1.背景&定义&测试设备
2.测试条件
3.测试程序
4.测试执行
5.评估标准和评分
4.测试执行
4.1 一般测试行为
如果车辆制造商要求,可以在每次测试运行前进行初始化运行。比如:使VUT停止,将制动踏板踩到底并松开。
对于自动变速器的车辆,请选择D档。对于手动变速器的车辆,请选择最高档位,在测试速度下,发动机转速至少为1500r/min。如适用,在轮胎磨合后的90s到10min之间进行第一次测试,并在同一时间段后进行后续测试。如果连续测试之间的时间超过10分钟,需要在72km/h的速度下,以大约0.3g的减速度执行三次制动刹停。
在测试之间,操纵VUT的最高速度为50km/h,过程中避免剧烈加速、减速、制动或转弯,除非为了保持安全的测试环境而绝对必要。
对于所有基于OEM提供的GRID预测进行评估的AEB和FCW测试场景,将随机选择要测试以验证制造商预测的实际网格单元,其分布符合预测的颜色分布。
对于行人和自行车骑行者的FCW系统测试,根据OEM的预测,测试每个场景中在TTC≥1.7s时发出FCW的最高测试速度,加上在TTC≥1.7s时发出FCW的每个场景中随机选择一个测试速度。
如果在这些测试中没有TTC≥1.7s时发出FCW的速度,则以10km/h的增量在场景剩余的所有测试速度下执行测试。
4.2 制造商预测
4.2.1 制造商提供的数据
车辆制造商需要向ENCAP秘书处提供标准场景和扩展场景中的每个表格适用的彩色数据(不需要预期碰撞速度)的车辆性能预测。制造商还需要向ENCAP秘书处提供其车辆可以成功克服的每个适用的鲁棒性层的性能声明。
制造商应在任何测试开始前提供信息,最好是在交付测试车辆时提供。
4.2.2 制造商数据缺失
如果没有性能预测,请按照以下概述进行备份程序:
4.2.2.1 车对车和车对摩托车后部CCR/CMR
标准场景:
a. 随机选择100%或0%碰撞位置场景,以最低的VUT测试速度开始测试。当完全避撞时,随后的测试速度以20km/h的增量递增。当有碰撞时,首先以比发生碰撞的测试速度低10km/h的测试速度进行测试。测试结束后,继续以10km/h的速度增加进行剩余的测试。当测试中出现减速低于5km/h,或连续两次测试速度的相对碰撞速度大于20km/h时,停止测试。
b. 继续进行75%或25%的碰撞位置测试场景(分别取决于最初是100%还是0%)。以该场景的最低测试速度或100%(或0%)位置的最高避撞速度开始测试,以较大者为准。按照a.中的描述增加后续测试速度。
c. 继续进行50%的碰撞位置测试场景。以场景的最低测试速度或75%(或25%)位置的最大避撞速度开始测试,以较大者为准。按照a.中的描述增加后续测试速度。
d. 对于FCW系统测试,请遵循a至c中概述的AEB测试流程。仅在AEB功能测试中没有避撞的测试速度下进行测试。
e. 为了确保对称性,请重新测试100%和75%位置处的最高避撞速度。如果性能有差异,则在0%和25%的碰撞位置进行所有测试。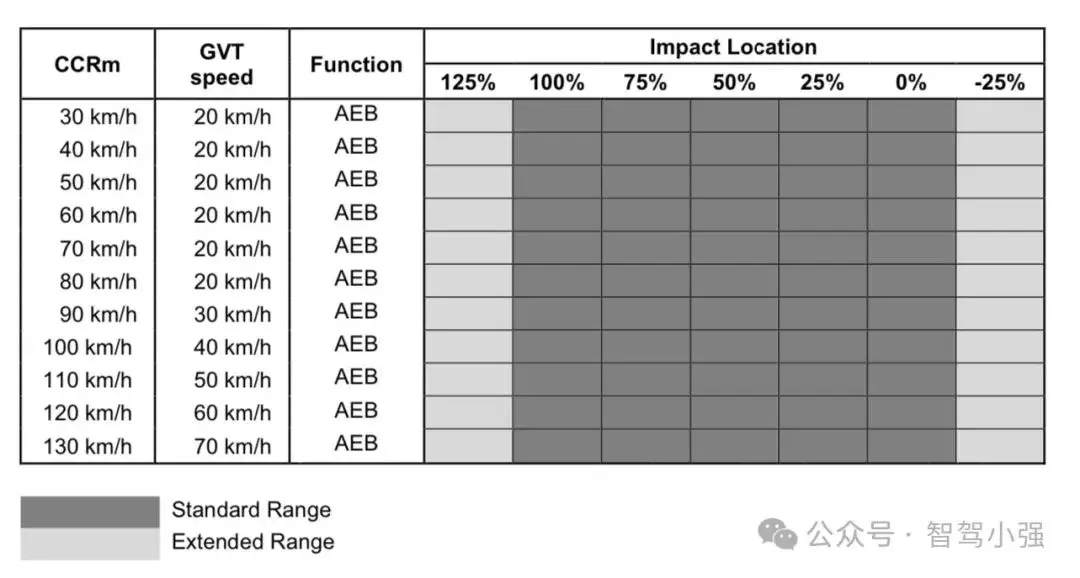
扩展场景:
测试125%和-25%的碰撞位置的速度范围,以最低的VUT测试速度开始测试。当完全避撞时,随后的测试速度以20km/h的增量递增。
当有碰撞时,首先以比发生碰撞的测试速度低10km/h的测试速度进行测试。测试结束后,继续以10km/h的速度增加进行剩余的测试。
当测试中看到的减速低于5km/h,或连续两次测试速度的相对碰撞速度大于20km/h时,停止测试。
4.2.3 仿真测试评估VTA
在使用VTA的情况下,将按照ENCAP的VTA协议的概述提供仿真测试报告。
使用驾驶员输入或使用可以调制的替代控制系统来控制VUT,以在AEB测试的边界内进行必要的测试。
4.2.4 AEB测试 将VUT和目标加速到相应的测试速度。测试应从T0开始,当在T0和TAEB和/或TFCW之间满足所有边界条件时有效:
评估AEB功能以及CMRs的FCW和CMRb的FCW时,当以下情况之一发生时,考虑测试结束:
VVUT=0km/h(横穿)或VVUT=Vtarget(纵向);
VUT和目标的接触(碰撞);
目标已离开VUT路径或VUT已离开目标路径。
评估FCW功能时,当出现以下情况之一时,考虑测试结束:
VVUT=Vtarget(纵向);
TFCW;
TTC≤1.5s,之后可以开始规避动作。
实验室有权选择并使用上述选项之一,以确保安全的测试环境。
为了避免交叉路口场景中的碰撞,测试实验室可能会在AEB系统未能(充分)干预的情况下使用转向机器人的自动制动动作。此制动动作在以下情况下自动应用:
VUT即将到达对车辆施加最大制动才能阻止止VUT进入摩托车骑手路径的位置,但未检测到来自AEB系统的干预。
在AEB干预期间/之后,VUT和EMT之间的横向距离≤0.3m时。
测试实验室可自行决定选择和使用上述选项之一,以确保安全的测试环境。如果OEM认为规避行为对其车辆的性能产生负面影响,他们应咨询测试实验室和ENCAP秘书处。对于手动或自动油门控制,需要确保在自动制动过程中油门踏板不会导致系统超控。当初始测试速度降低5km/h时,不应踩油门踏板。测试期间不得操作其他驾驶控制,例如离合器或制动踏板。这不适用于CPRA测试。
CMRs和CMRb的FCW系统测试应使用制动机器人对警告做出反应,延迟时间为1.2秒,以考虑驾驶员的反应时间。
在非威胁情况下,制动将导致最大制动水平为-4 m/s²-0.50 m/s²。制造商应指定要应用的特定制动曲线(以200ms[最大400mm/s]施加的制动踏板应用速率和踏板力)。当制造商提供的制动曲线导致制动水平高于允许的制动水平时,将应用附件C中描述的迭代步骤将制动水平缩放至-4 m/s²-0.50 m/s²。
如果没有提供制动配置文件,应用附件C中描述的默认制动配置文件。
5.评估标准和评分
5.1 —般要求
为了有资格在此评估中得分,AEB和/或FCW系统应: 在每次旅程开始时,系统默认开启,并且不应通过短暂的单次按下按钮来停用系统。 FCW系统的报警音应响亮清晰。
对于AEB行人,系统应在CPNA-75场景下以10km/h的速度在白天和晚上运行(即警告或制动)。此外,系统应能够检测并响应以3km/h的速度行走的行人,在CPNA-75白天&夜晚场景下,VUT在20km/h时,系统应能够检测以3km/h的速度行走的行人,并减速。 对于AEB CCRs场景,当测试速度不超过20km/h时,所有重叠的情况都应能避撞,并通过一个随机选择的碰撞点进行验证。5.2 评估方法车辆制造商应向ENCAP提供彩色数据,详细说明所有测试场景中AEB/FCW系统的预测性能。预测性能将用作参考,使用随机选择的验证测试来验证性能。
本评估中的每个场景都由一个矩阵组成,该矩阵结合了车辆纵向速度和撞击位置或目标纵向速度的范围。引用矩阵中的每个组合作为网格单元。形成矩阵的网格单元被分为2组:标准范围和扩展范围。示例:
此外,系统鲁棒性的每个场景都会获得一些分数,鲁棒性层根据有性能的标准范围的网格单元格进行评估,如5.3.1中所述。
5.2.1 标准范围
对于标准范围的分数计算,首先每个网格单元格获得1分的分数,然后根据车辆制造商的预测,根据5.2.4中描述的颜色代码标准进行缩放;其次,将所有网格单元格相加得出的子分数归一化为每个标准范围的最大可用分数(四舍五入到百分之一)。
5.2.2 扩展范围
为了有资格在扩展范围内得分,标准范围内的总可用得分应≥25%。
对于扩展范围的分数计算,首先,根据车辆制造商的预测,每个通过5.2.4中描述的验收标准的网格单元格获得1分;其次,将所有网格单元格相加得出的子分数被归一化为每个标准范围的最大可用分数(四舍五入到百分之一)。 最后,给定场景中每个扩展范围的总分计算如下: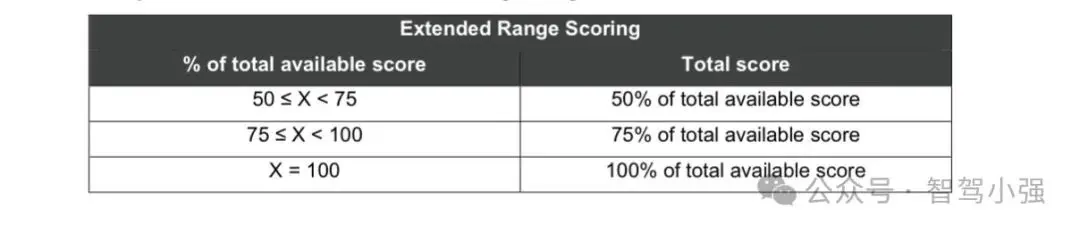
每个扩展场景中,得分超过50%才有资格得分。
5.2.2.1 自动紧急转向AES
对于扩展范围中的碰撞位置,车辆制造商可以实施AES功能,通过车道转向提供完全避让。车辆制造商应向ENCAP详细说明AES功能策略,并提供特定的测试方法来验证性能,该方法应由测试实验室进行验证。 5.2.2.2 紧急转向辅助ESS 对于以下情况,车辆制造商可以实施ESS功能,通过支持驾驶员发起的转向操作来提供完全的避撞:速度≥60km/h的CCRs和CMRs:
远侧/近侧转向避免(车道内)→撞击位置:-25%,125%;
远侧转向回避(部分变道*)→撞击位置:0%,25%,50%。
速度≥50km/h的CPLA和CBLA:
远侧/近侧转向回避(车道内)→撞击位置:10%,90%;
远侧转向回避(部分变道*)→撞击位置:25%,50%。
*只有当ESS能够评估相邻车道的可用空间时,才允许部分变道。如果车道被对向/超车目标占用,则性能标准应基于标称条件(例如纵向VRU的>1.7s TTC时的FCW/AEB的速度降的颜色代码)。
车辆制造商应向ENCAP详细说明ESS功能策略,并将提供特定的测试方法来验证性能,该测试方法应由测试实验室进行。
来源:智驾小强






