1. ACC 性能要求
2. ACC 车对车
3. ACC 车对摩托车
4. ACC 车对VRU
5. 道路特征
6. 自动起步
3.2 CMRm
在CMRm测试用例中,EMT以60km/h的速度行驶时,允许使用带有数据记录仪器的真实摩托车。
只有车辆制造商预测的ACC系统(减速度不超过5m/s²且AEB不干预)能完全避撞时,才能使用真实摩托车做目标车。
如果测试车辆VUT在TTC=3.0 s时没有启动ACC制动,则测试应安全中止,此时将使用EMT软目标重复测试。
3.3 CMRb
对于CMRb,测试以与CCRb相同的方式进行,但EMT位于25%的碰撞点。
CMRb 测试在直路上进行:
• VUT 车速:55 km/h
• 目标摩托车(EMT)车速:50 km/h
• ACC 设置为最近跟车距离• 碰撞位置:25 %测试开始后,目标摩托车以 −4 m/s² 的恒定减速度制动至 0 km/h。
3.4 切入
在切入试验中,相邻车道的EMT应向VUT的车道进行部分变道(2.5m横向偏移)。指示的TTC定义为EMT完成变道机动的时间点的TTC,其中EMT的后轮处于VUT的25%碰撞点。
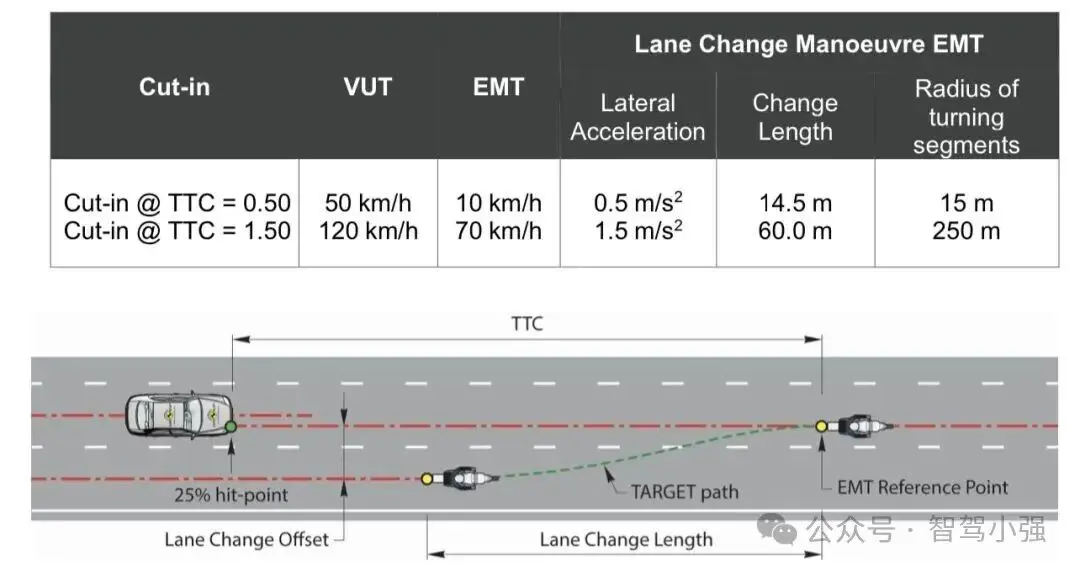
为了确保在不同的EMT平台上实现逼真的轨迹和足够的可重复性/再现性,在车道变换长度期间应满足以下EMT边界条件:
路径误差/横向偏差[m]: ± 0.15
航向/偏航角偏差 [°]: ±2.00
速度偏差[km/h]: ±0.50
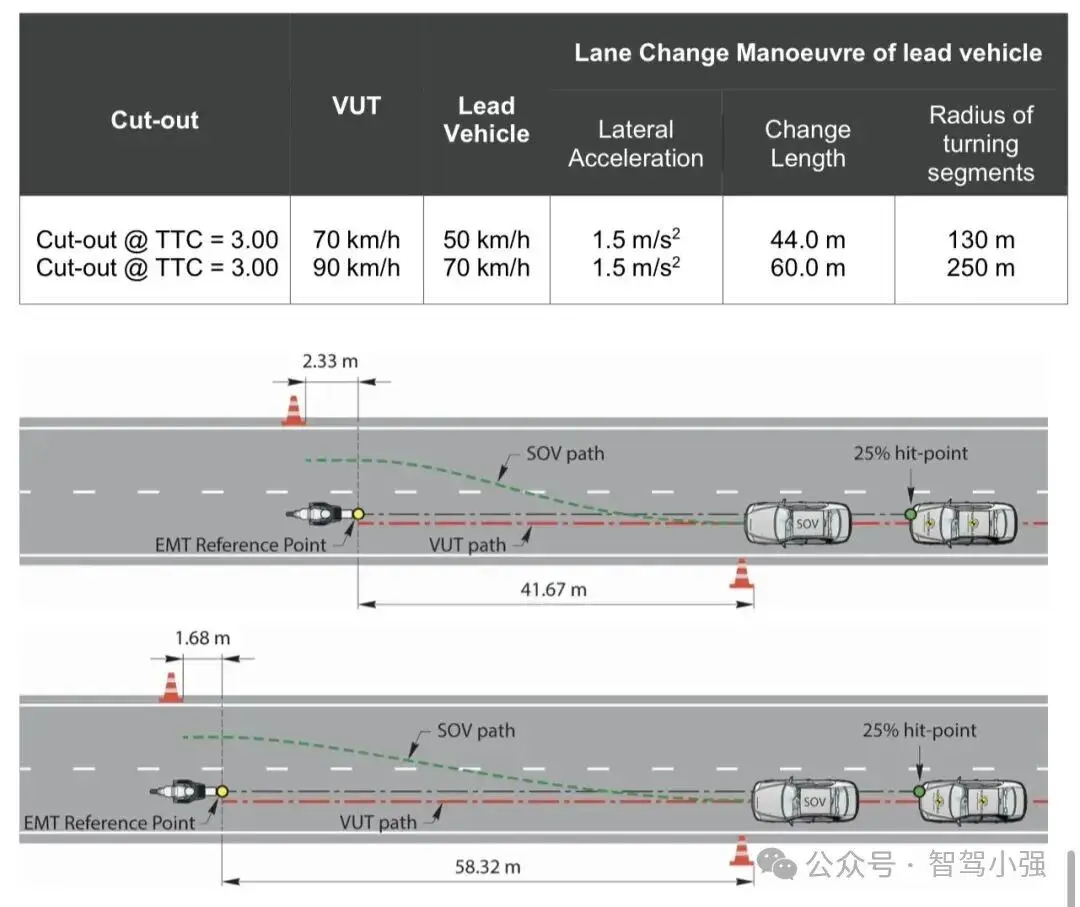
3.5 切出
切出测试应使用SOV进行。切出车辆(SOV)应向相邻车道进行全变道(3.5m横向偏移),以避开位于25%碰撞点的静止EMT。
• 以静止 EMT 后方标注距离作为变道开始点(41.67m、58.32m);• 以静止 EMT 前方标注距离作为变道结束点(2.33m、1.68m)。
下图指示的TTC定义为当SOV开始变道时SOV到EMT的TTC。
SOV在变道操纵期间不得使用转向灯。测试实验室可以放置不同切出路径的物理标记,这不会影响车辆性能。SOV路径偏差=[±0.2m]。
4. ACC 车对VRU
车对VRU2纵向2CPLA1CBLA1
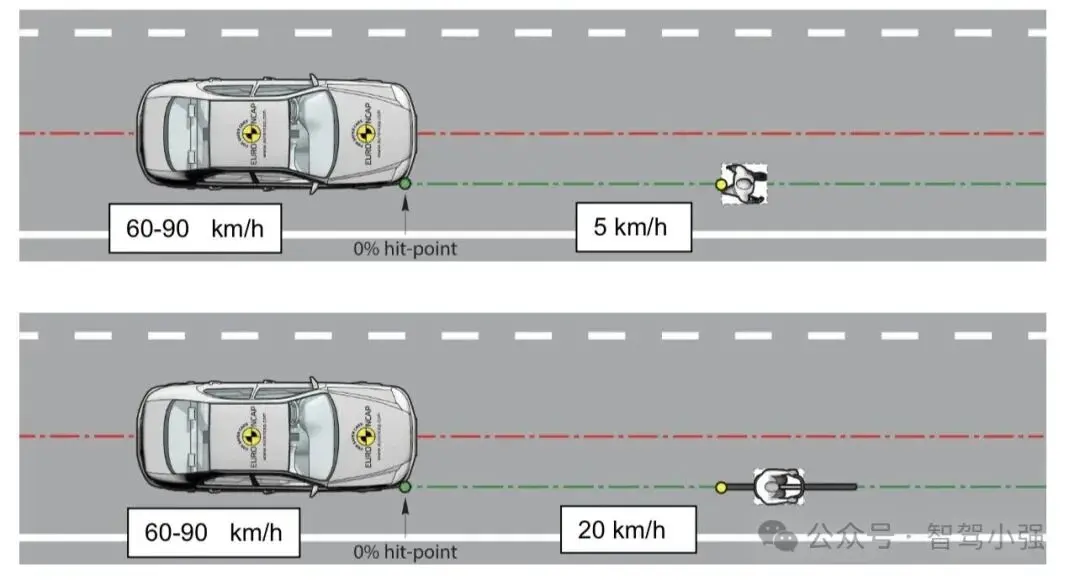
车对弱势道路使用者(Car-to-VRU)测试评估 ACC 对前方同向行驶的行人及骑行者的性能,碰撞位置设定为 0%。
CPLA-0(行人)与 CBLA-0(骑行者)的测试组合如下,步长为 10 km/h:
车对VRU场景VUT 速度目标物速度CPLA – 移动行人直道 碰撞位置0%60–90 km/h5 km/hCBLA – 移动骑行者直道 碰撞位置0%60–90 km/h20 km/h
评分规则:
• 每个场景及测试速度下,若 ACC 将碰撞速度降低超过 30 km/h,得 1 分。
• 若 ACC 介入并在 AEB 介入前将碰撞速度降低超过 15 km/h,得 0.5 分。• 若 ACC 未将碰撞速度降低超过 15 km/h,不得分。
一次有效的测试运行需满足:在 0 % 碰撞位置实现,且横向偏移精度为 +10 cm – 0 cm。
制造商可将 ACC 的提前减速策略与 DSM 检测到的瞬态和/或非瞬态驾驶员状态关联。
制造商可在实现 ≥15 km/h 的减速后,实施转向避让策略。(允许使用自动紧急转向AES过该场景,但是也要有至少15km/h的速度降)
5. 道路特征
道路特征所需行动得分弯道显示并调整车速,确保横向加速度不超过3.5+0.5m/s²。0.2环岛显示并开始减速,使得车辆在到达环形路口前25m处,车速降到50km/h或更低。0.2路口/没有路权显示&如果驾驶员没有反应,将车速降至30km/h及以下。0.2交通信号灯对于红灯:显示&如果驾驶员没有反应,将车速降至30km/h及以下。对于黄灯:显示&如果驾驶员没有反应,将车速将至30km/h或以下,不需要紧急制动,减速度不超过5m/s²。0.2停车标志显示&如果驾驶员没有反应,将车速降至30km/h及以下。0.2
道路特征响应功能无需默认开启。
为避免驾驶员过度依赖,Euro NCAP 建议:ACC 针对弯道、环岛及路口的速度自适应功能,仅在限速 ≥60 km/h 的道路上可用。同时假设交通信号灯与停车标志不会设置在限速 >80 km/h 的路段。
在默认 ACC 模式下,应激活道路特征响应功能,并通过实际道路驾驶进行验证,以确认 VUT 的响应与制造商声明一致。
6. 自动起步
本评估关注车辆在完全静止后恢复 ACC 的策略。 只有满足以下条件的 VUT 才能接受评估:
• 当前车停车时,车辆可在 ACC 控制下完全停稳;• 同时保持转向辅助功能。
ACC自动起步要求得分自动起步应满足以下所有要求:
外部传感器确认周围环境
驾驶员眼睛看路(未脱眼)1驾驶员输入仅在驾驶员确认后起步0.5
测试车辆开启ACC跟随GVT或其他替代车辆时,将领航前车减速至完全停止,避免剧烈减速。
6.1 使用传感器确认周围环境
在测试车辆跟停并保持5s停止后,在VUT和领航前车之间放置一个行人假人,领航前车起步离开后,确认VUT仍然停止。
确认后,应移除行人假人,VUT可以恢复驾驶。
6.2 眼睛看路(驾驶员未脱眼)
在测试车辆跟停并保持5s停止后,驾驶员将目光从前方道路移开,然后领航前车起步驶离,确认VUT仍然停止。

确认后,VUT只能在驾驶员恢复看前方道路视野的0.5 s内恢复驾驶。
来源:智驾小强













