eVTOL(电动垂直起降飞行器)正在成为低空经济的明星技术。无论是通勤、物流还是城市空中出行,要让这类“会飞的电动车”真正安全可靠,核心问题就是功率和能量的供给。今天我们来聊聊:一架eVTOL,从“能不能飞起来”到“能飞多远”,背后需要怎样的功率需求计算、能量需求。

01、飞行剖面
对于电动垂直起降飞行器(eVTOL)而言,不同飞行模式下的功率需求存在显著差异,因此准确计算其功率及能量特性的关键前提是深入理解各类飞行模式的特点。eVTOL的典型飞行剖面通常可细分为5个核心阶段,具体包括初始悬停、起飞爬升、巡航飞行、下降过渡及着陆悬停。各阶段的气动环境与动力需求有所区别。基于此,eVTOL的功率及能量计算分析需依托飞行剖面的阶段分解展开,通过分别量化各阶段的动力需求,最终实现全飞行过程的能量特性精准评估。
02、能量及功率计算分析
接下来,小编将介绍一种适用于基于螺旋桨推进的eVTOL功率及能量计算的方法。本计算方法可适用于无翼布局(例如 Volocopter 公司的 Volocity 多旋翼机)以及固定翼设计,例如峰飞 V2000CG,但采用管道矢量推力推进系统的 eVTOL(如 Lilium Jet)不适应本方法,因为其推进特性和上述机型有显著差异。根据上文飞行剖面的分解,可以知道总能量需求可确定为: 其中Ehover、Etake、Ecruise、Edesent和Elanding分别表示初始悬停、起飞、巡航、下降和着陆阶段的能量需求。对于每个阶段,能量需求的计算公式为:
其中Ehover、Etake、Ecruise、Edesent和Elanding分别表示初始悬停、起飞、巡航、下降和着陆阶段的能量需求。对于每个阶段,能量需求的计算公式为: 其中Pphase表示功率需求,Tphase表示飞行模式持续时间各阶段功率计算公式如下:初始悬停阶段:
其中Pphase表示功率需求,Tphase表示飞行模式持续时间各阶段功率计算公式如下:初始悬停阶段: 其中MTOW为飞机的最大起飞重量,等于飞机重量与载荷之和;g为地球的重力加速度;nh为飞机悬停效率。该参数量化了飞机相对于所需能量或功率维持空中静止状态的能力。其数值受旋翼叶片设计、空气动力学效率、叶片表面特性及飞机内部整体系统损耗等因素影响。对于大多数电动垂直起降飞行器(eVTOL),其数值通常介于0.6至0.7之间。参数aw表征旋翼系统在悬停或垂直飞行时尾流收缩程度,对于电动VTOL等采用开放式螺旋桨的机型,该值等于2。空气密度p为1.2 kg/m³,而开放式螺旋桨的总旋翼面积A r计算公式为:Ar = xp · π · r2p;其中xp是螺旋桨数量,rp是螺旋桨半径。起飞阶段:垂直爬升时的功率(考虑诱导速度影响)
其中MTOW为飞机的最大起飞重量,等于飞机重量与载荷之和;g为地球的重力加速度;nh为飞机悬停效率。该参数量化了飞机相对于所需能量或功率维持空中静止状态的能力。其数值受旋翼叶片设计、空气动力学效率、叶片表面特性及飞机内部整体系统损耗等因素影响。对于大多数电动垂直起降飞行器(eVTOL),其数值通常介于0.6至0.7之间。参数aw表征旋翼系统在悬停或垂直飞行时尾流收缩程度,对于电动VTOL等采用开放式螺旋桨的机型,该值等于2。空气密度p为1.2 kg/m³,而开放式螺旋桨的总旋翼面积A r计算公式为:Ar = xp · π · r2p;其中xp是螺旋桨数量,rp是螺旋桨半径。起飞阶段:垂直爬升时的功率(考虑诱导速度影响) 其中,v take-off表示爬升速度,υI表示诱导速度,为平均转子流入速度与流出速度之差,其计算公式为:
其中,v take-off表示爬升速度,υI表示诱导速度,为平均转子流入速度与流出速度之差,其计算公式为: 巡航阶段:
巡航阶段:
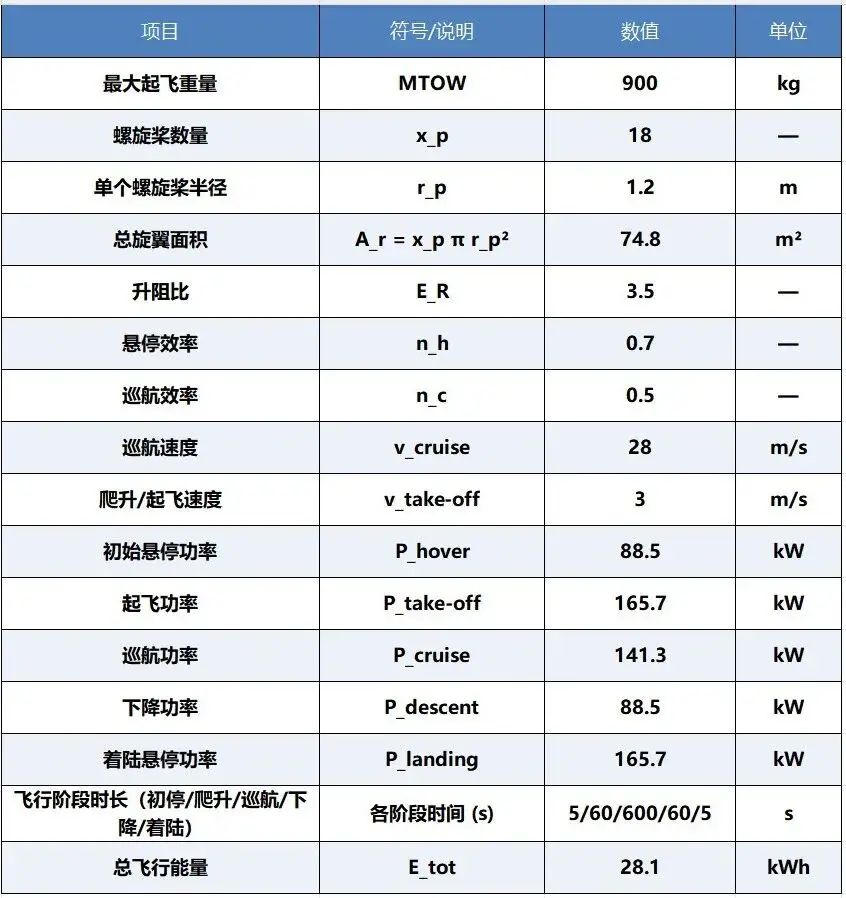
其中ER表示升阻比,该参数用于衡量飞机的空气动力学效率,具体反映其产生的升力与空气阻力的比例关系,数值通常介于4到15之间。vcruise作为巡航速度指标,nc则代表巡航效率,用于量化飞机在保持平飞状态时的能耗控制效果。根据具体机型设计差异,该参数值通常在50%至60%之间浮动。下降阶段则通常与初始悬停的功率相同;着陆悬停的功率与起飞阶段的功率相同。03具体案例分析以Volocapter的Volocity为例,我们通过公开的相关型号数据可以得到大部分功率计算参数,悬停和巡航效率值及升阻比的相关数据参考了Hagag等所发表的文章“Maximum total range of eVTOL under consideration of realisticoperational scenarios” 内的相关内容。Volocity最大起飞重量设定为900kg,根据初步计算可以知道其起飞功率为165.7kW,巡航功率为约为141.3kW,起飞/下降功率为88.5kW。基于上述功率数据,可得出时长为12min的飞行需要的电量约为28.1度。

04、总结与启示
功率需求是eVTOL的“起点”,任务剖面让功率转化为能量需求,而电机/电池 的选择和匹配则把这些计算落到硬件方案。正是这条链路,决定了eVTOL究竟能不能既安全起飞,又经济运行。合理的计算逻辑和分析,可以帮助我们更好地选型和匹配开发需求。eVTOL的功率需求和飞行重量相关性较大,我们也可以通过上述的计算方法初步确定不同重量下的eVTOL的功率需求。
来源:eVTOL电池













