汽车智能性测评前沿
——测评模式演进解读
· 前言 ·
中汽研汽车科技(上海)有限公司作为华东分中心的承载主体,积极投身于端到端技术、大模型技术等新兴技术领域的深度研究与大胆探索。精心布局端到端自动驾驶技术与大模型技术业务,广泛涵盖测试、咨询、产学研等多个维度,以创新引领行业发展潮流,为汽车产业的辉煌未来贡献力量。
01智能汽车测试技术的演进:从碰撞测试到自动驾驶测试
引言
本文旨在分析自动驾驶汽车测试技术的演进过程,探讨如何通过仿真测试、交通流仿真、硬件在环测试,整车在环测试和场地测试等方法解决传统碰撞测试的局限性。文章首先回顾了传统碰撞测试的历史与发展,指出了其在智能汽车时代的不足并详细介绍了自动驾驶测试技术的多种方法及其研究现状,包括仿真测试技术、交通流仿真技术、硬件在环测试技术和场地测试技术。最后,本文探讨了这些技术在实际应用中的优势与不足,并提出了未来研究的方向。通过本文的研究,我们希望为自动驾驶汽车测试技术的发展提供理论支持和实践指导,推动智能汽车技术的安全性和可靠性进一步提升。
传统碰撞测试
碰撞测试的历史可以追溯到20世纪中叶,当时汽车工业刚刚起步,安全问题成为关注的焦点。自1999年开始,中汽研就致力于实车碰撞试验,至今已有20余年,C-NCAP(中国新车评价规程)也成为当前国内汽车安全领域最主要的评价体系之一。最初的碰撞测试主要通过物理撞击来评估车辆的结构强度和乘员保护能力。随着时间的推移,碰撞测试逐渐发展为一套标准化的测试体系,包括正面碰撞、侧面碰撞、追尾碰撞等多种场景。这些测试为传统汽车的安全性提升提供了重要依据([1])。

图1 传统碰撞测试(图片来自网络)
然而,随着智能汽车的兴起,碰撞测试的局限性逐渐显现。智能汽车的核心在于其感知和决策能力,而这些能力无法通过简单的物理碰撞测试来评估。例如,近年来发展迅速的自动驾驶系统需要在复杂的交通环境中做出实时决策,而碰撞测试只能模拟少数几种固定的碰撞场景,无法覆盖智能汽车在实际驾驶中可能遇到的多样化场景。因此,传统的碰撞测试方法已无法全面满足智能汽车的安全性验证需求,急需引入新的测试技术和方法。
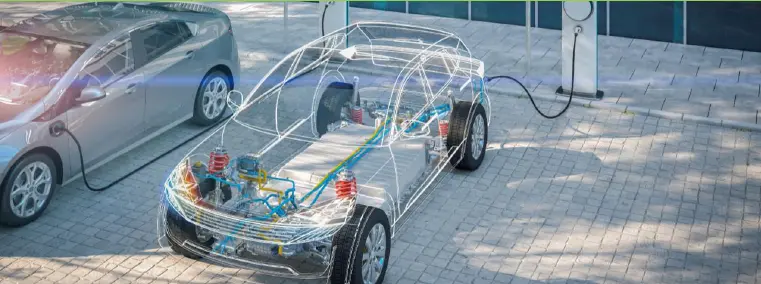
自动驾驶测试
自动驾驶汽车测试是自动驾驶研发中的重要环节,也是自动驾驶技术发展的重要支撑。自动驾驶测试贯穿车辆的整个生命周期,即使车辆已经上路行驶,也会通过定期远程升级来覆盖新的场景。随着智能网联汽车的高等级自动化和网联化系统不断产业化落地,对测试的依赖越来越深入。测试工作变得更加复杂和多样,需要覆盖从基础功能验证到高级自动驾驶行为的各个方面。测试不仅确保了车辆在各种条件下的性能和安全性,还帮助开发者收集数据,以便不断改进和优化自动驾驶算法。因此,自动驾驶测试不仅是验证技术可靠性的手段,更是推动智能汽车技术进步的关键驱动力([2])。自动驾驶汽车的测试伴随着车辆开发的全流程,包括对标测试、软件在环(SIL,即software-in-loop)、硬件在环(HIL,即hardware-in-loop)、车辆在环(VIL,即vehicle-in-loop),系统标定、再到最后的整车场地、道路测试等方法,涵盖了从零部件到系统再到整车的全链条验证。其主要验证目的在于进行系统的功能性、性能方面、安全性、稳定性和鲁棒性测试。
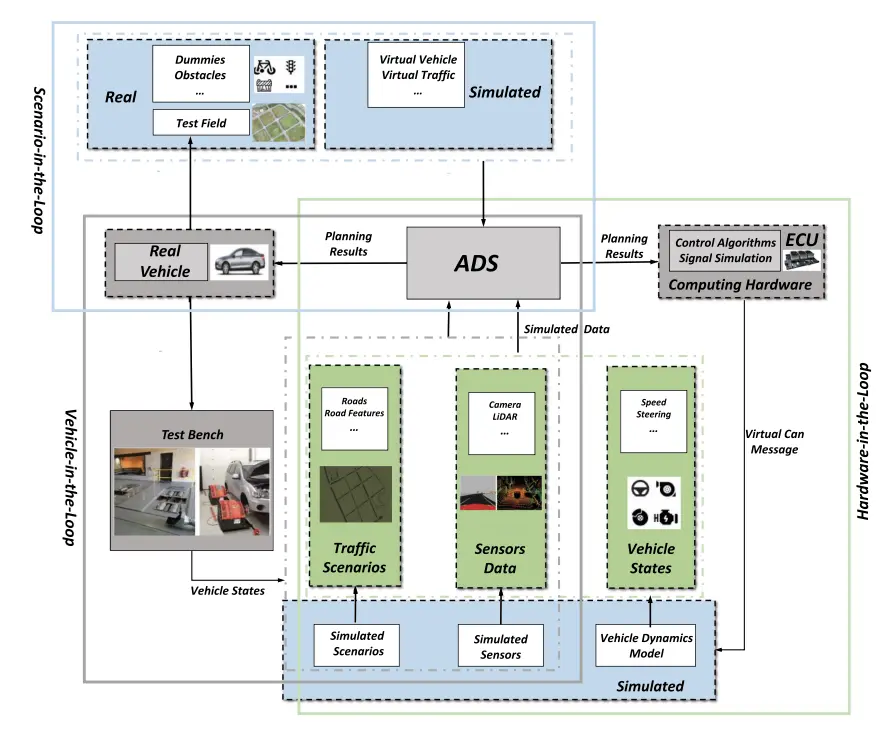
图2 自动驾驶测试中的SIL,HIL以及VIL测试(图片来自论文)
软件在环测试-场景仿真测试技术
由于自动驾驶所面对的场景近似无限且场景泛化困难,传统汽车测试领域经常采用的典型场景测试方法已无法满足自动驾驶的测试需求。研究表明,需要十亿公里以上的道路测试才能在统计学意义上证明自动驾驶比人类驾驶更安全([3])。如何通过仿真提高测试效率和降低测试成本已成为一个研究重点和热点。欧洲通过AdaptIVe和PEGASUS等项目逐渐完善了一套基于仿真测试、在环测试和道路测试的自动驾驶测试规程,联合国世界车辆法规协调论坛自动驾驶与网联车辆工作组在此基础上提出了多支柱的测试方法。仿真已成为自动驾驶设计、评价、许可与上路使用整个生命周期中最重要的测试手段之一。为了提高仿真场景的真实性和仿真测试的区分度,高等级自动驾驶测试对仿真的精度和保真度提出了更高的要求。需要针对高精度车辆动力学模型、拟人化测试背景车模型、高价值测试场景、高保真环境和传感器模型、云控平台等关键技术开展研究,以提高自动驾驶仿真测试的效果。

图3 基于Carla的仿真环境示意(图片来自网络)
软件在环测试-交通流仿真测试技术
自动驾驶交通流仿真测试的目的主要是对自动驾驶在演进交通环境下的安全和交通效能进行测试。随着高等级自动驾驶车辆(Highly Automated Vehicle,HAV)智能水平的不断提高,对于HAV的测试已从单一功能的独立测试变为多功能甚至整车集成的测试和安全性认证。大量自动驾驶厂家基于路采场景,构建测试场景库,对被测对象进行测试。然而,此类场景库无法覆盖HAV所需面对的全部交通场景,也无法满足HAV安全验证巨量里程测试需求。此外,基于场景库的回放测试是一种单向交互测试,背景车流无法对被测车辆的行为进行实时响应,会导致大量背景车主责的碰撞(如后车追尾等)。基于交通流仿真生成可实现真正的双向交互能力的背景交通流,已成为目前业界公认的重要解决方案。与冲突对象的交互博弈是HAV规划决策模块的难点,也是决定HAV安全性和智能水平的关键。若背景车流智能度不够,无法与测试主车 进行可信交互博弈,则测试结果可信度存疑。然而,纵观国内外用于HAV开发与虚拟测试的主流平台,现有的集成性开源仿真测试平台(如微软AirSim、英特尔CAPLA、百度Apollo等),均侧重于对传感器仿真、车辆动力学仿真与场景中各类物体的三维建模仿真。而对于交通测试场景的生成,大多仅支持背景车轨迹的离线导入,少部分(如VTD等)虽然提供了内置的交通流模块,但其生成的交通流不够真实, 缺乏高逼真度,不能够模拟车辆间双向交互,尤其是缺乏与测试主车交互的交通流环境。Waymo研发的Carcraft具备较强的交通流仿真能力,但由于技术封锁与商业机密因素,并未对外界开放([4])。
图4 Waymo的仿真结果示意,左侧为现实场景,右侧为生成场景(图片来自网络)
针对交通流环境缺失的问题,业界常用的解决方法是接入微观交通流仿真软件。在交通工程领域,交通流仿真软件通过虚拟化生成交通流环境,来模拟评价各种交通管控措施的预期效果。微观交通 流仿真软件重点关注车辆之间的真实交互过程,以车辆个体为对象,通过构建车辆驾驶行为模型,模拟车辆在不同道路和交通条件下的运动状态,因此,微观交通仿真模型中的单车也可作为自动驾驶测试的背景交通流,从而接入自动驾驶测试平台。
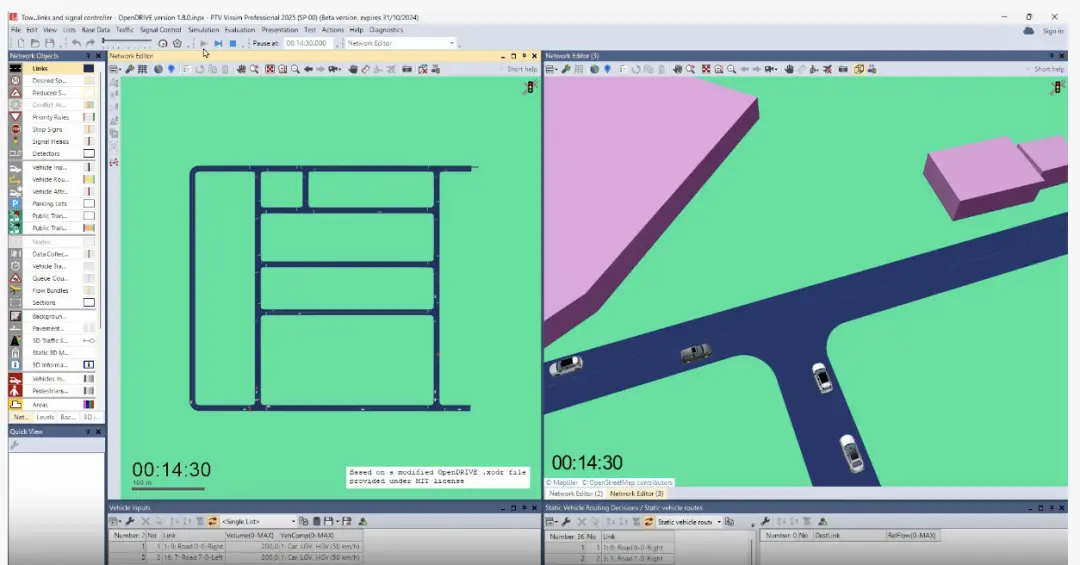
图5 特斯拉的FSD示意 (图像来自特斯拉官网)
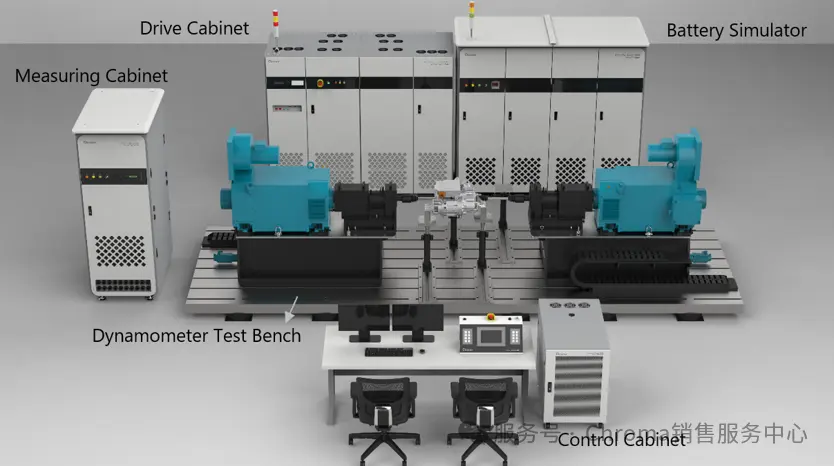
硬件在环测试技术
硬件在环仿真测试是自动驾驶测试与评价中承上启下的关键阶段,是面向自动驾驶车辆整车行为的综合性能测试,通过将虚拟仿真世界与物理世界中的自动驾驶车辆交互融合,得到准确且高效的测试效果。虚拟仿真场景是硬件在环测试的核心,交互性、实时性和真实性是硬件在环测试的立足点。
整车在环测试技术
作为一套结构复杂的物理信息系统,自动驾驶车辆深度融合了智能驾驶系统与汽车实体,充分地利用各个子系统(如传感器、定位、感知、决策、 规划、控制等)的功能特性,实现不同子系统间的高度耦合与紧密协作,并通过智能驾驶系统与汽车实体间相互关联的反馈回路,以安全、动态、实时的方式驱动车辆在交通环境中自主行驶。自动驾驶车辆行驶过程中的行为表现可直接反映所有子系统间的协作能力,即自动驾驶的综合能力。 极为复杂的工作机制使得自动驾驶车辆的行为表现具有较强的随机性和不可解释性,因此,仅测试各子系统的功能与性能并不足以全面地探知自动驾驶车辆的综合能力,也无法保证车辆的安全性与可靠性。还须在此基础上结合多维数字孪生测试平台对自动驾驶车辆进行整车级测试(即整车在环仿真测试),将其作为测试对象接入数字孪生测试平台,通过观察并分析其整体行为来对其综合能力进行测评。尽管多维数字孪生测试平台可以提供丰富而又逼真的测试用例和场景,但对于整车在环(Vehicle-in-the-Loop,VIL)仿真测试而言,行驶过程中车辆性能参数(如动力、阻力、燃油消耗、转弯半径、滑移率等)的变化也会影响智能驾驶系统的工作,进而影响测试结果,因此,为了提高测试结果的准确性与可靠性,还须为自动驾驶提供更加真实的物理工况,如道路工况(路面附着系数、坡度、曲率等)、光照、湿度和温度等。其中,光照、湿度、温度等参数主要影响车载传感器的相关性能,也会间接影响道路工况,如路面湿滑程度等。而道路工况则直接决定了自动驾驶车辆在测试过程中的行驶性能,因此,如何在测试过程中为自动驾驶提供真实的道路工况是VIL仿真测试需要解决的关键问题之一。
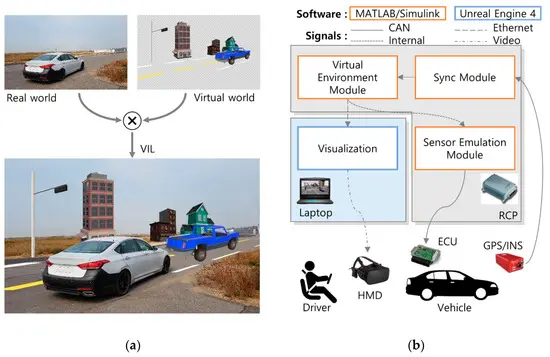
图6 整车在环示意(图片来自论文)
根据自动驾驶车辆行驶环境中道路工况的不 同,目前自动驾驶VIL仿真测试主要有2种方法,分别是基于封闭场地的整车在环测试方法和基于试验台的整车在环测试方法。2种测试方法都需要多维数字孪生测试系统提供丰富而逼真的虚拟测试场景,不同点在于前者令自动驾驶车辆行驶在一片封闭的空旷场地或封闭的园区内,为车辆提供最为真实的道路工况;而后者则令自动驾驶车辆行驶在一个室内试验台上,以车路耦合的方式为车辆模拟真实的道路工况,使车辆在试验台上行驶的效果与在真实道路上完全相同。虽然硬件在环仿真在自动驾驶车辆测试领域取得了一些进展,但目前的研究和技术仍难以满足高等级(L3级以上)自动驾驶车辆的测试需求,尤其在实时性和真实性两方面。
场地测试技术
自动驾驶场地测试主要包括封闭场地测试和开放道路测试,封闭场地测试可结合自身测试需求搭建测试场景,检测车辆系统的整体表现;开放道路测试可验证车辆在真实交通环境中的表现,但实际测试过程中由于开放测试道路周边环境的不确定性, 测试效率较低。
封闭场地测试是自动驾驶测试“三支柱”体系中必不可少的一环。截至目前,中国高校与企业已经开展了大批量的智能网联交通系统试验场建设。上海同济大学自动驾驶课题组以嘉定校区内嘉三路和李庄环路为基础,建立了面向智能网联车的硬件在环仿真平台([6])。
开放道路测试是自动驾驶测试的最后一轮测试,将完全真实的自动驾驶车辆与场景信息相结合,是自动驾驶量产上路前最后的测试环节。美国、欧洲、日本等开展相关方向的开展较早,有一定的积累,而中国虽然开始较晚,但国家的政策倾斜使得国内企业在技术研究方面的投入不断加大,相关技术也得到了快速发展。
02总结
尽管这些新型测试技术在自动驾驶汽车的研发和验证中发挥了重要作用,但它们仍面临诸多挑战,如测试成本高、周期长、覆盖度低以及缺乏完善的工具链。未来的研究需要进一步提高仿真场景的真实性和测试的区分度,开发更加智能的交通流仿真模型,提升硬件在环测试的实时性和真实性,并优化场地测试的效率和安全性。
未来的汽车测试将更加依赖于AI,以实现更高效、更安全、更经济的端到端自动驾驶测试。这将推动自动驾驶汽车更快地从实验室走向实际应用,最终实现完全自动化的交通系统。随着技术的不断进步和法规的逐步完善,自动驾驶测试将继续在确保自动驾驶安全性和可靠性方面发挥关键作用([7])。
来源:CATARC中汽科技上海