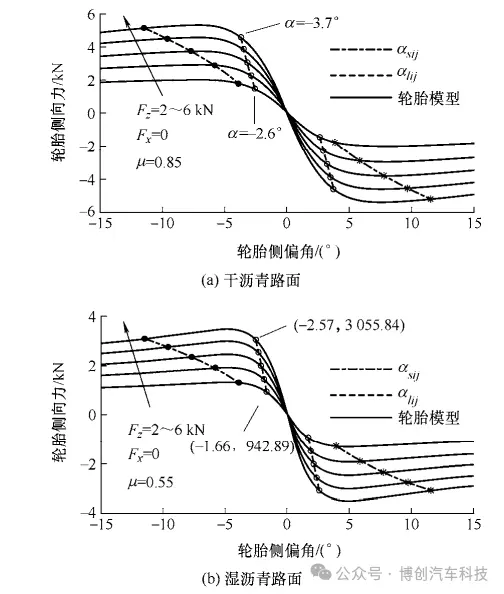
图 4 轮胎侧偏特性模型
所制定的转向方式切换控制策略如下:当,
时,此时轮胎侧偏角都处于线性区域,前轮可以产生可控的侧向力,可以主要依靠前轮转向,式(20)将采用式(25)的比例参数,使用稳态转向的方式;若
,表明存在轮胎侧偏角不处于线性区域,单纯依靠前轮转向无法达到需求侧向力,此时后轮转角逐渐增大,比例参数由式(25)向式(27)转化,以车辆横摆角速度以及侧向加速度不发生突变作为控制目标进行平稳转向,处于稳态转向到斜向行驶转向的过渡过程;若
,则说明存在轮胎侧偏角处于饱和区域中,在转向过渡过程也无法满足需求侧向力,则必须使用完全斜向行驶来分担轮胎侧向力以减小轮胎侧偏角,采用式(27)的比例参数。
2.1.2 车身运动控制器构建
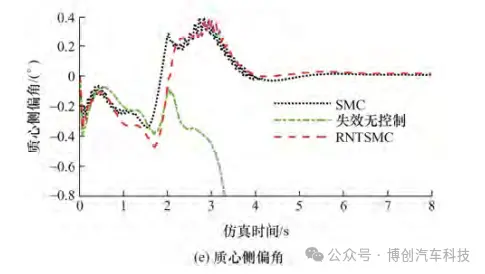
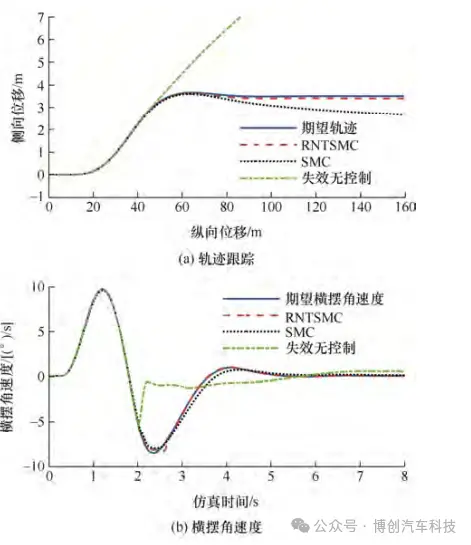
文献[33]的研究中发现,在跟踪期望横摆角速度的过程中跟踪误差会不断累积,有可能会导致车辆的航向角ψ偏差较大,进而影响车辆的循迹能力;同时,根据式(1)可知,ωr 的控制精度会影响 vx以及vy ,从而影响车辆的稳定性。因此,本文增加了对横摆角的跟踪控制,并且考虑到转向失效所带来的冲击,需要增加控制系统的抗干扰能力,采用RNTSMC 来设计横摆角速度控制器,增加控制精度和鲁棒性。
横摆角跟踪误差

横摆角速度跟踪误差

横摆角加速度跟踪误差

为了有效跟踪期望值,构造滑模面函数
式中, λ1、 λ2 为正奇数,且 1<λ1/ λ2<2,故当对滑模面函数 r s 求导
 ,不存在负指数次项,避免了终端滑模的奇异现象。本文中λ1=19, λ2=11 。
,不存在负指数次项,避免了终端滑模的奇异现象。本文中λ1=19, λ2=11 。
其次,为了增加滑模变量的收敛速度,减小输出抖振[34],设计递归积分终端滑模面为
式中,k和y为滑模面设计参数,其值均大于零。本文中k=12, y=13 。
为了保证转向电机失效后,控制系统仍然可以正常运转,本文引入了两个自适应参数[35] k1和 k2
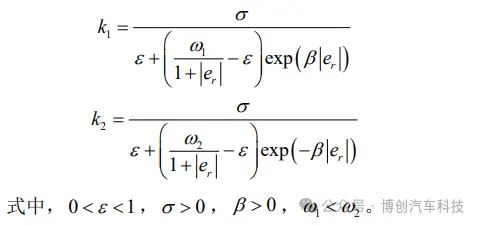
本文中 ε =0.5,σ =20,β=2.08,ω1=0.8,ω2=10。
两个参数的设计思路如下:系统位于滑模面上时,有
 ;当系统状态远离平衡点时,收敛时间主要由
;当系统状态远离平衡点时,收敛时间主要由
 决定[36],此时随着 |er|的增大,由于 k1趋近于 0, k2趋近于 , 2 1 k k ,所以控制系统有更快的收敛速度;而当系统状态接近平衡点时,收敛时间主要由r r 1 e ke 决定,此时随着 r e 的减小, 1 k 趋近于,k2>k1 ,所以控制系统有更快的收敛速度;而当系统状态接近平衡点时,收敛时间主要由
决定[36],此时随着 |er|的增大,由于 k1趋近于 0, k2趋近于 , 2 1 k k ,所以控制系统有更快的收敛速度;而当系统状态接近平衡点时,收敛时间主要由r r 1 e ke 决定,此时随着 r e 的减小, 1 k 趋近于,k2>k1 ,所以控制系统有更快的收敛速度;而当系统状态接近平衡点时,收敛时间主要由 决定,此时随着 er 的减小,k1 趋近于
决定,此时随着 er 的减小,k1 趋近于 ,k2 趋近于
,k2 趋近于 , 由于ω1<ω 2, k1>k2 ,保证了系统的收敛速度,同时抑制
, 由于ω1<ω 2, k1>k2 ,保证了系统的收敛速度,同时抑制 sgn(er ) 项的抖振。
sgn(er ) 项的抖振。
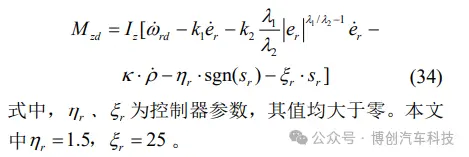
为了增强控制的鲁棒性,保证车辆执行器失效后的稳定性控制,采用指数趋近律设计切换控制器,结合式(1)和式(32),设计上层横摆角速度 RNTSMC 为
运用 Lyapunov 函数证明所设计控制器的稳定性,可定义 Lyapunov 函数为

对式(35)求导,并将式(32)求导后代入,结合式(1)、式(30)和式(34)得
为了尽可能减少计算量,同时避免控制参数过多,在保证控制需求的前提下采用普通滑模(Slidingmode control,SMC)设计纵向速度和侧向速度控制器。纵向速度和侧向速度的跟踪误差分别为 ex、 ey,表示为

滑模面设计为

式中, cx、 cy 为满足 Hurwitz 条件的参数,均大于零。本文中cx=1, cy =20。
采用指数趋近律,即

控制输入中的符号函数sgn(x) 会给系统带来抖振,同时会影响系统稳态时的收敛精度,为了抑制这种影响,同时保证滑模控制强鲁棒性的特点,选择 sigmoid 函数[37]代替符号函数,即
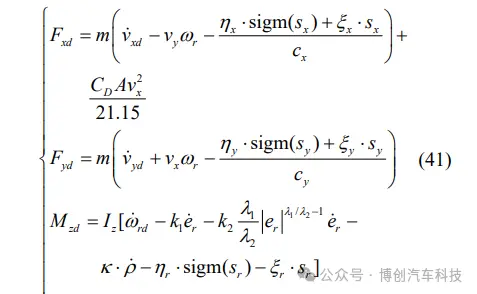
式中, a>0 ,用来调节 sigmoid 函数的收敛速度。故车身运动控制器为
2.2 下层转矩、转角分配重构控制器设计
轮胎力会受到轮胎垂向载荷的限制,为了避免车辆在运动过程中某个轮胎出现严重负载的情况,影响车辆极限性能的发挥,本文以最小化轮胎负荷率作为优化目标,在保证上层轨迹跟踪精度的同时提高车辆的稳定性裕量。优化目标函数定义为

式中, Ftxdij 、 Ftydij 分别为优化分配的轮胎纵向力和侧向力;μ为路面附着系数;cij、 sij分别为轮胎纵向力和侧向力的分配权重系数,用以调整轮胎力在优化目标函数中所占的比重。
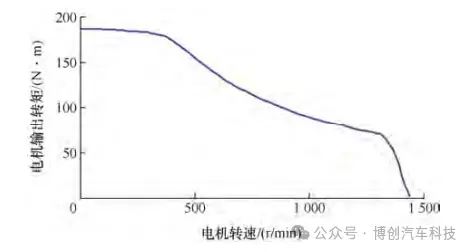
一方面,所分配的轮胎力需要满足上层控制器所需的纵向力、侧向力以及横摆力矩;另一方面,也需要考虑轮毂电机的最大输出转矩和路面附着条件的限制。故约束条件如下
来源:博创汽车科技













