辆的蓝牙连接或网络通信畅通。
蓝牙(Bluetooth):目前最常见的短距离通信方式,通常控制距离为10~30米。手机与车载蓝牙模块配对后,能够低延迟地发送泊车指令,具有功耗低、连接稳定、部署成本低等优点;
Wi-Fi直连:适用于需要更高带宽传输的场景,如视频画面反馈或地图渲染。车端需支持创建专属AP(Access Point)模式,与APP建立一对一的数据链路。
4G/5G蜂窝通信:实现真正意义上的远程泊车控制(Remote Valet Parking),用户可在远离车辆的情况下完成泊车。该方式通常应用于高级别自动驾驶系统,需配套T-BOX、云端服务与安全验证体系,但也面临通信延迟、网络覆盖与数据安全等挑战。
通过手机APP遥控,用户可在界面中实现包括泊车路径显示、障碍物预警、泊车模式选择、一键召唤、车位记忆与自动回退等功能,显著提升交互体验与系统智能化水平。同时,APP平台支持OTA在线更新,便于后续功能扩展与持续优化。
类别
细分类型
控制方式
通信协议
/ 技术
优点
限制
典型配套硬件要求
遥控钥匙(Key Fob)
按键式遥控
通过特定按键组合
LF(125kHz):近场感应/定位
复用已有车钥匙系统,无需新增硬件
控制方式简单
集成LF/RF通信模块的钥匙
连续点击触发泊车动作
RF(315/433MHz):发送控制指令
成本低、功耗低
缺乏可视化反馈
与车端接收器配对
响应快,集成简单
操作逻辑不可扩展
基本CAN通信能力连接RPA控制器
手机APP遥控
蓝牙控制(主流)
手机界面操控泊车
Bluetooth(2.4GHz)
低延迟、稳定连接、低功耗
控制距离受限
车载蓝牙模块
启动、暂停、退出等操作
适合10~30m短距控制
需手机蓝牙持续运行
蓝牙安全认证模块(防劫持)
配对方便
高可靠CAN总线连接RPA控制器
Wi-Fi直连
手机APP与车辆通过Wi-Fi AP直连
Wi-Fi(专属热点)
高带宽传输
需车辆支持Wi-Fi AP模式
车载Wi-Fi模块
可实现视频流反馈/更复杂图形界面
能耗较高
软件配套热点创建
Wi-Fi认证与数据加密机制
4G/5G远程控制
通过APP连接云端服务器,实现远程泊车与召唤(Remote Valet Parking)
移动通信:4G/5G
实现远程泊车(如提前将车停至目标区域)
延迟较高
车载T-BOX模块(含4G/5G通信能力)
支持远程召唤
通信安全机制要求高
云端认证服务
网络依赖严重
OTA升级能力
云端调度平台
RPA系统不仅提升智能化体验,更在实际使用中带来显著便利,具体优点如下:
应用场景
场景背景说明
RPA具体作用与技术价值
适用意义与典型场景
避免上下车困难
停车位狭窄、两车贴近或贴墙停车,车门难以完全打开,导致上下车不便,尤对老年人、孕妇尤为不便
驾驶员可在车外通过遥控完成泊车操作,避免钻入狭小空间
商场地下车库、老旧小区车位、立体停车场等极限空间
降低对驾驶技术的要求
提升通勤效率
避免上下车时撞到车门
传统方式下,开门可能碰到邻车或墙体,造成车门划伤、碰撞
驾驶员在宽敞区域下车后远程泊车
紧凑型城市车位、购物中心车场、贴墙车位
完全避免车门撞击邻车或墙壁
有效保护车门、车漆
更有效地利用停车空间
常规泊车为方便开门需预留至少50cm,浪费空间
RPA泊车无需预留上下车空间,可将车间距压缩至15~20cm
高密度写字楼车库、共享停车平台、智能商业车场
系统智能规划路径,实现高密度泊车
自动泊车算法优化空间分布
降低泊车剐蹭风险
新手司机因视野盲区、操作不当等原因,容易发生剐蹭
依托超声波雷达与摄像头实现360°环境感知
驾驶新手、高端车辆用户、狭窄泊车环境
自动路径规划、精准转向与进退控制
降低人为判断失误,保障车身安全
提升车辆高端感与智能体验
智能化控制技术已成为车企差异化竞争的重要卖点
展示整车智能控制能力,增强科技形象
中高端品牌车型、科技属性突出车型、吸引追求智能体验的年轻消费群体
支持销售端主动演示,提升客户体验与认可度
打造品牌高端化标签
#02
2.1 状态机介绍
如图展示了遥控泊车系统(RPA,Remote Parking Assist)的状态机模型(State Machine Model),具体描述了系统在不同状态之间如何转换,以实现完整的遥控泊车过程。
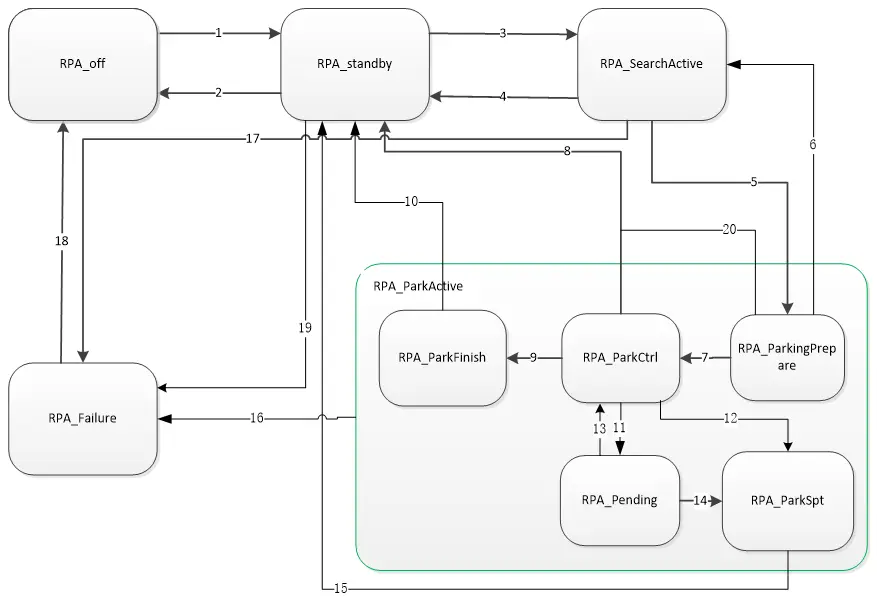
该状态机主要包括以下五个主状态:
RPA_off(关闭状态)
RPA_standby(待命状态)
RPA_SearchActive(搜索泊车位状态)
RPA_ParkActive(泊车活动状态,包含子状态)
RPA_Failure(故障状态)
状态名称
状态含义
触发条件 / 入口
执行内容 / 行为
下一状态路径
备注说明
RPA_off
系统未激活遥控泊车功能,功能完全关闭。
初始上电状态;用户未点击激活遥控泊车功能;泊车完成返回。
无功能运行,仅监听用户激活操作。
RPA_standby(激活)
默认初始状态;待用户主动开启。
(功能关闭)
RPA_standby
系统已激活遥控泊车功能但未进入搜索状态,等待用户操作或车位感知条件满足。
用户开启遥控泊车功能后进入;泊车完成后返回待命。
维持系统准备状态,检测传感器数据、准备感知模块。
RPA_SearchActive(用户发起搜索)
可反复进入;响应用户行为进行控制转移。
(待命)
或 RPA_off(关闭)
RPA_SearchActive
系统通过传感器(超声波、环视等)主动寻找可用车位。
用户在待命状态下操作“开始搜索”;满足感知条件。
启动环境建图、空间感知、空位识别算法。
成功后转 RPA_ParkingPrepare
需结合高精地图或标记区划线增强识别准确性。
(搜索车位)
失败可回 RPA_standby / RPA_off
RPA_ParkActive
进入泊车阶段,包含若干子状态。
已确认目标车位、搜索成功后进入。
管理泊车全过程,包括路径规划、执行器控制、泊车执行、完成退出等。
包含五个子状态,依次递进
详见子状态表;核心阶段。
(泊车活动)
RPA_Failure
任意状态中发生不可恢复错误,系统进入失败保护模式。
传感器故障、通信中断、电控异常、路径不可执行等
- 停止所有泊车控制
用户干预(如重启系统)
需支持故障记录上传、OTA诊断功能
(故障状态)
- 通知用户故障类型
服务维修支持
- 设置诊断码
其中RPA_ParkActive包含五个子状态,用绿色边框包裹:
RPA_ParkingPrepare(泊车准备)
RPA_ParkSpt(泊车支持)
RPA_ParkCtrl(泊车控制)
RPA_Pending(暂停状态)
RPA_ParkFinish(泊车完成)
子状态名称
状态含义
触发条件 / 前置状态
主要功能 / 动作
下一状态路径
说明
RPA_ParkingPrepare
已锁定目标车位,进行泊车前准备(如路径规划)。
来自 RPA_SearchActive 成功识别车位
- 建立泊车路径
→ RPA_ParkSpt(准备完成)
需要一定静止时间,计算路径与检测初始状态。
(泊车准备)
- 校准车辆姿态与环境坐标
→ RPA_Failure(失败)
- 初始化控制参数
RPA_ParkSpt
检查泊车执行所需支持条件是否具备。
RPA_ParkingPrepare 完成后进入
- 检查 EPS、电机、VCU、雷达状态
→ RPA_ParkCtrl(支持就绪)
类似软硬件自检步骤,确保安全执行。
(泊车支持)
- 初始化控制器协调机制
→ RPA_Failure(组件异常)
RPA_ParkCtrl
泊车执行的主控状态,车辆沿规划路径行驶。
RPA_ParkSpt 完成支持检测
- 实时控制车辆移动(加减速、转向)
→ RPA_ParkFinish(完成)
系统主控制环节;用户可中断。
(泊车控制)
- 动态避障与路径修正
→ RPA_Pending(中断)
- 状态反馈与持续执行
→ RPA_Failure(故障)
RPA_Pending
中途中断或通信异常暂时挂起泊车流程。
用户主动中止、遥控信号中断、临时避障触发。
- 保持当前车辆姿态
→ RPA_ParkCtrl(恢复)
增强泊车鲁棒性与用户干预能力。
(暂停)
- 持续检测是否可恢复泊车
→ RPA_Failure(超时/异常)
- 等待重新激活或超时退出
RPA_ParkFinish
泊车成功完成,车辆进入驻车状态。
泊车路径执行完毕,目标位置到达。
- 挂入P挡
→ RPA_standby(保留激活)
可配置是否返回关闭状态或保持激活
(泊车完成)
- 拉起EPB
→ RPA_off(关闭)
- 停止控制器
- 提示用户“泊车完成”
状态转移说明
编号
转移描述
1
从 RPA_off → RPA_standby:用户激活遥控泊车功能。
2
从 RPA_standby → RPA_off:用户取消或关闭系统。
3
从 RPA_standby ↔ RPA_SearchActive:开始/结束搜索车位。
4
从 RPA_SearchActive → RPA_standby:未找到合适车位或用户取消。
5
从 RPA_ParkActive → RPA_Failure:泊车过程中出现故障。
6
从 RPA_Failure → RPA_off:用户重启系统或系统自恢复。
7
从 RPA_SearchActive → RPA_ParkActive.ParkingPrepare:找到泊车位后进入准备阶段。
8
从 RPA_standby → RPA_ParkActive.ParkingPrepare:已知泊车位,直接进入准备阶段。
9
从 RPA_ParkFinish → RPA_standby:泊车完成返回待命状态。
10
从 RPA_standby → RPA_ParkActive(泛指进入子状态)
11
从 RPA_ParkCtrl → RPA_Pending:发生暂停。
12
从 RPA_Pending → RPA_ParkCtrl:恢复控制。
13
RPA_ParkingPrepare → RPA_ParkSpt → RPA_ParkCtrl:泊车准备 → 支持 → 控制
14
从 RPA_ParkCtrl → RPA_ParkFinish:泊车成功完成。
15
RPA_ParkActive → RPA_standby:用户中断泊车或泊车结束。
16
任何状态 → RPA_Failure:通用故障跳转。
17
RPA_standby → RPA_off:系统退出待命。
18
RPA_off → RPA_Failure:初始启动即发生故障。
19
RPA_standby → RPA_ParkActive.ParkingPrepare:跳过搜索直接泊车。
20
RPA_SearchActive → RPA_ParkActive.ParkingPrepare:找到车位后启动泊车。
2.2 Typical Use Cases典型用例
遥控泊车使用场景通常如下:
在狭小地库或紧邻柱体的车位中,由于车门开启空间有限,驾驶员往往难以正常上下车。此时,遥控泊车功能可让用户在车外完成泊车操作,轻松应对空间受限的停车难题。

当车辆两侧被邻车紧贴停放时,开启车门容易发生刮蹭,既影响出行也可能损伤车漆。通过遥控泊车,车主可提前下车,再控制车辆完成泊入,避免车门与邻车接触,有效降低剐蹭风险。

在高端住宅区或写字楼地下车库等场所,遥控泊车不仅提升了泊车便利性,更展现出智能科技带来的尊贵感,让用户在日常用车中感受到更高品质的智能体验。

在自动取车或召唤车辆的场景下,用户可在指定位置一键唤车,车辆自动驶出车位前往用户所在位置,省去步行至车位的麻烦,进一步提升用车效率和便利性。

如下为典型用例介绍:
垂直遥控泊入
在垂直车位中,用户启用系统后确认目标车位,挂P挡、拉EPB后下车,在车外通过App或钥匙遥控指令完成泊入。适用于写字楼、住宅小区常见的正向停车位。
水平遥控泊入
水平(平行)车位泊入要求系统具备较强的轨迹规划与车位识别能力,流程同上,适用于城市道路沿线或狭小地库边侧车位。
斜车位遥控泊入
系统需识别不规则角度的车位并计算轨迹,应用较多于商场或复合式停车场。
遥控泊出(垂直/水平/斜)
当车辆被困于两车之间或车主难以进车时,RPA系统可在车外遥控指令下自动驶出车位,提升日常使用灵活性。
使用案例图例
使用案例描述

遥控进出:
遥控进出功能指驾驶员在车外通过手机App或钥匙遥控方式,控制车辆缓慢驶入或驶出狭窄车位,适用于传统泊车过程中车门无法顺利打开或人无法进出的情形。该功能是遥控泊车(RPA)系统中的重要子功能模块。

垂直遥控泊入:
垂直遥控泊入是指驾驶员在车内完成泊车准备动作后下车,通过手机App或钥匙遥控操作,控制车辆自动驶入垂直停车位的一种RPA(Remote Parking Assist)子功能,主要应用于空间狭窄、人无法在车内完成泊车的场景。
水平遥控泊入:
水平遥控泊入是指驾驶员在车内完成泊车系统初始化,用户确认系统识别的目标泊位后,挂入P挡,拉起 EPB(电子驻车),下车准备遥控泊入,通过手机App或钥匙等遥控终端控制车辆自动驶入路边水平停车位(Parallel Parking Slot)的一种RPA子功能,适用于车位空间有限、需要精确控制车身姿态的场景。

斜车位遥控泊入:
斜车位遥控泊入是指驾驶员在车内完成遥控泊车系统初始化后,确认所识别的车位,随后挂入 P挡,拉起 EPB,下车准备遥控控制,通过手机App或钥匙在车外控制车辆,自动泊入以一定角度设置的斜向停车位(例如45°或60°角斜车位),适用于特定商业、住宅或地下车库等斜向规划的场景。

水平遥控泊出:
水平遥控泊出是指车辆停放在路边水平车位时,用户在车外通过手机App或钥匙遥控车辆自动驶出车位,系统自动执行转向、换挡、加减速等操作,避让前后障碍物,实现安全、智能、无驾驶员的出库动作。
垂直遥控泊出:
垂直遥控泊出是指当车辆以垂直于通道方式停放在车位内(如地下车库、商场停车场)时,用户通过手机App或钥匙,在车外遥控车辆自动驶出车位,系统自主完成挂挡、转向、动力控制和避障,实现安全、高效、无人值守的出库操作。
斜车位遥控泊出:
斜车位遥控泊出是指当车辆以倾斜角度(如30°、45°或60°)停放在斜向车位中时,用户在车外通过手机App或钥匙远程控制车辆自动驶出车位,系统自动完成挡位控制、方向调整和避障操作,实现安全、精准的出库。
03总 结
遥控泊车作为智能驾驶的重要组成部分,正在改变用户泊车习惯,让泊车不再是令人头疼的技术活。它不仅提升了车辆使用的便利性,更代表着智能交通发展的关键一步。随着技术不断演进,未来RPA功能将在更多车型中实现普及,带来更安全、智能、便捷的泊车体验。
参 考:
1.Ford : Remote Park Assist เลื่อนรถเข้าช่องจอดง่ายๆ ได้ด้วยการกดปุ่ม - HeadLight Magazine
2.Remote Control Parking
3.The Volkswagen Touareg can now park itself without a driver on board - AutoBuzz.my
4.New remote parking features blocked in South Africa – even in your own driveway – MyBroadband
5.什么是遥控泊车_辅助/操控配置_配置详解_汽车百科_汽车之家
来源:汽车电子与软件













