当纵向距离减小到 -1.0 和 -0.5 车长时,这两个模型在 X 方向上相互重叠,DrivAer 仍处于阻力减小的状态,而 AeroSUV 的阻力则有所增加。这与 DrivAer 模型前表面的前向推力增强有关,而 Aero-SUV 模型上可测量的基础压力降低与前角压力增加的增强有关。X/L = -0.5 的条件代表了在 0°横摆角下 AeroSUV 测量到的最低基础压力状态。
当两个模型并排放置时,在 X/L = 0 处,它们都经历了比单独车辆状态更大的阻力增加。在大多数压力测量点,除了两个车辆模型之间的前角,观察到 CP 普遍下降。基础压力的降低是两个模型阻力增加的最主要原因,而前角压力的增加是次要影响。这些压力模式的变化类似于在侧壁接近性研究中观察到的变化。正如其他研究者对并排车辆配置的数据所强调的,内前角压力的增加是由于多车辆体前方更大的有效滞止区域,使每个体的滞止点向中间移动,导致有效横摆角度的小幅增加。在图10和图11中,ΔC P,iso 中前角侧向不对称性与非0°横摆角度条件相似,证实了这一影响,侧向压力差的幅度表示小横摆角度,约为几度。
由于 AeroSUV 的定位比 DrivAer 模型更靠下游,在很大程度上,这两种车型表面压力的趋势是相反的。在 X/L = 0.5 和 1.0 时,DrivAer 的前角压力增大,底部压力减小,而 AeroSUV 由于其前表面的低压导致推力增大。在 X/L = 1.5 及更远的位置,Aero SUV 的前角吸力以及 DrivAer 无法测量的底部压力增大可能是两种车型阻力减小的原因。这里在 X/L = ±0.5 时对先导车辆的高阻力和对跟随车辆的低阻力的观察类似于赛车运动中的侧向气流效应。这里观察到的推拉效应表明,Gan 等人对侧向气流效应的解释,即先导车辆阻力的增加是由于重新定向的气流撞击扰流板并增加其阻力,可能只是强调了多种机制中的一种。此处展示的结果表明,对于没有扰流板且具有不同后部形状(轿车和 SUV)的车辆,压力场变化在创造推拉场景方面起主导作用,并且可能是侧向气流效应的更主要机制。对每辆车的不同影响使得跟随车辆由于阻力减小而加速向前,同时由于阻力增大而使领先车辆减速。
为了研究横摆角度对表面压力的影响,仅展示了+10°横摆角度的一组数据,以突出在所有测试偏航条件下观察到的重要特征。这些数据在图14中显示,对于DrivAer-AeroSUV组合。从X/L=0到+2.0(下五个图),两种模型的ΔC P,iso趋势与图13中相应的0°横摆角度条件相似。当并排位于X/L=0时,两种模型都经历了内前角压力的增加,但迎风侧AeroSUV在更大面积上的压力增加效果更大,而背风侧DrivAer在更大面积上的压力减少。这些综合作用导致AeroSUV的阻力增加,但DrivAer前角效应的减少导致阻力变化中性。总体而言,DrivAer模型的大部分表面压力似乎有所减少,平衡了增加的前向推力和增加的底部阻力。随着AeroSUV进一步向后移动,这种整体压力减少消失,DrivAer的阻力主要由于底部压力的减少而增加。从 X/L = 0.5 到 1.0,DrivAer 模型的基础压力降低量明显大于在横摆角为 0°时所观察到的降低量。
对于所有X/L < 0的位置(图14中的前四张图),横摆角对DrivAer模型的影响最为显著。ΔCP,iso结果显示,前侧内角处的压力显著降低,同时下风侧/右侧底部的压力增加。这种综合效应揭示了力系数显著减小的原因,以及两种车辆模型如何影响局部流场。将图14中X/L < 0时的ΔCP,iso结果与图10中的ΔCP,yaw进行比较,特别是-10°条件下的结果,表明在X/L < 0且横摆角为+10°时,DrivAer模型的横摆角有效减小。类似的前表面压力不对称模式表明横摆角发生了变化。这些模式并不完全匹配,接近情况下底部压力相应增加,这表明AeroSUV模型的尾流可能与DrivAer模型的侧面和底部产生了相互作用。需要通过流动可视化来验证这一假设。
在0°和10°横摆角下,两种模型的前表面均观察到多次ΔCP,iso的侧向不对称现象。鉴于这些不对称现象主要发生在前车,因此这种不对称表明后车以这样的方式影响整体流场,使前车经历有效横摆角的变化。这不仅有助于解释车辆阻力系数的变化,还解释了之前提到的侧力系数的变化。例如,在10°横摆角的并排模型中,AeroSUV前右角的高压使车辆向左偏转,抵消了孤立条件下的向右侧力,表明横摆角减小。从图13和图14的ΔCP,iso结果中还可以观察到另一个重要现象:在任何给定的纵向间距下,表面压力的最大降低发生在两车最接近的区域,例如前车的底部和后车的前部,以及并排时两车的大部分区域。这一观察结果似乎对力系数的变化贡献最大,表明主要的接近效应是两车对整体流场的共同阻挡。风洞中模型的总阻挡率(约2-3%)不足以解释所观察到的效应是由隧道壁引起的,因此可以将其归因于车辆模型之间的真实接近阻挡效应。这里观察到的ΔCP,iso模式与Kremheller在货车超车乘用车现场测量中观察到的模式相似。但这里的幅度较小,这是由较小的接近车辆和两车之间缺乏相对运动所预期的。超车运动通常由于与超车车辆更快移动相关的更高相对动压而导致载荷发生更大变化,因此,瞬态超车研究结果可能表明静态接近效应,但可能高估了幅度。下一节将讨论车辆尺寸效应。
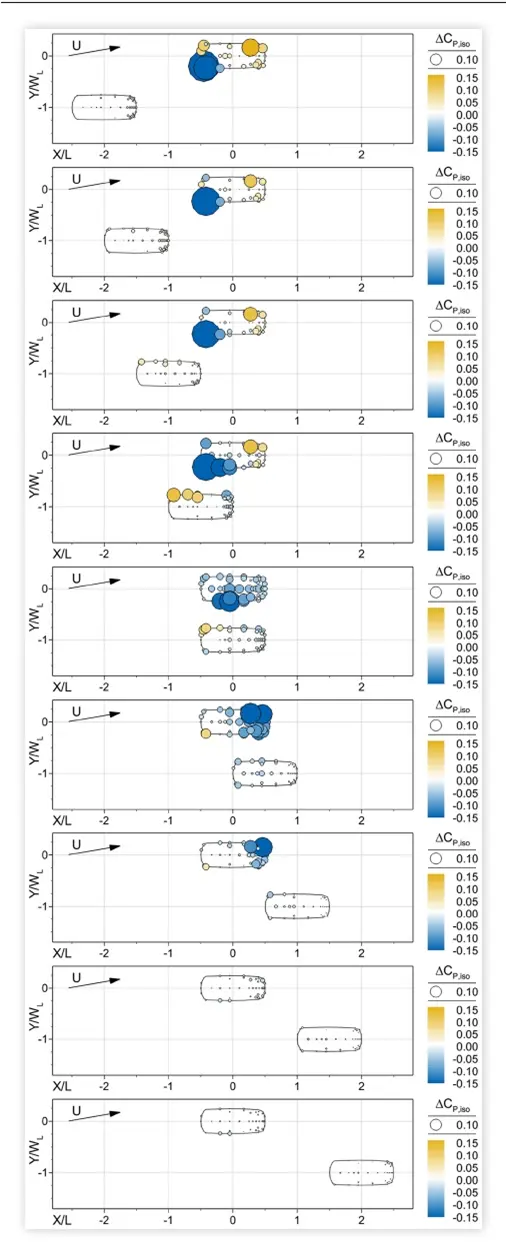
图 14 在横摆角为 10°时,DrivAer(右车道)和 AeroSUV(左车道)的地面压力系数偏离孤立车辆条件的偏差,X/L 范围从 -2.0(顶部)到 +2.0(底部)
来源:AutoAero













