孤立车辆状况
对每个模型单独进行测试时测量的力系数如图9所示。在所有横摆角度下,AeroSUV模型的阻力系数都比DrivAer模型高约20%,这主要是由于其方形后部结构和相对较大的车轮和轮舱。两个模型的阻力系数都随着横摆角度的增加而增加,AeroSUV模型的增加率在大约±10°之后逐渐减小,而DrivAer模型在测试的横摆角度范围内则显示出持续增加。与DrivAer模型相比,AeroSUV模型还表现出更大的侧向力系数,大约高出30%,这主要是由于方形后部形状的侧向面积相对于前部面积比DrivAer模型更大。两种模型的升力系数相似,但这种相似性是由于两个相互抵消的因素。尽管这里没有显示,AeroSUV的前轴升力更高,可能是由于其较大的前部车身导致流速增加,而DrivAer模型的后轴升力更高,可能是由于后车窗和甲板上的压力降低。
本文以离散表面压力系数(Cp)或与孤立条件的差值(ΔC P,iso,将在下一节讨论)的平面视图散点图的形式呈现了表面压力分析。图10和图11分别提供了Drivaer和AeroSUV模型的孤立车辆散点图。作为参考,图6和图7显示了每个模型上的点位置。在图10和图11中,显示了五个横摆角度的压力系数数据。左侧列显示Cp值,右侧列显示ΔCp,yaw0值,从0°横摆角度条件开始。这两个参数的尺度不同,符号大小表示参数的大小,颜色和阴影表示大小和符号(黄色表示正数,蓝色表示负数)。DrivAer和Aero-SUV模型的Cp和ΔCp,yaw0的趋势相似,两个模型的主要区别在于不同背面的压力测量点。AeroSUV数据显示,在其更大的基底上,Cp值较低,与DrivAer相比,导致AeroSUV在所有横摆角度下的CD值更高。在每个模型的前部和风挡板上,发现了唯一的正Cp值。随着横摆角度的增加,模型迎风侧面的Cp增加,背风侧面的Cp减少,导致在交叉风方向上产生侧向力,相对基底压力较低(-ΔCP,yaw0)导致阻力系数增加)。尽管难以区分图10和图11,但AeroSUV前表面(引擎盖和挡风玻璃)上的Cp值低于DrivAer,导致上述的前升力较低。DrivAer 后部下方升程较短,从其向上暴露的后表面上较低的Cp 处即可明显看出。
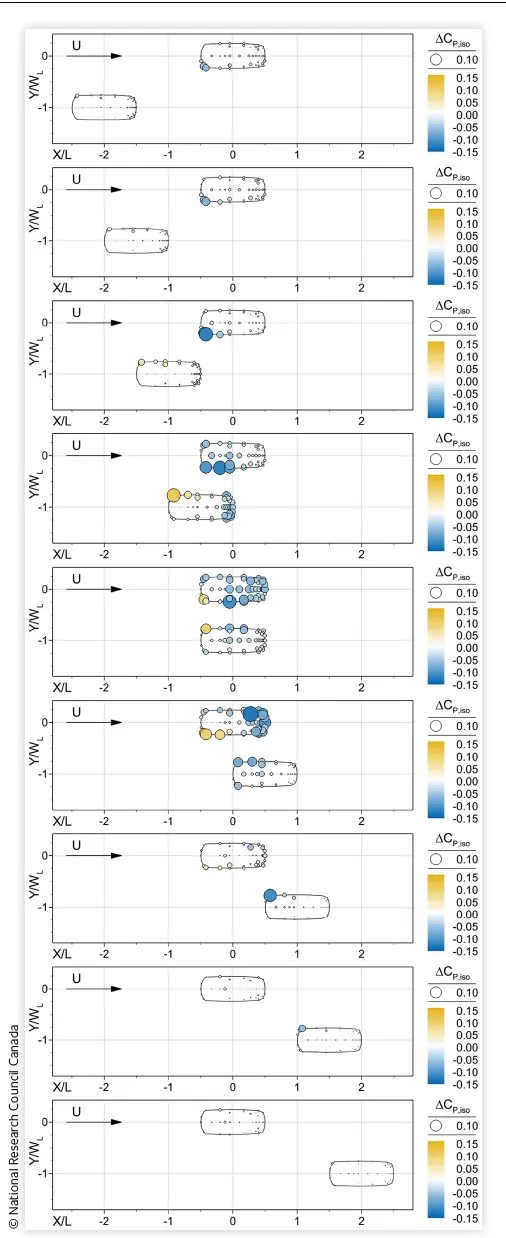
图 9 在孤立条件下,DrivAer 和 AeroSUV 模型的力系数随横摆角的变化
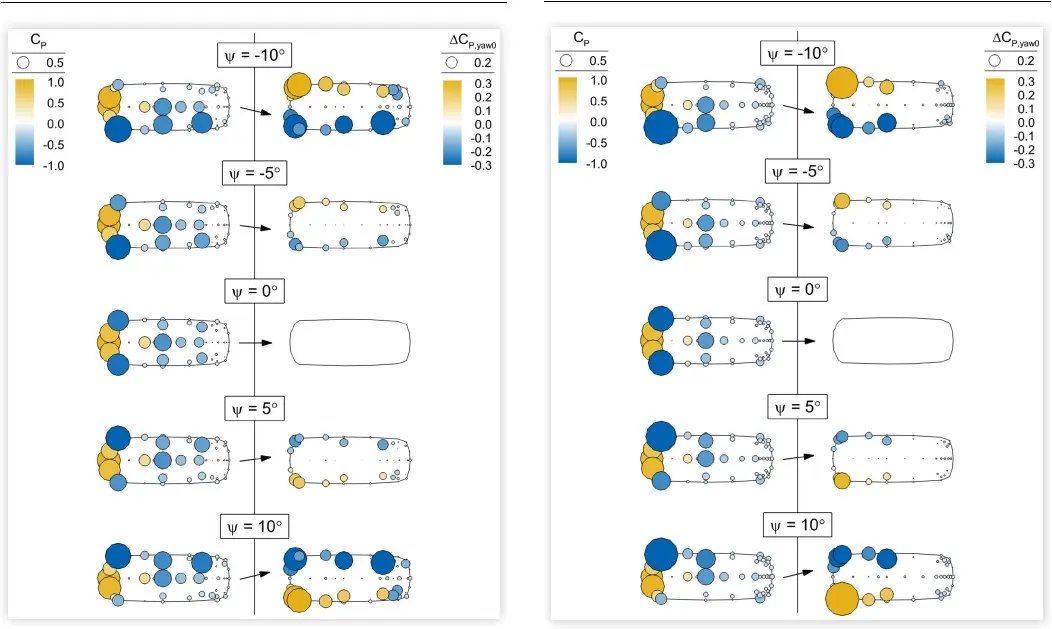
图 10(左) 孤立的 DrivAer 模型的表面压力系数(流动方向由中心箭头指示)。CP 左栏为量级,右栏为与零偏航的差值(ΔC P,yaw0) )。图 11(右)孤立的 AeroSUV 模型的表面压力系数(流动方向由中心箭头指示)。CP 左栏为量级,右栏为与零偏航的差值(ΔC P,yaw0) )。
DrivAer 与 AeroSUV 组合的结果
在之前的论文中,展示了阻力、侧向力和升力测量值的一个子集,表明在存在邻近车辆模型的情况下,这些测量值会发生显著变化(例如,阻力系数变化高达±20%)。在这里,以不同的方式(散点图格式)呈现了相同的测量值,以方便对表面压力测量的解释。图12展示了在1个波长横向间距下,使用DrivAer和AeroSUV进行相互邻近测量时,所有纵向间距和横摆角度条件下的力系数结果。上排显示DrivAer模型的力系数值,中排显示AeroSUV模型的力系数值,下排显示净双车系统(使用方程5计算)的力系数值。在每个图中,每个条件下的圆圈大小表示相应的力系数的大小,而颜色和阴影表示与相应孤立车辆值的差异。在每个图的左侧为每个横摆角度提供了孤立车辆的结果,以供参考。作为提醒,AeroSUV(邻近车辆)的结果已转换以表示与DrivAer(主车辆)模型相邻的车道车辆,因此,相对于中呈现的数据,横摆角度和偏航不对称载荷系数(侧向力、滚转力矩、偏航力矩)的符号已改变。图8显示了图12中所示的横摆角度、力系数和纵向分离的符号约定。
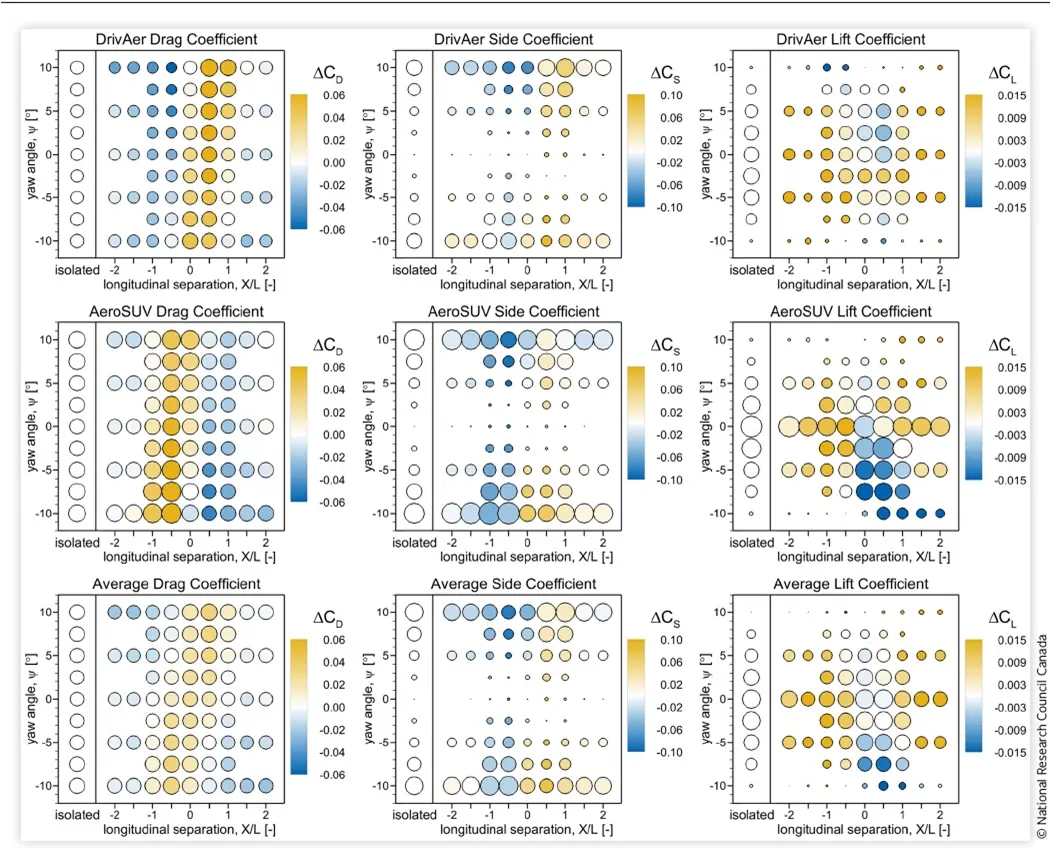
图 12 的阻力系数结果凸显了麦考利夫和巴伯所观察到的趋势,即车辆的空气阻力可能更高或更低。
与相邻车道车辆存在时的孤立状态相比。如果考虑 0°横摆角,显然对于两辆车来说,当邻近车辆大约在后 0.5 车长处时出现阻力最大值,而当邻近车辆大约在前 0.5 至 1.0 车长处时出现阻力最小值。阻力的峰值增加约为峰值减少的两倍,这表明近距离的横向驾驶产生的有害影响大于有益影响。这反映在最低图例中的净双车系统阻力系数上,对于 0°横摆角,主要是在±1 车长范围内阻力增加。随着横摆角的变化,每辆车的最大和最小阻力条件的纵向位置在正横摆角时向后移动,在负横摆角时向前移动。对于每辆单独的车辆,这种移动约为从一个极端到另一个极端(±10°)的 0.5 车长,而双车系统在峰值阻力增加的位置上显示出约 1.0 车长的移动。
在图12的单车结果中,阻力系数的极端偏差发生在横摆角度最大值时,此时邻近车辆位于上风侧(对于DrivAer为+10°,对于AeroSUV为-10°)。对于双车系统,极端偏差也发生在横摆角度最大值时,但无明显偏向于某一侧风方向。
侧向力系数的结果也表明,当车辆模型侧向靠近时会有变化。与阻力不同,两辆车的侧向力系数随横摆角和纵向间距的变化趋势相同,甚至变化的幅度也相似。这反映在顶部、中部和底部侧向力系数图线的高度相似性上。在横摆角为 0°时,结果显示当车辆模型并排放置(X/L = 0)时变化不大,但随着纵向距离的变化,诱导侧向力出现在领先车辆的方向上(+X/L 时 +ΔCS ,-X/L 时 -ΔCS )。这种情况在距离约为±1 辆车长以内都会发生,超过这个距离它们就会消失。在测试的极端横摆角下也观察到了相同的趋势,ΔCS 指向领先车辆,然而在较大的横摆角度下,存在一些较大幅度的变化。在约±1 倍车长分离距离内,侧向力为零的横摆角度会偏移多达几度,这表明近距离车辆的存在会导致有效流动倾斜度的变化。
升力系数数据的不确定性为±0.015,主要由随机不确定性贡献,这与图12中ΔC L颜色标度的范围一致。因此,ΔCL的大小不可靠,但DrivAer和AeroSUV升力系数结果之间的一些相似性表明,这些趋势可能是真实的。结果表明,当AeroSUV领先DrivAer(- X/L)时,两个模型的升力都会增加,而当DrivAer领先AeroSUV时,迎风模型的升力会减少。在三个力系数中,升力似乎最容易受到车辆几何形状(掀背车与旅行车)差异的影响,并且其中一个模型对双车系统结果的偏差更大。然而,升力系数的不确定性太大,无法在这方面得出任何明确的结论。
如前所述,还测量了三个力矩系数,并基于地面水平、中心线和中轴距的力矩中心,研究了它们对邻近效应的影响。滚动力矩和偏航力矩变化的趋势与图12所示的侧向力系数数据的趋势相似,而俯仰力矩系数的Δ值的变化趋势与阻力系数的变化趋势非常吻合(ΔCD). 鉴于俯仰力矩通常受到升力的强烈影响,尤其是前后差异,这一观察结果表明,升力的变化对邻近效应的贡献远小于阻力系数,这与ΔCL 值的实验不确定性相似。
图 13 展示了在 0°横摆角下车辆接近对 DrivAer 和 AeroSUV 模型的表面压力系数的影响,使用 ΔCP,iso 参数来表示大小和填充颜色。该参数表示在同一横摆角下与相应孤立车辆状况的 Cp 的差异。DrivAer 模型位于右侧车道(上部车身),AeroSUV 在不同相对纵向位置显示,而风矢(U)表示相对于模型的风向。
根据图12的结果,在X/L = -2.0和-1.5(顶部两个图)时,两种车辆都经历了较小的阻力减少。对于DrivAer模型,ΔCP,iso结果显示其前内(左)角区域压力较低,或产生有效的推力(向前吸力),这是阻力减少的原因。对于AeroSUV,在向前位置,其前内(右)角和内(右)侧窗区域压力增加,这并不能解释阻力减少。AeroSUV的底部区域显示小正的ΔCp,iso,这可能是阻力减少的原因,但幅度约为0.01,远低于±0.03的不确定性阈值,因此不是决定性的观察原因。
图 13 在0°横摆角下,DrivAer(右车道)和AeroSUV(左车道)两种车型相对于孤立车辆条件的表面压力系数偏差
来源:AutoAero













