一、概述
紧急呼叫系统(eCall)是一种主动安全技术,其设计初衷是为了在车辆遭遇严重事故或其他紧急情况时,系统能够自动或允许用户手动触发紧急呼叫任务,以迅速联系救援服务,从而显著减少应急响应时间,挽救更多生命。相比于传统的eCall系统,在智能化、网联化的趋势下,智能eCall急需对现有系统进行取代。

图1 传统紧急呼叫系统
二、硬件的关键设计
eCall系统作为一种紧急状态下启用的安全装置,需确保当车辆主电源失效时仍能维持系统运行并完成紧急呼叫任务。基于此需求,系统需配备有独立电源,同时该电源需设计为低功耗、长寿命的后备电池,架构示意如下:
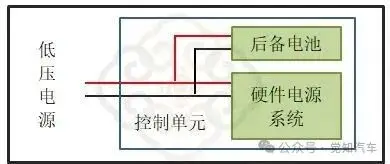
图2 eCall电源系统示意
其工作机制是:在车辆正常运行状态下,系统由整车的低压电源供电,同时整车低压电源也负责为后备电池充电,以确保其电量始终维持在安全和可用的范围内。如此一来,即便车辆在发生严重事故时,主电源电路因故中断,后备电池即可立即接管,为eCall紧急呼叫功能提供必要的电力支持,从而完成自动报警任务。
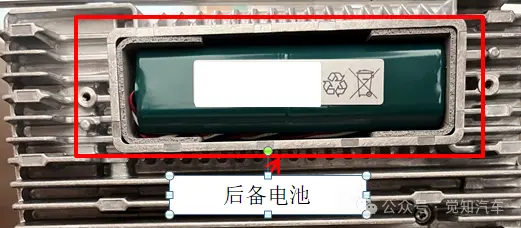
图3 后备电池设计案例
三、工作流程
通过车载传感器系统实时监测车辆状态,一旦监测到车辆发生了严重碰撞或其他紧急情况时,系统将自动启动紧急呼叫程序,对车辆的地理位置(通过北斗、GPS等定位)、车辆识别号(VIN)、型号信息、事故时间等关键信息进行收集并整理成最小数据集(MSD)。系统通过内置的通信模块拨打紧急服务电话,并自动将MSD发送给紧急救援中心。一旦与救援中心建立连接,将自动打开语音通道,并自动播放预设的求救内容,过程中若用户具备与救援中心对话的能力,可直接进行语音沟通,以让对方获取更详细的事故情况和必要的医疗信息。此外,车辆内通常也会有一个明显的手动紧急按钮,允许乘客在非碰撞紧急情况下手动触发求助任务。
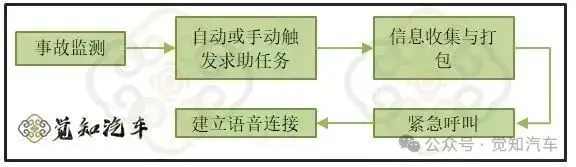
图4 eCall工作流程示意
对于上述提到的系统自动收集并整理关键信息并形成最小数据集地目的释义如下:
1)快速定位事故现场:通过定位,紧急救援服务能够迅速准确地找到事故发生的地点,尤其是在偏远或难以描述位置的地方。
2)车辆身份验证:VIN可以提供关于车辆的具体信息,包括制造商、型号、年份等,有助于救援人员了解车辆类型,判断可能的构造特性,以便采取最合适的救援措施。
3)型号与构造信息:可以帮助救援人员准备合适的救援工具和设备。
4)事故时间记录:事故时间对于记录事故细节、评估伤者状况以及后续的法律和保险事宜提供必要的信息。
四、系统触发条件
eCall系统设计时会综合考虑多种因素来决定是否自动启动紧急呼叫任务,以避免因轻微碰撞或虚假信号引发不必要的紧急响应。在车辆发生紧急情况时,对于碰撞强度的判断,通过加速度传感器监测车辆在碰撞瞬间的加速度变化,从而评估碰撞的严重程度,当加速度超过预设阈值时,表明发生的是较重大的碰撞时, 此时eCall系统会被触发。同时,系统结合安全气囊的弹出状态,若安全气囊被打开,则通常意味着发生了较为严重的碰撞事故,此时系统也将被触发。目前部分车型已实现碰撞自动求助功能,但仅碰撞单一条件还不够。
图5 碰撞自动求助eCall
在某些情况下,如车辆发生翻滚事故,但此时又没有触发碰撞传感器或安全气囊,系统需要将通过陀螺仪、角度传感器等多重数据的应用,从而检测车辆的剧烈运动情况,进而感知非碰撞类别的紧急事件,一旦检测到类似事件,eCall系统也将被触发。而针对新能源汽车的应用,还需考虑电池极端温度与eCall的联系,即在着火临界温度时,自动触发eCall。
当然,在未检测到紧急事件的情况下,车内人员可以通过手动按下eCall按钮来请求紧急援助。
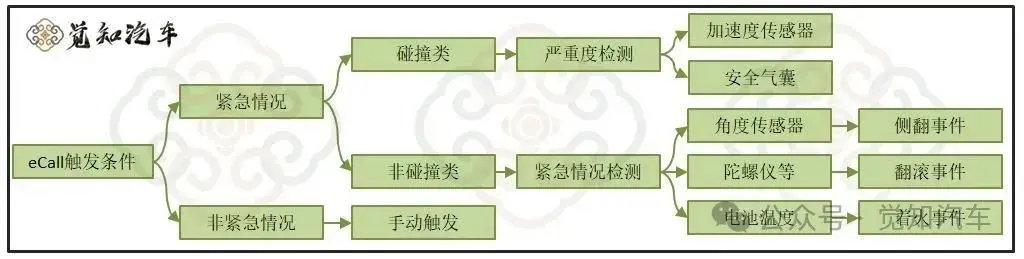
图6 eCall触发条件
五、eCall传感器系统
eCall系统的自动触发高度依赖于综合性传感器系统,这些传感器协同工作,以确保在发生紧急情况时能够及时、准确地启动紧急呼叫流程,其常见的一些传感器类型及其作用如下:
1.加速度传感器:这是eCall系统中最核心的传感器之一,用于检测车辆在三个轴向上的加速度变化。在碰撞事件中,加速度传感器能够迅速捕捉到突然的、高强度的加速度变化,这是判断是否发生严重碰撞的关键依据。
2.安全气囊传感器:这些传感器直接连接到车辆的安全气囊系统,当车辆遭受足以触发安全气囊展开的冲击时,它们会发送信号,eCall系统通过采集此数据作为自动触发的条件之一。
3.碰撞传感器:用于检测车辆遭受的直接碰撞,通常安装在车辆的关键结构部位。它们能够快速响应并发送碰撞信号,是eCall系统自动激活的重要触发点,不过此传感器通常不单独作为eCall的触发条件。
4.陀螺仪:用于检测车辆的旋转或翻滚动作,提供车辆动态稳定性信息。在车辆翻滚等非正面碰撞的紧急情况下,陀螺仪的数据对于判断事故严重性至关重要。
5.倾斜(水平角)传感器:用于检测车辆的角度变化,尤其是在车辆翻车或严重侧滑时。虽然该传感器与陀螺仪有相似之处,但倾斜传感器更专注于检测静态角度而非动态旋转。
六、策略实现基本架构
以C为例,其示意架构如下:
1. 系统初始化
首先需确保所有的传感器硬件与控制单元正确连接并初始化,这包括配置中断、设置读取周期和校准传感器等。
#include "sensor.h" // 假设这是一个包含传感器操作函数的头文件
void initializeSensors(void) {
init_accelerometer(); // 初始化加速度传感器
init_gyroscope(); // 初始化陀螺仪
init_collisionSensor(); // 初始化碰撞传感器
// ...其他传感器初始化
}
2. 事件检测与判断逻辑
通过综合分析多传感器数据,来判断是否发生了紧急情况。
int isEmergencyDetected(void) {
float acceleration = read_acceleration();
float rollAngle = get_rollAngleFromGyro();
if (acceleration > CRITICAL_ACCELERATION_THRESHOLD &&
rollAngle > ROLL_ANGLE_THRESHOLD) {
return 1; // 表示检测到紧急情况
}
// ...添加更多判断条件
else {
return 0; // 无紧急情况
}
}
3. eCall触发与信息收集
一旦检测到紧急情况,立即触发eCall过程,过程中将对上文提到的必要的信息进行收集与整理,并准备通过车载通信模块进行发送。
void triggerEcall(void) {
位置信息 = getGPSLocation();
vehicleInfo.vin = getVehicleVIN();
// 收集其他必要信息
sendToEmergencyCenter(vehicleInfo);
}
4. 语音通信与自动播报
建立与紧急服务中心的通信连接,并在连接成功后自动播放预设的语音信息,同时保持通信通道开放以供用户主动对话。
void establishVoiceConnection(void) {
connectToEmergencyService(); // 建立连接
playPredefinedMessage("这里发生了事故,请救援。"); // 自动播报
// 设置通信保持,监听并处理从紧急服务中心来的语音或指令
}
5. 异常处理与安全措施
确保软件能够妥善处理通信失败、传感器异常等情况,并在必要时采取安全措施,比如重试连接、记录日志等。
void handleExceptions(void) {
if (communicationFailed()) {
retryConnection(RETRY_COUNT); // 尝试重新连接
logError("Communication failure.");
}
// ...其他异常处理
七、总结
随着汽车智能化的发展,车联网技术与紧急救援服务的联网程度正在逐步提高,但基于当下车联网(Internet of Vehicles,IoV)、智能网联汽车(Intelligent Connected Vehicles,ICV)、基础设施建设以及数据安全与隐私保护等方面的发展状态,智能eCall系统在国内的全面应用尚无法有效实施,有的也仅是在传统基础上实现部分功能的集成。不过,随着技术的进步和相关政策支持的加强,预计在未来几年内,车辆与紧急服务中心的联网将会更加广泛和深入。
来源:觉知汽车













