rFpro可结合使用高级着色器语言(HLSL)插件来进行实时的图像后处理,帮助用户在rFpro中进行大灯光照强度分析,用户可以通过设置不用颜色的照明亮度线来显示灯光亮度阈值,如下图所示:
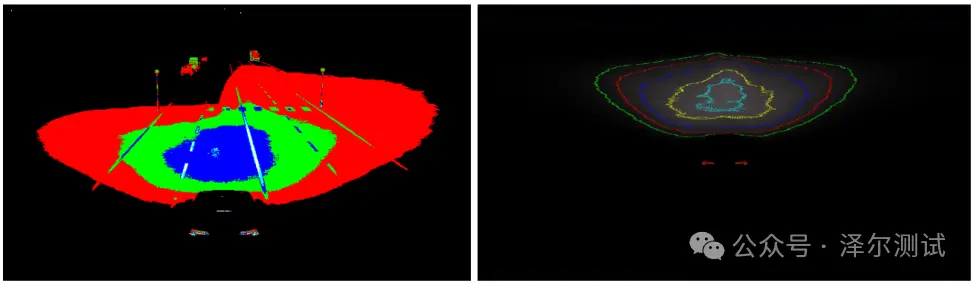
图 6 rFpro结合HLSL插件分析灯光亮度分布
rFpro中用户可以添加灯光测试墙,该测试灯光测试墙可以固定在车辆的特定位置,并随车辆移动包括pitch、roll、yaw方向的运动。同时用户可以通过其他第三方建模软件创建测试墙,墙体以.OBJ格式保存,并与关联的材料文件(.MTL) 将它们一并导入到rFpro的场景编辑器中,并重新保存在成.GMESH格式。
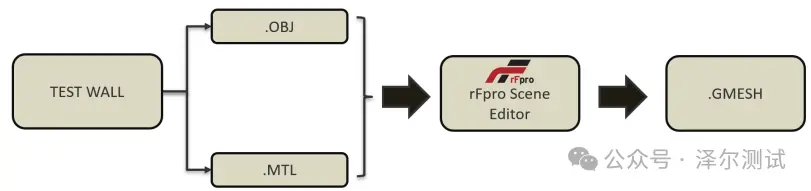

图 7 rFpro预置的灯光测试墙示意图
下图是真实环境中大灯照射到建筑物墙面的示例。

图 8 rFpro虚拟环境下的灯光测试与实际环境对比效果
将车辆大灯光束投影到墙体上,并将灯光亮度作为角度函数与IES曲线进行比较,测试场景工况场景如下图所示:
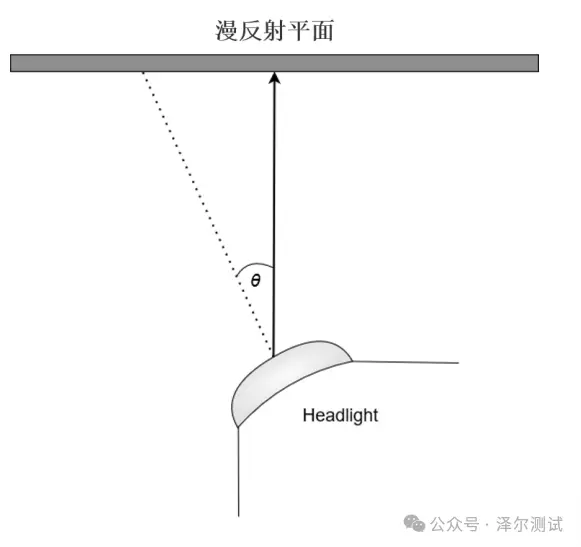
图 9 车辆大灯亮度与角度测量关系测试场景示意图
在该测试中,我们对测量的分辨率和 FOV 进行了适当的缩放,使得 1 °等于 10 像素。这与实际测试完全一致,因此可以直接比较两个测试的结果值。由于灯光亮度不需要进行归一化处理(即它们的最大值都是 400 左右),并且轮廓没有被拉伸,而之前的轮廓则需要进行一些处理才能使其重叠。轮廓中出现的小差异与引擎中BRDF(双向反射分布函数)的计算方式有关,导致两者之间出现了小于10%的差异。这在仿真环境中是预期的测试结果,并且可以通过进一步增加光线追踪的采样数可以改善结果。
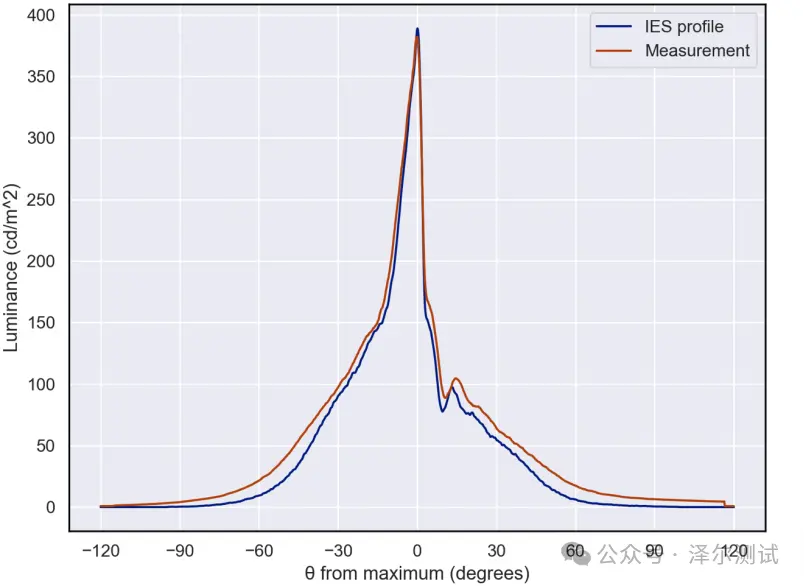
图 10对于一个完全漫反射的表面,在5米距离下车辆头灯亮度随测量角度的变化图
rFpro具备调光曲线模拟的功能,如下所示:
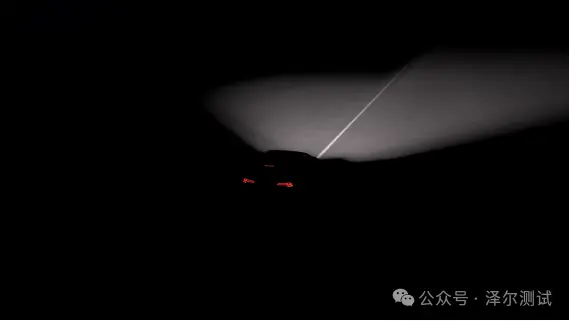
图 11 对数灯光模拟

图 12 线性灯光模拟
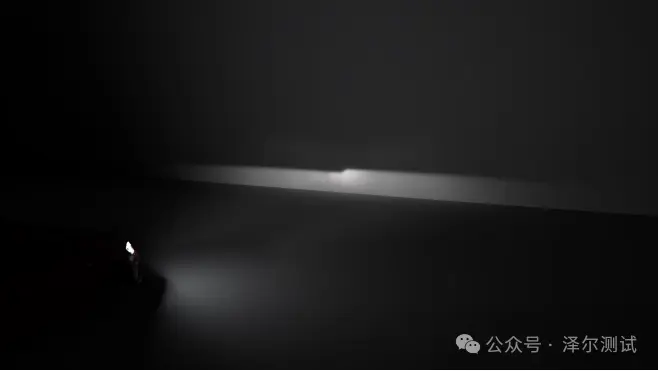
图 13 孟塞尔灯光模拟
rFpro支持灯光体积雾环境模拟功能,在该环境下rFpro可以模拟光散射和衰减,并且提供多种可配置参数,例如密度系数。

图 14 rFpro体积雾环境灯光模拟效果
ZKW汽车照明系统制造商已采用rFpro平台对自家所有的大灯产品进行研发和测试,使用 rFpro 将显著减少客户在现实世界中的测试需求,并在产品开发项目中节省大量成本。
图 15 ZKM厂家采用rFpro平台开发大灯产品
结尾:
感谢您阅读关于基于rFpro平台的智能大灯测试介绍。随着虚拟仿真技术的不断进步,rFpro为汽车制造商和研发人员提供了更加精确、高效的测试环境,助力智能大灯等高级驾驶辅助系统的研发和优化。未来,虚拟仿真将继续推动汽车行业的创新。如果您对智能大灯测试或rFpro仿真平台有更多疑问或兴趣,欢迎留言讨论,期待与您进一步的交流。
来源:泽尔测试
作者:谢裕舒