智能汽车是汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业形态。当前, 我国智能汽车产业进入快车道, 技术创新日益活跃, 新型应用蓬勃发展, 产业规模不断扩大,而相应的测试技术体系也在不断完善, 推动产业进步。本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
注:本文节选自《智能汽车测试技术》第五章节,由机械工业出版社于2025年6月份出版
https://mp.weixin.qq.com/s/yDWjOAiGJ-hl-KPBG8ni5Q
《智能汽车测试技术》目录
第1 章
导论
1.1 背景与需求/ 001
1.2 基本概念/ 003
1.2.1 测试与评价的基本概念/ 003
1.2.2 产品全生命周期中的测评技术/ 004
1.3 现状与挑战/ 005
1.4 本书章节安排/ 006
第2 章
智能汽车
测评概述
2.1 测评需求分析/ 009
2.1.1 安全性测试与验证/ 009
2.1.2 智能性测试与评价/ 012
2.2 测试方法论/ 015
2.2.1 安全性测试验证框架/ 015
2.2.2 智能性测试评估框架和体系/ 017
2.3 测试工具链及应用要求/ 023
2.3.1 测试工具链/ 023
2.3.2 测试需求与测试工具的适配性/ 027
2.4 本章小结/ 029
参考文献/ 030
第3 章
智能汽车
测试场景
3.1 场景基本概念/ 031
3.2 场景体系/ 033
3.2.1 场景要素与属性/ 033
3.2.2 场景层级/ 035
3.2.3 场景分类/ 036
3.3 场景生成方法/ 037
3.3.1 基于形式化描述的场景生成方法/ 037
3.3.2 基于驾驶员模型的场景生成方法/ 040
3.3.3 安全关键场景生成方法/ 048
3.4 场景采集与利用/ 051
3.4.1 场景采集技术/ 051
3.4.2 场景库搭建/ 052
3.5 本章小结/ 052
参考文献/ 053
第4 章
环境感知
系统的测试
技术与方法
4.1 环境感知系统测试需求分析/ 055
4.2 环境感知系统介绍/ 057
4.2.1 感知系统/ 057
4.2.2 硬件模组/ 058
4.2.3 认知算法/ 058
4.3 环境感知系统测试技术框架/ 059
4.4 各类感知环境介绍/ 060
4.4.1 封闭场地环境/ 060
4.4.2 道路交通环境/ 064
4.4.3 虚拟仿真环境/ 066
4.5 数据生成模型介绍/ 069
4.5.1 降雨图像生成方法概述/ 070
4.5.2 降雨图像生成模型介绍/ 071
4.5.3 降雨图像生成模型结果/ 075
4.6 具体测试案例/ 076
4.6.1 案例一:基于封闭场地环境的感知系统测试/ 076
4.6.2 案例二:基于虚拟仿真环境的硬件模组测试/ 078
4.6.3 案例三:基于虚拟仿真环境的感知系统测试/ 081
4.6.4 案例四:基于三类感知环境和数据生成模型的
认知算法测试/ 083
4.7 本章小结/ 086
参考文献/ 087
第5 章
决策规划
系统的测试
技术与方法
5.1 决策规划系统的测试需求与挑战/ 089
5.1.1 测试需求/ 089
5.1.2 测试挑战/ 090
5.2 基于场景的测试技术与方法/ 092
5.2.1 静态试验设计测试方法/ 092
5.2.2 动态试验设计测试方法/ 094
5.3 基于真实里程的测试技术与方法/ 101
5.3.1 开放道路测试技术/ 101
5.3.2 重要度采样加速测试方法/ 103
5.4 基于虚拟里程的测试技术与方法/ 104
5.4.1 虚拟里程测试系统组成框架/ 105
5.4.2 用于虚拟里程测试的NPC 模型生成方法/ 106
5.4.3 用于虚拟里程测试的NPC 模型性能验证/ 113
5.4.4 虚拟里程测试的应用/ 118
5.4.5 小结/ 130
5.5 其他测试技术/ 131
5.5.1 自动化测试技术/ 131
5.5.2 错误注入测试技术/ 139
5.5.3 分布式自动化测试技术/ 152
5.6 本章小结/ 157
参考文献/ 157
第6 章
整车测试
技术与方法
6.1 整车测评需求分析/ 159
6.2 封闭测试场地平台/ 160
6.2.1 封闭测试场/ 160
6.2.2 动态模拟目标物系统/ 162
6.2.3 定位与数据采集系统/ 163
6.3 开放道路测试系统/ 164
6.3.1 测试方案制定/ 165
6.3.2 数据采集与数据闭环系统/ 165
6.4 本章小结/ 166
第7 章
智能汽车
安全性评估
7.1 基于具体场景的安全性评估/ 169
7.1.1 场景瞬时风险评估方法/ 170
7.1.2 多阶段安全评估/ 180
7.1.3 单个测试场景结果外推/ 181
7.2 基于逻辑场景的安全性评估/ 182
7.2.1 评估要求/ 182
7.2.2 面向逻辑场景评价的危险域识别方法/ 183
7.3 针对被测功能的安全性评估/ 192
7.4 本章小结/ 192
参考文献/ 193
第8 章
智能汽车
综合行驶
性能评估
8.1 测评需求与研究现状/ 195
8.1.1 测评需求/ 195
8.1.2 研究现状/ 195
8.2 测评基本流程/ 197
8.3 典型测试场景矩阵/ 198
8.4 测试方法与流程/ 199
8.4.1 测试方案/ 199
8.4.2 背景车跟驰模型/ 199
8.4.3 测试数据输出/ 201
8.5 评价方法与流程/ 202
8.5.1 评价体系/ 202
8.5.2 评价流程/ 204
8.6 测评示例/ 206
8.7 本章小结/ 209
参考文献/ 209
附 录
附录A 测试工况参数设置/ 210
附录B 背景车跟驰模型/ 212
附录C 归一化方法/ 214
附录D 常见缩写词/ 216
自动化测试技术能实现场景自动化生成与仿真, 有效提高测试效率。
5. 5. 1 自动化测试技术
本节介绍一种面向决策规划系统的自动化测试技术, 该技术能够实现场景自动化生成与自动化仿真, 具体的设计原理及实现方法如下。
首先, 该技术使用了一种普适的场景自动化生成方法, 分别对功能场景、逻辑场景和具体场景进行结构化定义, 并确定了各层级之间的映射关系。其次,该技术基于各层场景的映射关系, 对应具体场景文件格式, 利用具体场景编译器实现功能场景至具体场景文件的自动化生成。然后, 该技术基于决策规划系统场景测试的需求, 利用仿真软件实现自动化仿真。最后, 基于自动化测试技术与加速测试方法相结合, 构建场景加速测试技术。
1 . 结构化场景模型定义
第3 章提到了基于要素划分的六层场景本体模型和基于抽象层级划分的三层场景模型, 为了实现决策规划系统的自动化测试, 需要分别对三层场景进行结构化定义, 以实现逐层细化的自动化生成方法。功能场景以语义形式描述,为保证功能场景的结构化, 基于六层场景本体模型定义面向决策规划系统的功能场景。针对决策规划系统的测试需求, 其必需的输入为第一层的道路拓扑结构、第二层的交通环境信号、第三层的临时障碍物和第四层的交通参与者等信息(包括自车在内的静态和动态交通参与者的位置与动作信息)。基于此, 在自动化测试技术中, 面向决策规划系统测试的功能场景定义为一定道路拓扑结构和交通环境信号条件下的自车与其他障碍物以及交通参与者的不同位置和动作的组合。
逻辑场景将功能场景涉及的要素抽象为多个参数,并定义其取值范围,由此形成参数空间。为保证逻辑场景与功能场景对场景要素定义方面的一致性,对逻辑场景的结构化描述基于六层场景本体模型对各层要素的定义。针对决策规划系统,各层级要素及相关参数见表5-18。
表5-18 面向决策规划系统的场景各层级要素及相关参数
对于交通参与者层中的动作参数,由于不同交通参与者动作特征不同,首先对自车和其他交通参与者的动作类别进行划分并给出相应参数,见表5-19。目前,有关车辆动作类别的分析已有较多研究,其中智能汽车所有动作可视为在全局路径规划下基于环境感知和自车状态所做的决策规划结果,统一称为自动驾驶动作,对应参数为全局路径规划所需的目的地坐标。基于Rigolli对驾驶员动作的分解[21],可以将人类驾驶汽车动作分为加速、减速、匀速、左换道、右换道、左转、右转等原子动作。其中,换道和转弯的相关动作模型多基于轨迹和时间[22],由于轨迹种类较多,可根据仿真软件具体设定,故采用持续时间作为统一的动作参数。其中,匀速动作对应速度参数,加/减速动作离散为多段匀加/减速过程,对应参数为加/减速度和持续时间。此外,由于非车辆的交通参与者(如行人或动物)的行为自由度较高,难以对其动作特征进行建模,故将其动作视为多段直线行驶,划分为匀速和变速动作。
表5-19 交通参与者层级要素及相应参数
具体场景即测试用例,是仿真执行的基础,对逻辑场景定义的每个参数,在其设定范围内取定一个值,即构成具体场景。OpenX系列标准格式为仿真测试具体场景提供了完整的描述方案,其中OpenDRIVE标准描述了场景的静态部分(如道路拓扑结构、交通标志标线等);OpenSCENARIO标准描述了场景的动态部分,即交通参与者的行为及交通信号灯的相位变化等。目前OpenDRIVE、OpenSCENARIO已成为大部分自动驾驶仿真软件支持的静态地图格式和动态场景格式,例如CARLA、VTD等。因此采用OpenDRIVE、OpenSCENARIO格式作为具体场景的结构化定义。OpenDRIVE格式的文件结构如图5-34所示,分为三大类:Header、Roads和Junction,其中Header定义地图的投影方式,Roads定义道路的几何形状、车道分组等,Junction定义交叉口的道路连接情况。OpenSCENARIO格式的文件结构如图5-35所示,分为三大类:RoadNetwork、Entities、Storyboard,其中RoadNetwork定义动态场景依赖的静态地图即OpenDRIVE文件,Entities定义场景中的各对象,Storyboard定义各对象的初始状态(包括位置、速度等)及动作序列(包括动作及触发条件)。
基于上述各层场景的结构化定义,各级场景之间的映射关系如下:从功能场景转化至逻辑场景,仅需将功能场景涉及的各要素映射为相应的参数类型即可。从逻辑场景转化至具体场景,不仅需对各参数类型进行具体取值,还需将场景转化为机器可读的格式,以被仿真软件执行。因此,本节面向决策规划系统必需的场景输入要素,构建场景自动化生成方法。由于针对特定系统的场景测试中,静态场景相对单一固定,故下面将在OpenDRIVE静态场景确定的基础上,实现OpenSCENARIO格式的场景文件自动化生成。
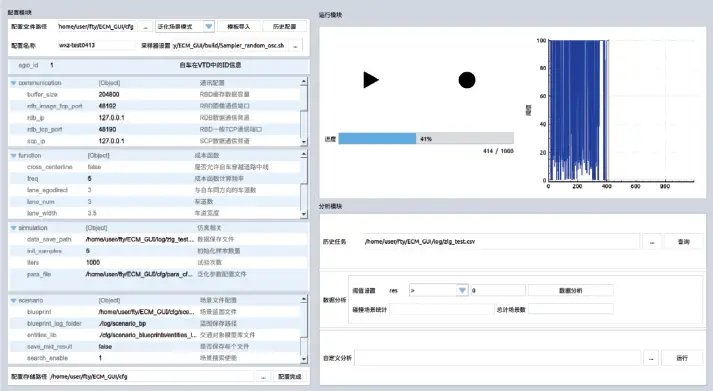
图5-34OpenDRIVE格式的文件结构
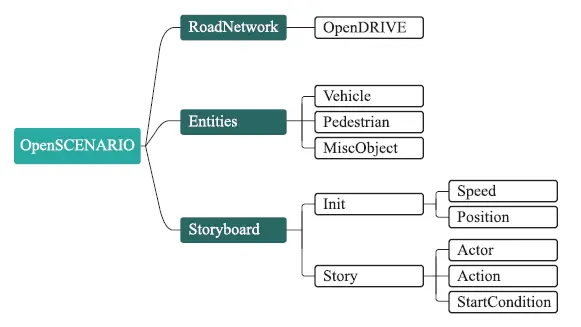
图5-35OpenSCENARIO格式的文件结构
2. 自动化测试功能实现
接下来介绍自动化测试功能的具体实现方法,开发过程在仿真软件VTD上进行。自动化测试功能实现分为两步:首先需要基于各层场景的映射关系,对应最底层的具体场景文件格式,利用具体场景编译器实现功能场景至具体场景文件的自动化生成;然后,基于决策规划系统场景测试的需求,利用VTD,基于其提供的仿真控制协议(SimulationControlProtocal,SCP)和实时数据总线(RuntimeDataBus,RDB)实现自动化仿真。控制协议方面,该技术结合相应的SCP启动和结束仿真的消息定义,实现场景的自动化运行;实时数据方面,该技术基于RDB提供的各类消息,实现测试过程中数据的自动化提取、计算与输出。
(1)场景自动化生成
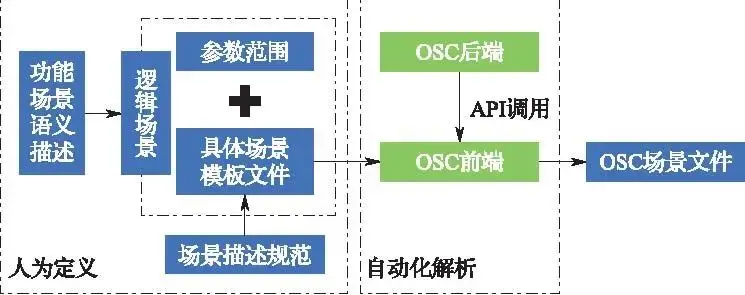
实现场景的自动化生成是实现自动化测试的第一步。由于基于可扩展标记语言格式的OpenSCENARIO格式较为底层,对应的文件描述过于复杂,人工编写OpenSCENARIO格式的场景文件耗时长、效率低。因此,该技术基于三级场景模型定义了更高级简易的接口来连接语义级别的功能场景与OpenSCENARIO格式的具体场景,使用了基于OpenSCENARIO格式的场景编译器,实现自动驾驶仿真场景文件的自动化生成。编译器原理如图5-36所示,分为人为定义和自动化解析两部分。
图5 -36 编译器原理
人为定义部分,该自动化测试技术基于三层场景逐级细化的特点,对应OpenSCENARIO格式,定义了基于JSON格式的场景描述规范。主要的场景描述规范含义及对应OpenSCENARIO层级见表5-20,与OpenSCENARIO格式中Init节点和Story节点分开编写不同,该技术定义的场景规范借鉴了面向对象编程的思想。以交通参与者为例,将同一交通参与者的初始化和动作序列作为该交通参与者的属性,归于子层级的键值对中,从而减少场景编写的工作量,同时使得对交通参与者的描述更连续,场景更易被理解。需要注意的是,自动驾驶汽车的初始位置需依据车道位置、初始相对纵向距离结合地图文件确定位置,其他交通参与者也可基于车道位置、初始相对纵向距离进行设定。
表5-20 场景描述规范含义及对应OpenSCENARIO层级

(2)场景自动化仿真
下面介绍场景的自动化仿真方法,主要包括场景自动化执行/结束及数据自动化传输等。
根据应用侧重不同,现有的自动驾驶仿真软件主要分为三类,即传统车辆仿真软件、机器人仿真软件、专用自动驾驶仿真软件。其中,传统车辆仿真软件侧重于动力学模拟,往往用于控制算法的开发。机器人仿真软件可以提供丰富的数据仿真接口,但对自动驾驶场景模型的支持不足。相较之下,专用自动驾驶仿真软件在场景模型以及仿真接口的适配方面都能提供良好的支持。本节使用VTD搭建自动化场景测试仿真平台。
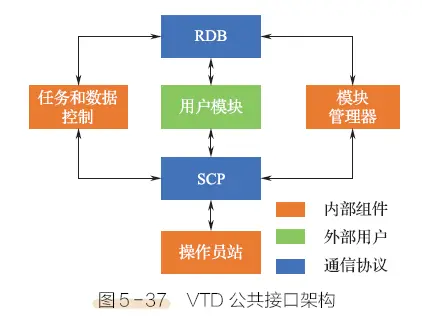
在选定仿真软件的基础上,进一步对VTD的上层控制和底层数据的通信接口进行分析。通信接口方面,VTD共包含私有接口和公共接口两大类。其中私有接口用于VTD内部组件的通信,公共接口用于外部与VTD各组件的通信。因此该技术基于VTD的公共接口,实现场景的自动化仿真。VTD公共接口架构如图5-37所示,接口间采用的通信协议分为仿真控制协议(SCP)和运行数据总线(RDB)协议,两类消息均可实现与VTD内部组件和外部用户之间的消息通信,但具体通信内容不同,分别能够实现上层控制和底层数据的通信。
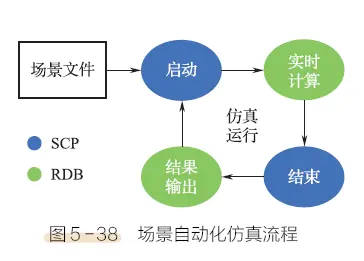
基于SCP和RDB协议,实现图5-38所示的场景自动化仿真流程,分为客户端和仿真软件两部分,具体流程为:以场景文件为输入,首先,客户端基于SCP,发送启动指令至仿真软件,场景开始运行。然后,运行过程中,客户端基于RDB协议,提取仿真软件的实时数据,计算相应指标。最后,客户端基于SCP,发送结束指令至仿真软件。同时,客户端基于RDB协议计算的数据,输出相应测试结果,再启动运行下一个场景。如此循环,实现自动化仿真流程。
3. 自动化测试技术应用
本节根据上述的场景自动化生成方法和自动化仿真方法,结合5.2节中提出的基于场景的自动化测试框架,介绍自动化测试技术在加速测试方法中的应用———自动化加速测试工具。
该自动化加速测试工具分为上位机和下位机两部分。其中上位机负责设置、发布测试任务,接收测试结果,实现与用户的交互,下位机负责测试场景的运行及仿真数据的计算。上位机的图形用户界面(GUI)分为配置模块、运行模块和分析模块三部分,如图5-39所示。配置模块界面主要负责场景参数和仿真参数的设置,其中场景参数包括场景模板文件选择、泛化参数选择及相应参数范围设置等,仿真参数包括单个仿真场景运行时长设置、场景评价指标选择、仿真数据计算频率设置等。运行模块界面主要负责优化算法的选择与启停、自动化程序的选择与启停、任务进度可视化等。分析模块主要负责加速测试结果数据的统计与分析。
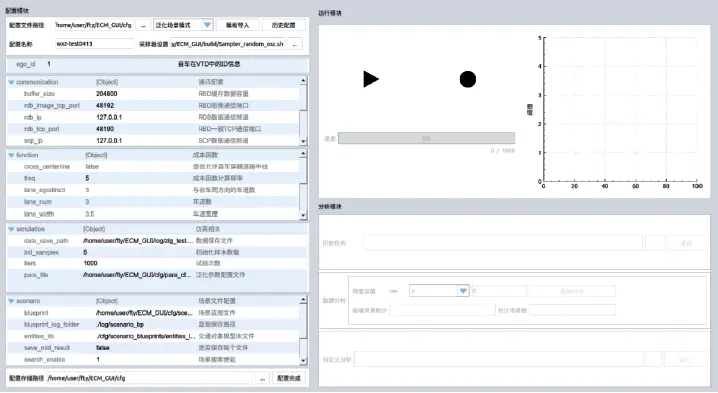
图5-39 上位机的GUI
工具运行流程如图5-40所示。第一,在上位机的配置管理的GUI中设置场景参数和仿真参数。第二,基于场景参数设置,通过任务管理的GUI选择并启动优化算法,调用相应的参数采样模块,输出具体场景参数至场景自动化生成模块,生成具体场景文件用于场景仿真。第三,基于仿真参数设置和第二步生成的场景文件,调用场景仿真模块中的客户端,通过与仿真软件的数据通信,实现场景自动化仿真与结果计算。最后,输出测试结果,基于相应的评价标准得到带有安全或危险标签的场景集,用于被测系统的安全性分析。
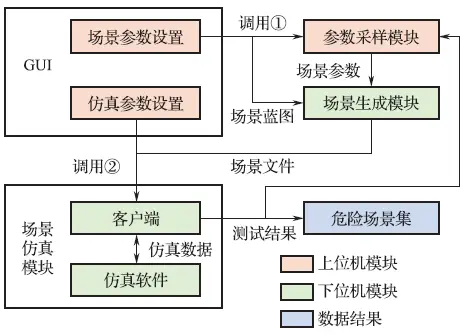
图5-40 工具运行流程
下面是一个利用自动化加速测试工具进行加速测试的例子,如图5-41所示。首先在配置模块定义了一个切出的逻辑场景,其次对相关参数进行泛化,完成相关参数配置。然后启动运行模块,工具便会自动进行1000轮测试并记录测试结果。最后在分析模块可对测试结果进行自动分析。
图5 -41 自动化加速测试工具运行实例
本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
点击以下链接购买
https://mp.weixin.qq.com/s/yDWjOAiGJ-hl-KPBG8ni5Q
作者简介:
陈君毅,2009年毕业于同济大学汽车学院,获工学博士学位,任职于同济大学汽车学院。长期从事自动驾驶汽车测试与评价方向研究工作,先后主持和参与国家级、省部级项目共11项,并与华为、路特斯、上汽大众、蔚来等企业开展了深度校企合作研究。近5年,在国内外学术期刊和国际会议上共发表SCI/EI检索论文近30篇,其中以第一作者或及通讯作者发表的为20余篇;申请发明专利30余项(已授权7项)。担任SAE汽车安全和网络安全技术委员会秘书、功能安全和预期功能安全分委会主席;是自动驾驶测试场景国际标准(ISO3450X)支撑专家组成员,以及CAICV联盟预期功能安全工作组核心成员;担任《汽车工程》和《汽车工程学报》青年编委委员,IEEE Transactions on Intelligent Vehicles、Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering、《中国公路学报》、《汽车工程》、IEEE Intelligent Transportation Systems Conference、IEEE Intelligent Vehicles Symposium等国内外期刊和国际会议审稿人,曾于多项国际学术会议担任分论坛主席。
版权信息:
智能汽车测试技术 / 陈君毅等著. -- 北京 : 机械工业出版社, 2025. 5. -- (智能汽车关键技术丛书).ISBN 978-7-111-77871-4 Ⅰ. U467 中国国家版本馆CIP数据核字第2025X8D229号
本书由机械工业出版社出版,本文经出版方授权发布。
来源:汽车测试网
作者:陈君毅等













