1. 背景&定义&测试设备
2. 测试条件
3. 测试程序
4. 测试执行
5. 评估标准和评分
6. 鲁棒性层的适用性和障碍物尺寸
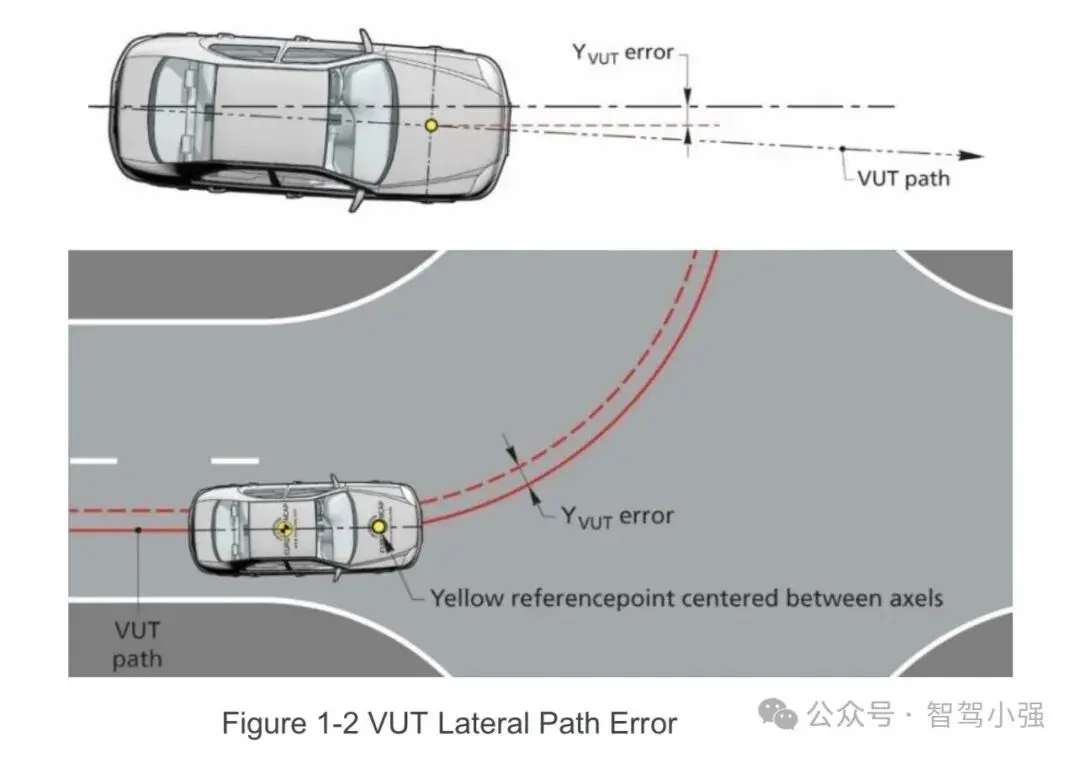
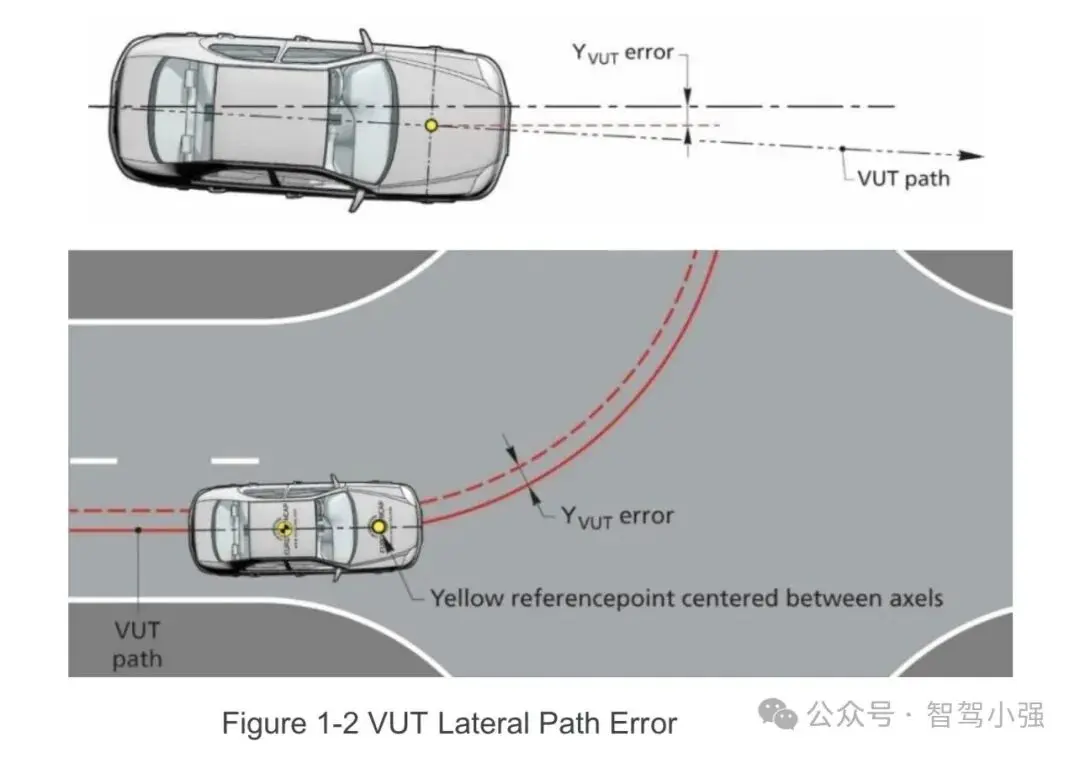
1.3 测试场VUT横向路径误差
横向偏移误量(YVUT-error)定位为:VUT前轴中心与其预期路径之间的横向距离,测量方向与预期路径平行,如图“VUT横向路径误差”所示:
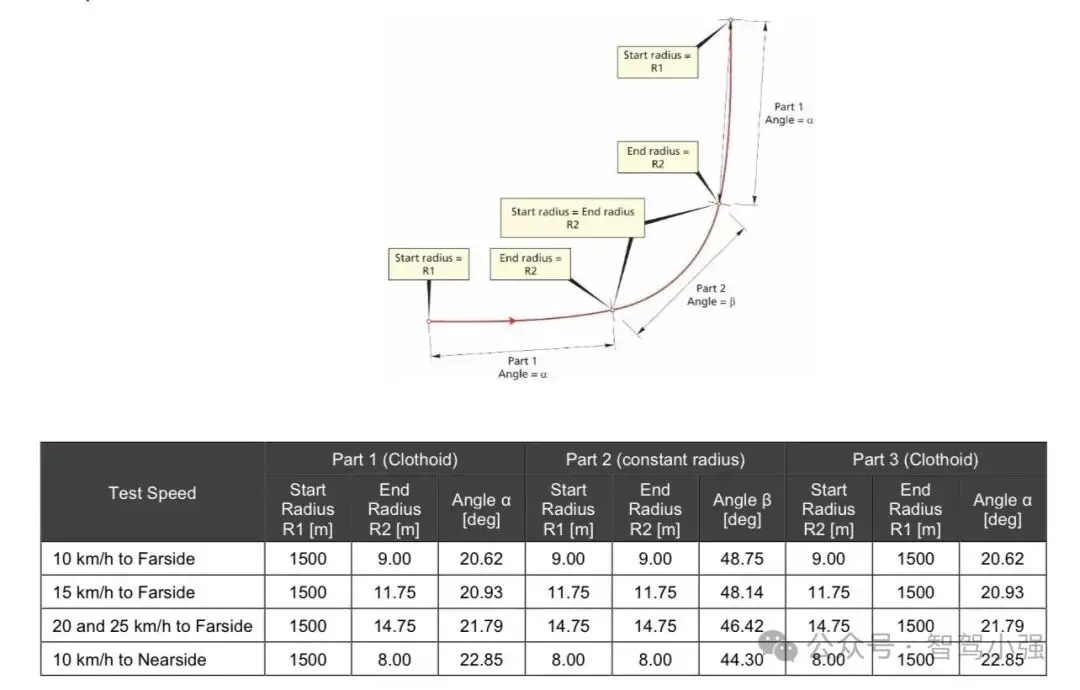
1.4 弯道场景的测试路径
对于CPTA、CBTA、CCFtap和CMFtap场景,应使用以下参数来创建测试路径。
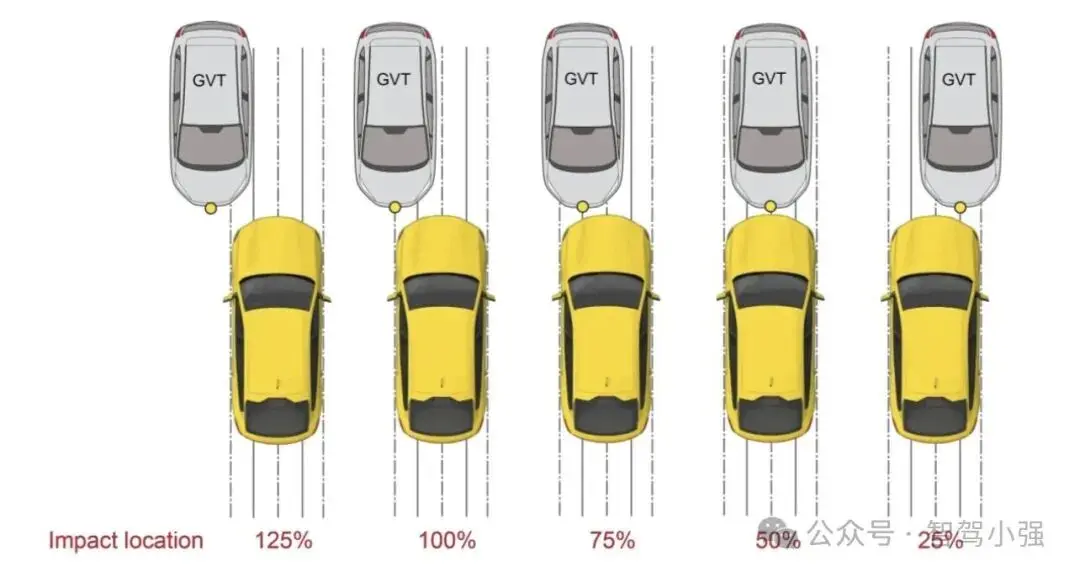
1.5 碰撞位置
碰撞位置定义为:目标物的参考点与 VUT 宽度百分比重合的位置。
1.5.1 车对车追尾(CCRs、CCRm、CCRb)
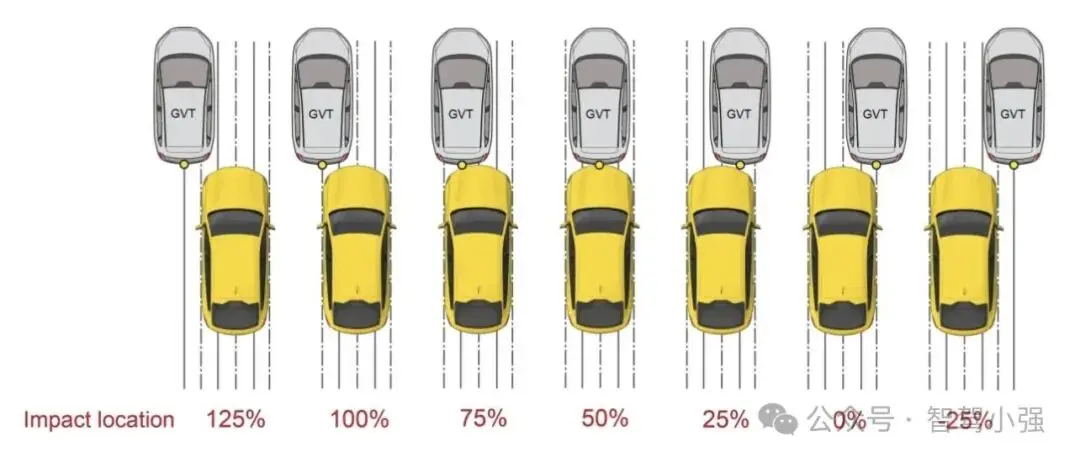 GVT参考点为车尾中心点。VUT最右侧为0%,最左侧为100%。
GVT参考点为车尾中心点。VUT最右侧为0%,最左侧为100%。
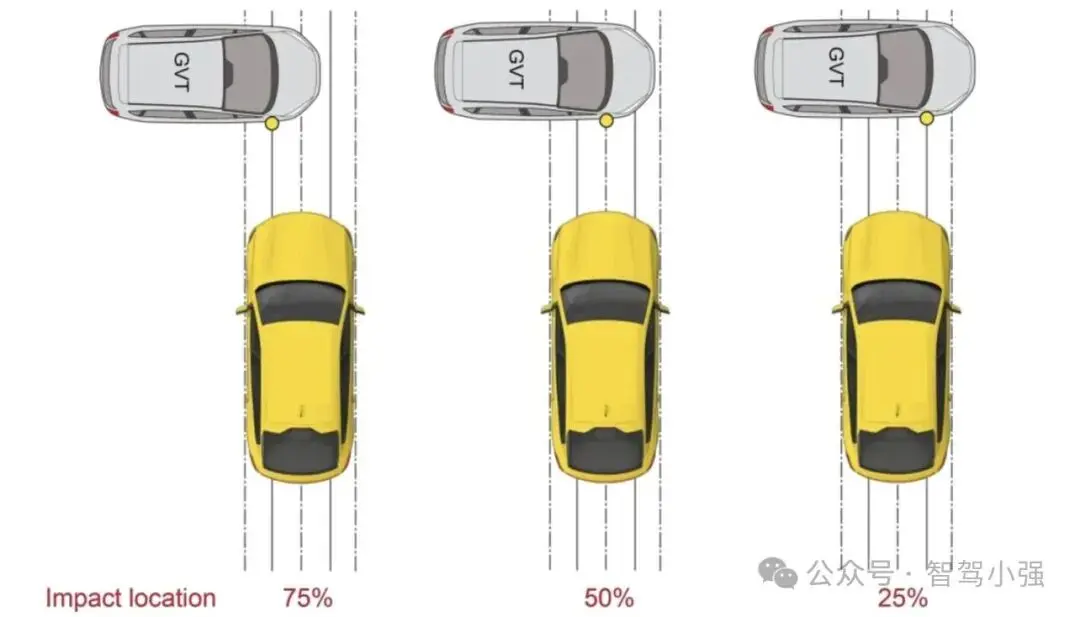
1.5.2 车对车追尾 + 航向角目标参考点发生旋转;根据 VUT 碰撞位置与旋转方向的组合,车辆可能在到达碰撞位置前先用角部边缘与目标参考点发生接触。
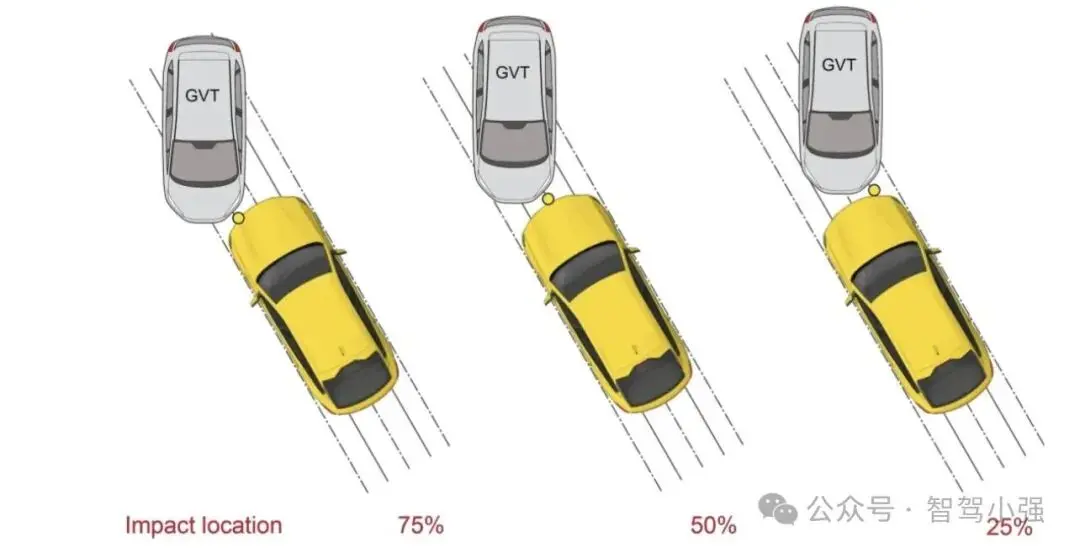
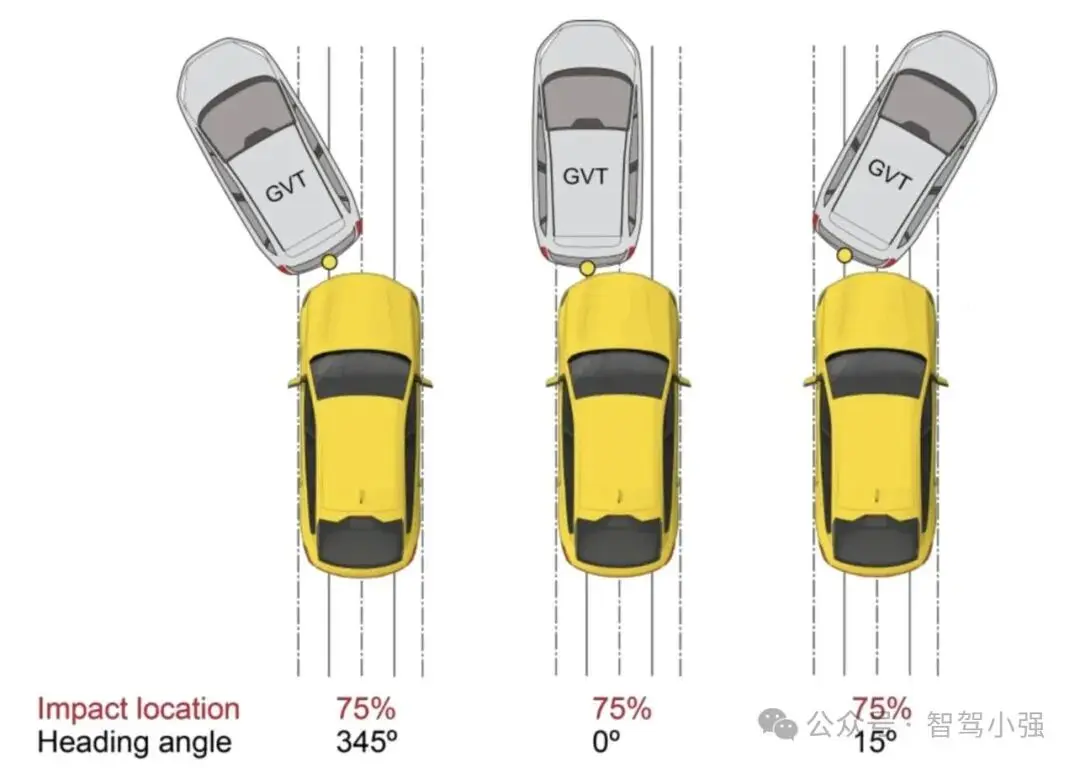 GVT参考点为车尾中心点。1.5.3 车对车正面(CCF)
GVT参考点为车尾中心点。1.5.3 车对车正面(CCF)
 GVT参考点为车头中心点。1.5.4 车对车横穿(CCC)
GVT参考点为车头中心点。1.5.4 车对车横穿(CCC)
 GVT参考点为距离最前端1/4车长处。
GVT参考点为距离最前端1/4车长处。
1.5.5 车对车对向转弯(CCFtap)
1.5.6 车对摩托车横穿
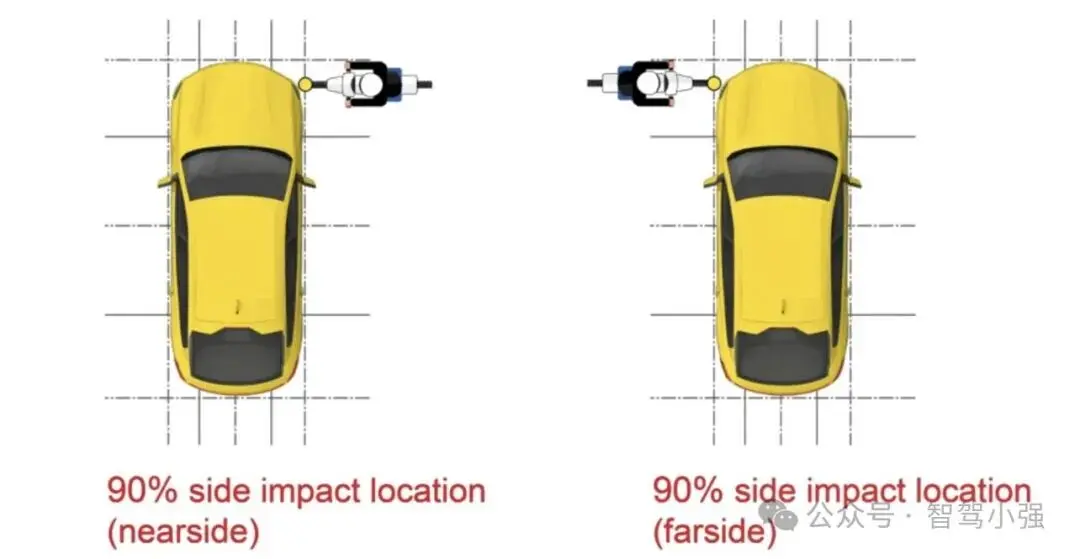 EMT参考点为车头中心点。
EMT参考点为车头中心点。
1.5.7 车对骑行者转弯
1.6 目标物
仅可使用 TB029《供应商清单》最新版本中所列设备进行测试,该版本可在 Euro NCAP 网站获取。
1.6.1 虚拟方框每个测试目标均定义一个虚拟方框,用于判定碰撞速度。各虚拟方框尺寸及与各测试目标对应的碰撞参考点见下图。
前文碰撞位置描述及场景描述说明了各特定场景应采用哪一个参考点。
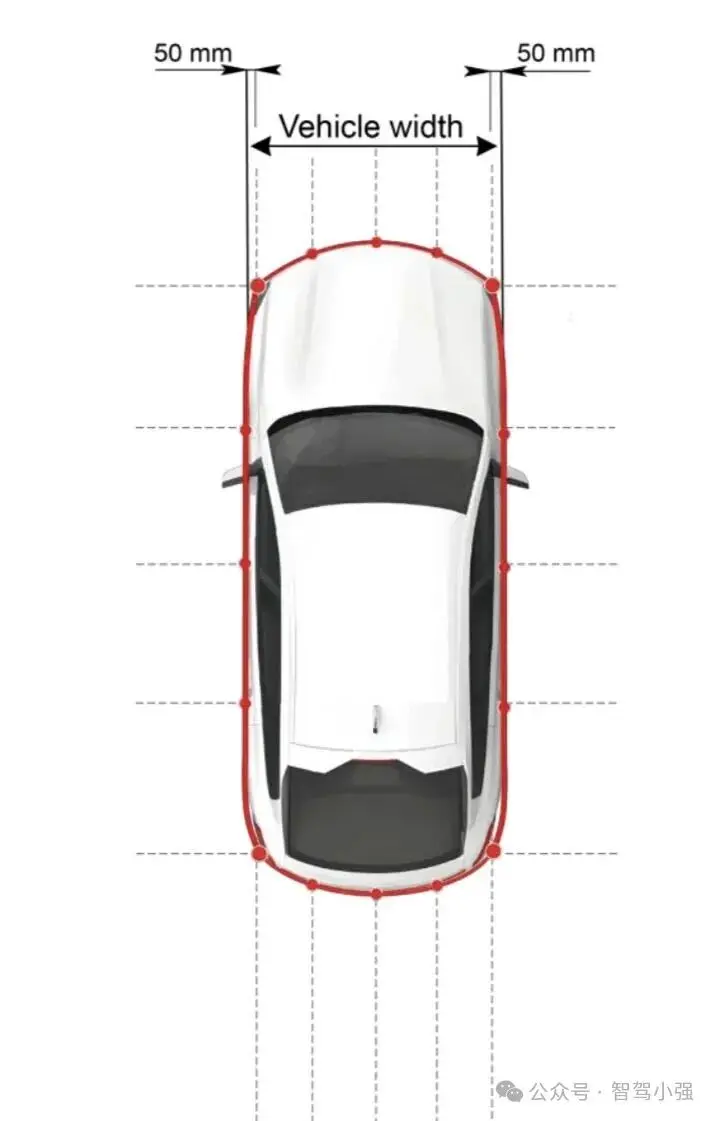
1.6.1.1 被测车辆VUT
在 VUT 前端、后端以及左右两侧均定义一条虚拟轮廓线。这些线由七段直线组成,七条直线分别连接七个等距点:
• 在车辆宽度方向上,各点距左右两侧边缘 50 mm;• 在车辆长度方向上,各点距前后两端边缘 50 mm。理论 x、y 坐标由 OEM 提供,并由测试实验室验证。
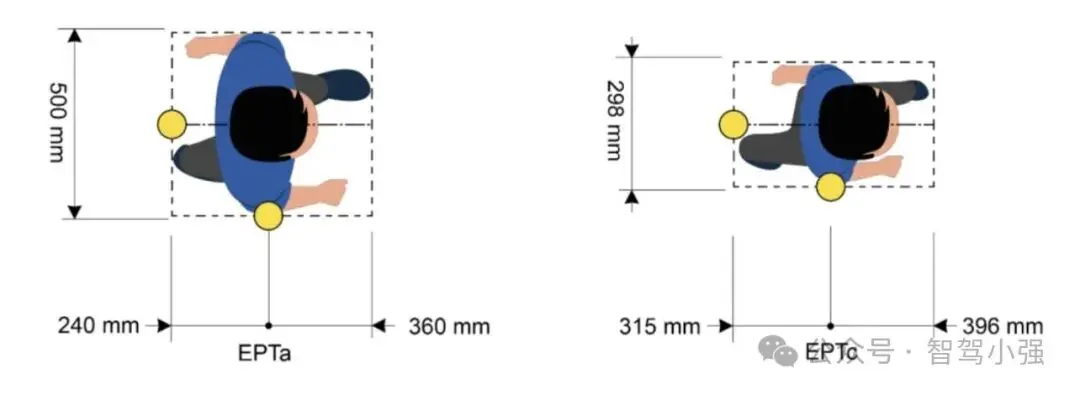
 1.6.1.2 成年和儿童假人EPTa 与 EPTc
1.6.1.2 成年和儿童假人EPTa 与 EPTc下图为该虚拟框的尺寸示意图,参考点位于假人髋部以及假人中心线与虚拟框相交处的虚拟点。
1.6.1.3 自行车骑行者软目标EBT
下图为该虚拟框的尺寸示意图,参考点分别设置于:
· 曲柄轴中心(用于横穿场景)
· 前轮最前端(用于转弯场景)· 后轮最后端(用于纵向场景)
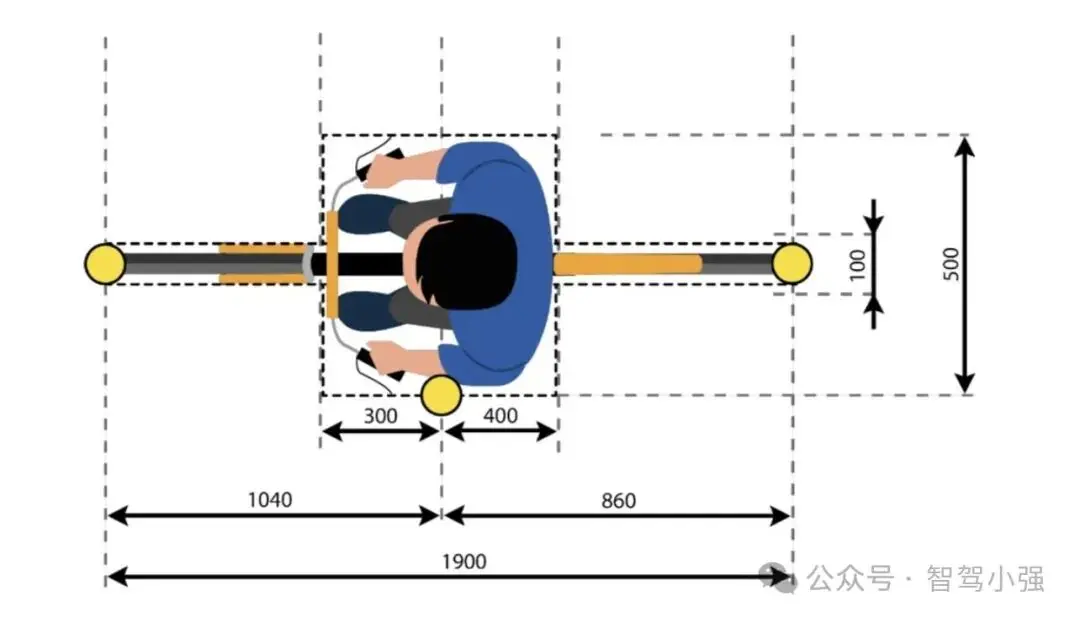
1.6.1.4 摩托车骑行者软目标EMT
下图为该虚拟框的尺寸示意图,参考点分别设置于:
· 前轮最前端(用于纵向-前、转弯及横穿场景)· 后轮最后端(用于纵向-后场景)
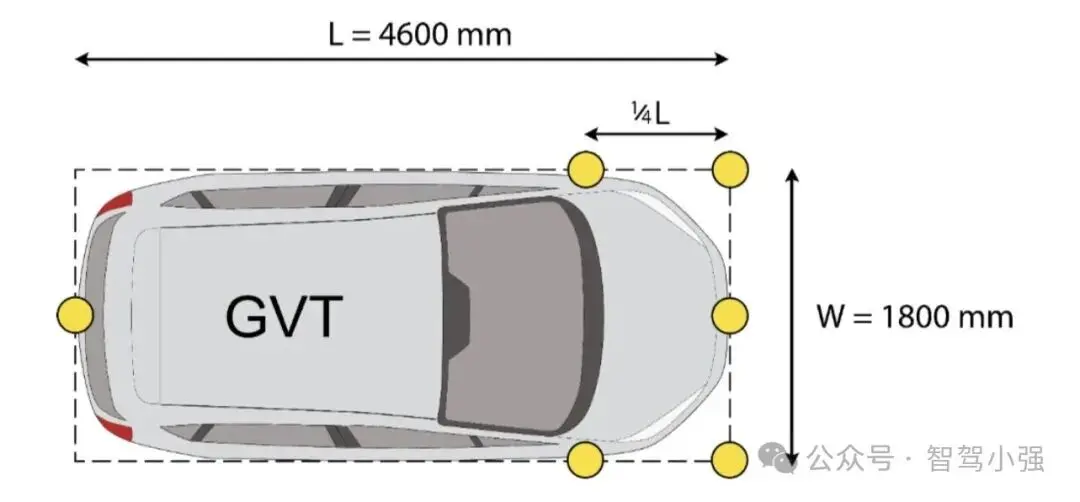
1.6.1.5 乘用车软目标GVT
GVT 的虚拟框如下图所示,参考点位于:
· 前端轮廓的最前端(中心点 1 个,前端轮廓与两侧轮廓交点各 1 个)
· 后端轮廓的最后端(中心点)· 沿 GVT 每侧长度的 75% 处
 1.7 测量与变量所有动态数据采样与记录频率不得低于 100 Hz。使用 DGPS 时间戳将目标数据与 VUT 数据同步。
1.7 测量与变量所有动态数据采样与记录频率不得低于 100 Hz。使用 DGPS 时间戳将目标数据与 VUT 数据同步。
DGPS即差分全球定位系统,详见前文:
一文讲清全球定位系统GPS
1.7.1 变量
T:时间
T0:测试开始的时间。除非另有说明T0=TTC 4s
转弯场景:T0是在Tsteer的前1s
制动场景:T0是在TTarget_deceleration_start的前1s
横穿场景:T0是目标加速阶段后0.5s
TAEB:AEB激活的时间
TFCW:FCW激活的时间
Timpact:VUT碰撞/接触目标物的时间
Tsteer:VUT进入曲线段位置的时间
TTarget_deceleration_start:目标物开始减速的时间
Vimpact:VUT碰撞/接触目标物时的速度
Vrel_impact:VUT碰撞/接触目标物时的相对速度
XVUT,YVUT:整个测试期间VUT的位置
VVUT:整个测试期间VUT的速度
AVUT:在整个测试期间,VUT的加速度
ψVUT:在整个测试期间,VUT的偏航速度
ΩVUT:在整个测试期间,VUT的方向盘转速
Xtarget,Ytarget:整个测试期间目标物的位置
Vtarget:整个测试期间目标物的速度
Atarget:在整个测试期间目标物的加速度
ψtarget:在整个测试期间目标的偏航速度
1.7.2 测量精度
为VUT和GVT配备数据测量和采集设备,数据采集和记录精度至少为:
VUT和目标物速度精度为:0.1 km/h;
VUT和目标物横向和纵向位置精度为:0.03 m;
VUT方向角度精度为:0.1 °;
VUT和目标物偏航率精度为:0.1 °/s;
VUT和目标物纵向加速度精度为:0.1 m/s²;VUT方向盘转速精度为:1.0 °/s。
1.7.3 数据滤波
过滤测量数据如下:
位置和速度不需过滤,而是在原始状态下使用。加速度、偏航率、方向盘速度和力由12极相位的Butterworth滤波器过滤,截止频率为10Hz。
2. 测试条件
2.1试验跑道
在干燥(表面无可见水分)、均匀、坚实的铺装路面进行测试,纵向坡度 ≤ ±1%,横向坡度 ≤ ±3%。路面峰值制动系数(PBC)≥ 0.9。
在测试结束前,车辆前方 20 m 以及测试路径左右各 5 m 范围内,不得存在任何可能导致传感器异常测量的路面缺陷(如大坑、裂缝、井盖、道钉等)。
除非另有规定,从 T0 到测试结束,车辆前方 20 m 及 VUT 与目标连线视轴内,不得有其他车辆、基础设施(低照度测试时路灯柱除外)、障碍物、物体或人员。
测试区域前方及两侧整体视野不得出现高反光表面,也不得有与测试目标形状相似的剪影。
2.1.1 车道标线
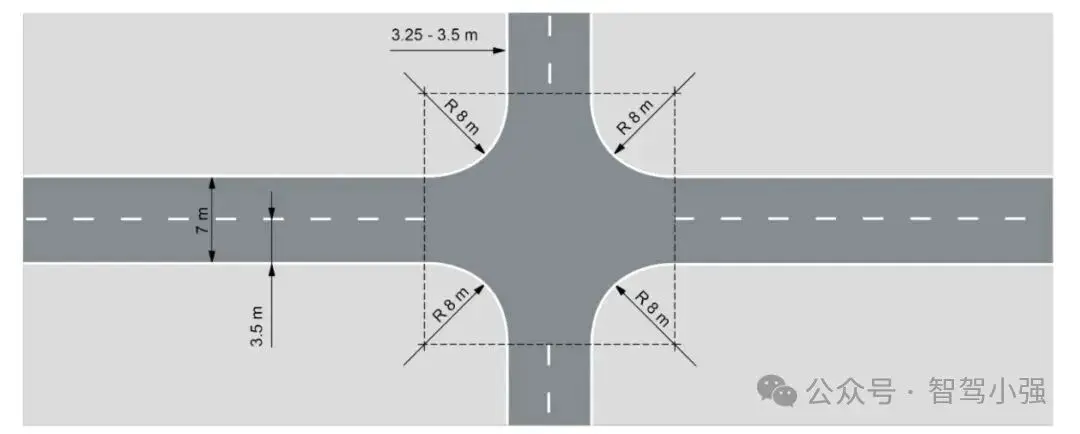
AEB 测试允许存在车道标线,但测试路径左右各 3 m 范围内不得出现与测试路径平行的典型车道线。允许标线横穿测试路径,但在预期 FCW 激活和/或 AEB 制动区域内不得出现任何横穿标线。
若场景需在路口进行,如上图所示:
• VUT 起始主车道宽 3.5 m;
• 侧向车道宽 3.25–3.5 m;• 路口标线须符合 UNECE R130:虚线(线宽 0.10–0.15 m)、实线(线宽 0.10–0.25 m);
• 路口中心无标线。
2.2 天气条件
• 干燥天气,环境温度 5–40 °C;
• 无降水,地面水平能见度 > 1 km;
• 风速 < 10 m/s,以减少对目标及 VUT 的扰动;• 自然光照均匀,白天测试光照 ≥ 2000 lux,除 VUT 或目标阴影外无强阴影;避免正对或背向直射阳光行驶;
• 每单次测试开始前或至少每 30 min 记录:
– 环境温度(°C)
– 路面温度(°C)
– 风速/风向(m/s)– 环境照度(lux)
2.3 周边环境
从 T0 到测试结束,车辆前方 20 m 以内:
– VUT 路径左右各 5 m;
– GVT 周围圆圈;– VUT 几何中心与 GVT 圆周之间的视轴;不得有任何突出于路面的车辆、基础设施(低照度测试时照明柱除外)、障碍物、物体或人员。
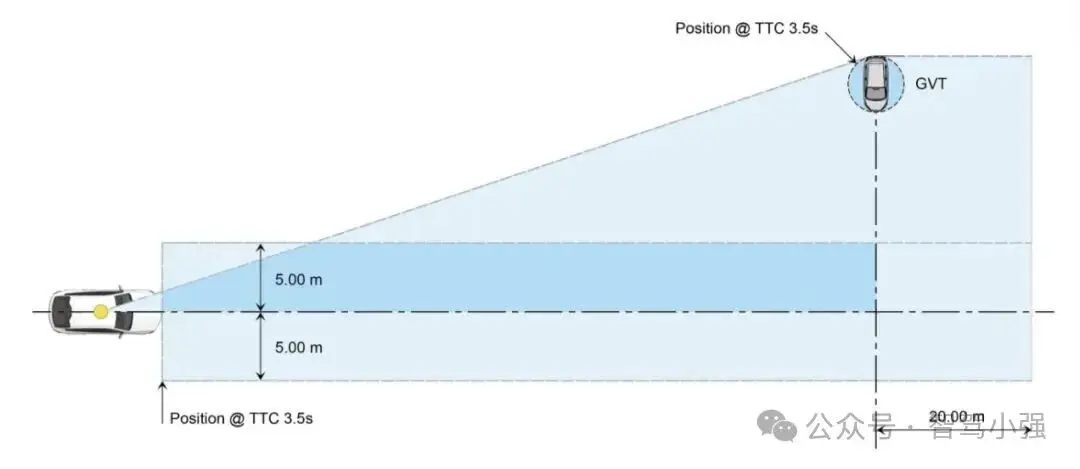
对于 CCCscp 场景,上述要求从 TTC = 3.5 s 开始执行。
禁止在需穿越高架标志、桥梁、门架或其他显著结构的区域测试。
测试区域前方及两侧必须为单一人工或自然环境(如延伸路面、纯色围栏、自然植被或天空等),不得有高反光表面或车辆状剪影。
2.4 VUT 准备
2.4.1 系统设置将 AEB 和/或 FCW 系统所有可驾驶员调节项(如碰撞预警时机、制动强度)设为中档或次最高档,示例见下图。
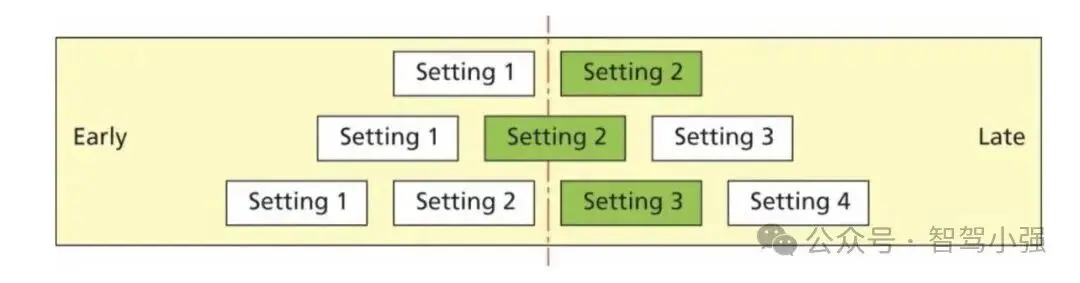
若车辆配备根据驾驶员状态(分心/专注)调整 AEB/FCW 灵敏度的 DSM,测试前必须关闭。
若车辆配备可展开的行人/VRU 保护系统,测试前必须关闭。
2.4.2 轮胎
使用车辆制造商指定的原装新胎(品牌、型号、尺寸、速度/负荷指数一致)。
允许更换由制造商或其授权经销商提供的、规格完全相同的轮胎。
按制造商推荐的冷胎气压充气,采用最小正常载荷对应气压。
按轮胎磨合程序运行轮胎,并在整个测试期间保持轮胎安装位置不变。
2.4.3 四轮定位及整备质量
在整备质量状态下进行四轮定位检查并记录 OEM 设定值。
• 如适用,将燃油加至油箱容量的至少 90%。
• 检查并补充机油及其他油液至最高液位。
• 确保备胎及随车工具齐全,车内不得有其他物品。
• 按制造商规定的气压充气。
• 测量前后轴质量并计算总质量,即为“整备质量”(unladen kerb mass),记录在测试详情中。• 按“整备质量 + 200 kg 车内载荷”计算所需配重:200 kg 减去驾驶员及设备质量。
2.4.4 车辆整备
安装车载测试设备、仪器、电缆、接线盒及电源,并按计算配重放置载荷(沙袋/砝码),所有物品必须牢固固定。
驾驶员就位后,再次称取前后轴载荷,并与“整备质量”对比。
车辆总质量须为整备质量 + 200 kg 的 ±1%;前后轴载荷分配须为整备质量 + 满油前后轴载荷分配的 ±5%。
如不符,可移除或增加对性能无影响的物品;新增配重必须固定牢靠。
增减质量时尽量保持与原车惯性特性一致,最终轴载荷记录在测试详情中,并记录“测试状态”下的轴重。
来源:智驾小强






