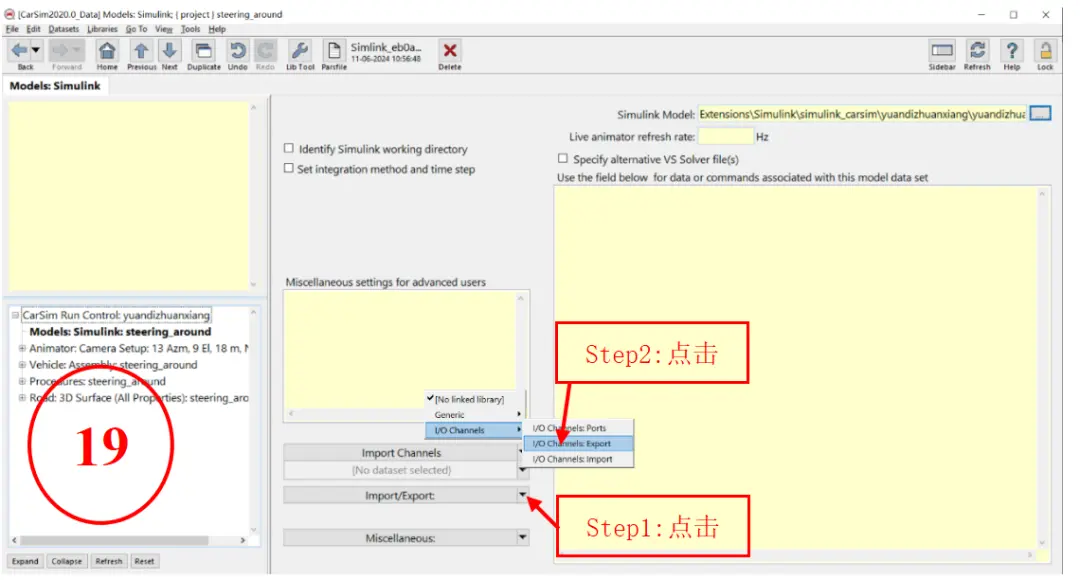
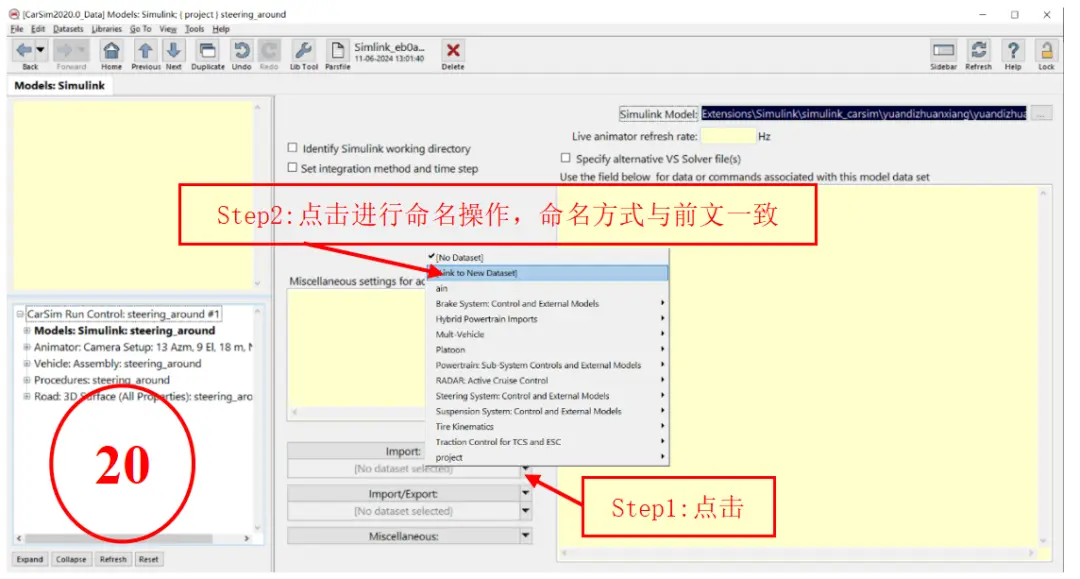
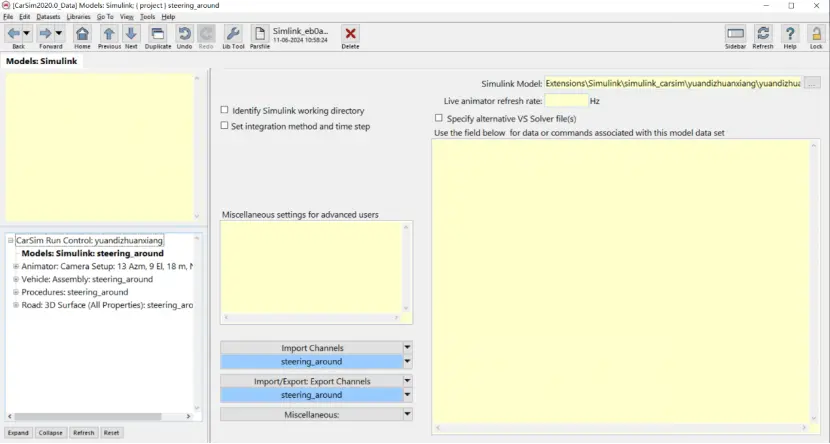
用同样的方式对输出口进行命名操作,完成后得到下图所示界面:
对输入变量进行选择:
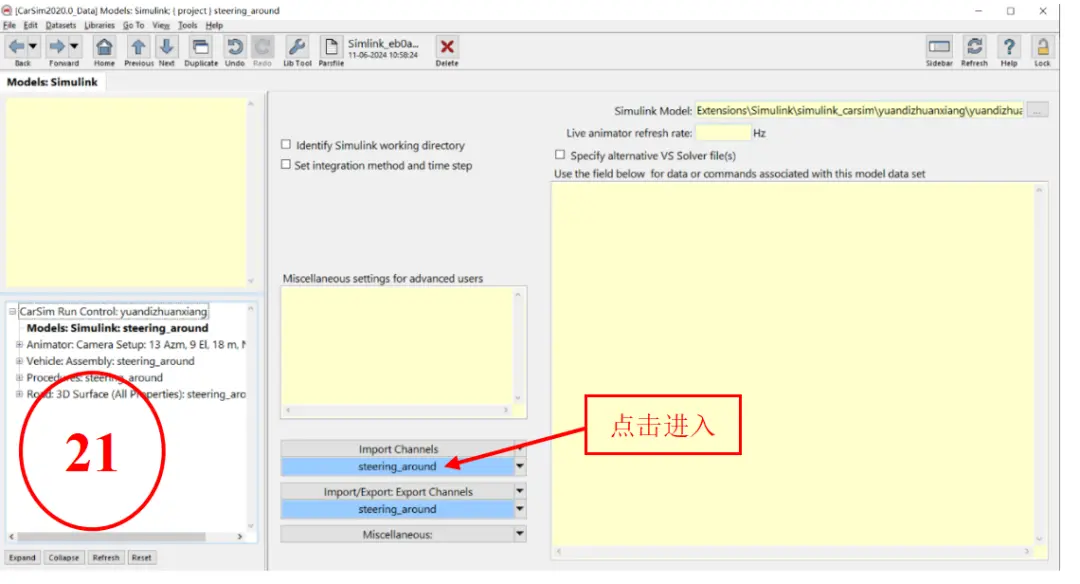
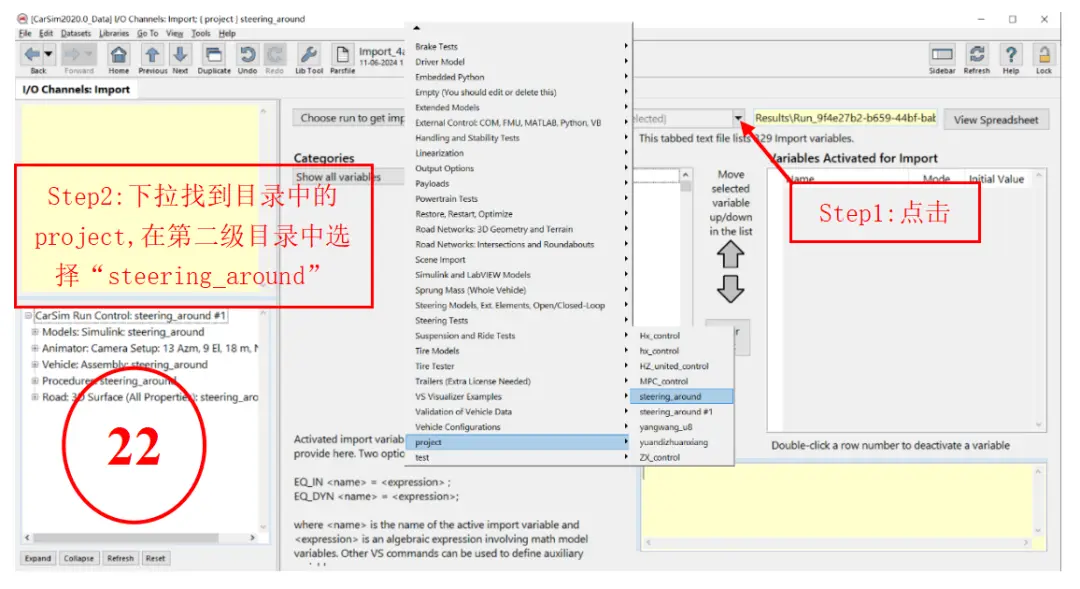
选择输入变量
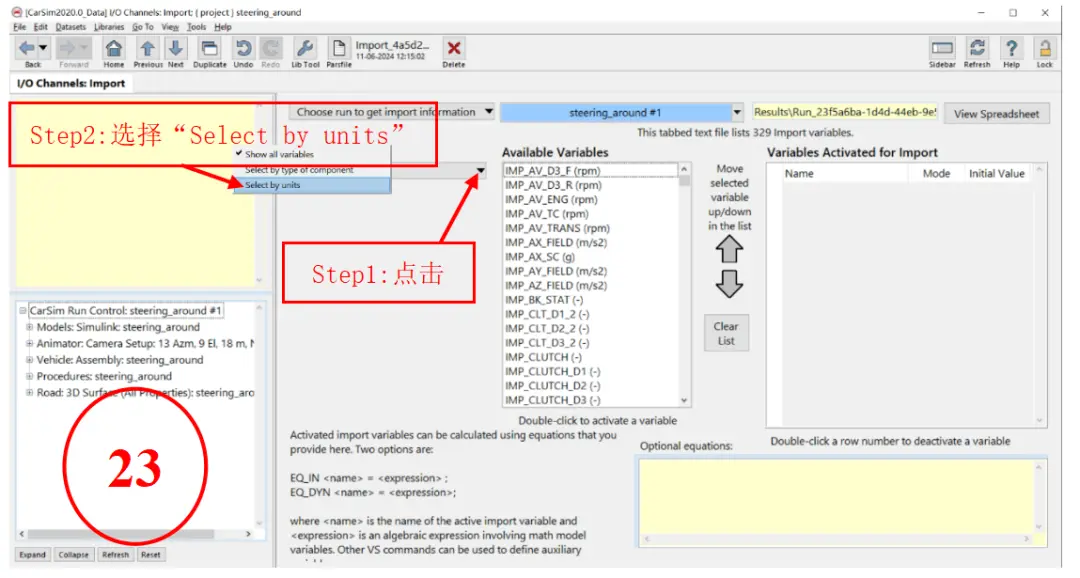
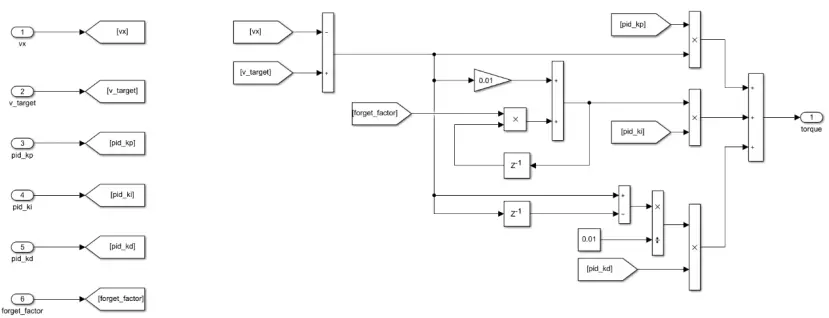
因为,控制车辆原地转向的是四个轮端扭矩,因此原地转向的控制量为四个车轮的扭矩:

返回上一级进行输出变量选择,以对车辆运动状态进行观测:
来源:智能运载装备研究所
作者:林龙
用同样的方式对输出口进行命名操作,完成后得到下图所示界面:
对输入变量进行选择:
选择输入变量
因为,控制车辆原地转向的是四个轮端扭矩,因此原地转向的控制量为四个车轮的扭矩:
返回上一级进行输出变量选择,以对车辆运动状态进行观测:
来源:智能运载装备研究所
作者:林龙


2026-03-24
2026-03-20159
2026-03-19163
2026-03-19157
2026-03-18200
2026-03-18157
2026-03-18146
2026-03-12406

2026-03-11

2026-03-11


