目前国内手动挡(Manual Transmission,MT)配置车型仍占据较大的市场,特别是各车型的中低配置,其中也有配置EPB的车型。对应这部分车型EPB的自动驶离功能,需要判断驾驶员离合踏板操作,目前的做法有:(1)采用单独的离合行程传感器;(2)采用高低位离合开关;(3)不依赖实际的离合踏板物理信号。其中:单独的离合行程传感器成本较高,目前的趋势是逐步取消;采用高低位离合开关对部分车型也需要增加一定成本,且无法准确识别离合是否结合。本文作者针对无任何离合踏板物理信号的情况,采用发动机输出参数对离合踏板状态进行识别,从而在不增加车辆生产成本的前提下,实现MT车型EPB系统可靠的自动驶离功能。
1 离合识别策略
1.1 发动机扭矩输出
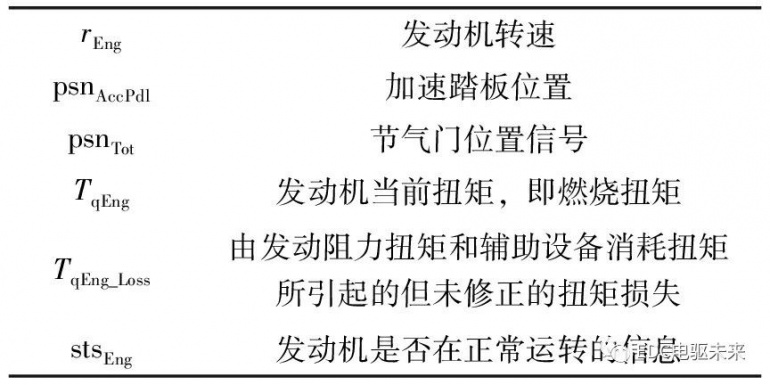
EPB在执行自动驶离功能时,需要获取发动机工作数据,目前发动机控制系统EMS(Engine Management System)都具备CAN总线功能。在发动机运行时,EMS会在总线上发出如表1所示信号。
对于自动挡车型,非空/P挡位下,踩下加速踏板后,TqEng减去TqEng_Loss的部分,近似等于驱动车辆的轮边扭矩,直接用于坡道起步逻辑判断即可。但对于MT车型,则需要额外考虑离合器是否充分结合。原因是在离合器未充分结合时释放EPB驻车制动力就可能引起车辆溜车,从而发生危险。
表1 EMS发出的CAN总线数据表

1.2 识别方法
非空挡状态下,当踩下油门后,发动机输出扭矩是否传递到驱动轮上,取决于离合器是否处于结合状态,而发动机输出扭矩未传递到驱动轮上时,扭矩会引起发动机转速快速上升到较高值。因此EPB控制软件可以从表1列出的信号来间接计算离合踏板状态的。
文中采用的识别策略是直接估算传递到轮边的有效输出扭矩,并且:
TqWheel>TqWheel_min 离合踏板结合
否则离合踏板未结合
(1)
当轮边输出扭矩>最小输出扭矩时,识别为离合踏板结合,其中最小输出扭矩TqWheel_min根据EPB自动驶离功能平顺性要求和轮边输出扭矩计算误差在实车匹配阶段定义,文中为5 N·m,而轮边输出扭矩TqWheel则是将发动机当前扭矩(燃烧扭矩)除掉各种损失扭矩,计算策略如下:
TqWheel=(TqEng-TqJ_Sys-Tqfriction-TqLoss)i
(2)
式中:i为变速箱和主减速器的减速比;TqJ_Sys为惯性环节损失的扭矩;Tqfriction为摩擦阻力损失的扭矩,其中:
TqJ_Sys=JSys·βEng
(3)
式中:JSys为系统的转动惯量,包括发动机、飞轮、离合器等系统转动部件的转动惯量;βEng为发动机转速加速度,该值由rEng差分计算而得到,即:

(4)
式中:k为换算系数;ΔT为计算周期;rEng_0为ΔT前的发动机转速。
摩擦损失的扭矩为Tqfriction,文中考虑滑动摩擦阻力和黏性摩擦阻力,并用下式拟合计算:
Tqfriction=Tq0+kq·rEng
(5)
式中:Tq0、kq为扭矩损失拟合系数。有些车型的发动机EMS,会将Tqfriction也作为扭矩损失的一部分发送到整车CAN总线上,则不需要进行该项扭矩的计算。
式(2)中的TqLoss主要包括泵气损失扭矩、附件扭矩,而其中附件扭矩又包括空调压缩机负载、发电机负载、液压助力负载;TqLoss需要根据不同车型情况进行计算,有的车型发送在CAN总线上的数据TqEng_Loss已经是计算好的扭矩损失,即TqLoss=TqEng_Loss,此时可以直接使用总线上的扭矩损失数据。
2 结果验证
2.1 实车数据
某车型的实车相应参数数据如表2所示。
表2 某车型实车参数表

2.2 计算和分析结果
图1为某车型实车所测试离合器踩到底时的发动机输出数据曲线,图中自上而下分别对应:psnAccPdl、rEng、TqEng、TqEng_Loss。

图1 离合器踩到底时的实车发动机输出曲线
可以看出,加速踏板踩下且扭矩输出后,rEng信号上升需要等待一定时间,同时考虑通过差分计算βEng引起的延时,需要将加速踏板位置变化后的TqWheel计算延迟一定时间以防止加速踏板位置变化后开始这段时间内计算值偏大。文中延迟时间设置为0.25 s,踩下加速踏板时间内,不更新离合踏板状态。
在离合未结合时,需要保证EPB不会因为踩加速踏板自动释放,这种工况下的实车测试数据和计算结果如图2所示。

图2 离合器未结合油门持续踩下时的曲线
图2中,Clutch_Cal为计算得到的离合信号,信号为1时表示离合踩到底,即未结合状态,Clutch_Real为实际的离合低位开关信号(离合松开但未结合或刚开始结合时触发该开关)。可以看出,在离合未结合的情况下,油门持续踩下时,计算的Clutch_Cal一直为1,EPB 可以识别出当前驾驶员离合踏板未结合,从而不执行自动释放功能。说明该方法具备很好的可靠性,能够保证在离合结合后才执行自动释放,有效避免了EPB自动释放功能的误触发。
松开离合起步时的操作,考虑缓慢踩油门同时松离合、踩油门后缓慢松开离合、快速踩油门同时松离合几种常见情况,这些工况下的实车测试数据和计算结果分别如图3—图5所示。
测试场景包括:缓慢踩油门同时松离合起步(图3)、踩油门后缓慢松开离合起步(图4)、快速踩油门同时松离合起步(图5)。可以看出,在松开离合到结合点正常踩油释放时,计算的离合信号可以反映出实际的驾驶员操作情况,EPB 可以识别出当前驾驶员离合踏板已经结合,从而正常执行自动释放功能。实际车辆起步过程中,为了保证起步过程的平顺性,需要控制离合识别的最大时间。从实测数据来看,各种情况下离合识别的时间可以控制在0.3 s内,可以满足EPB起步自动释放的性能要求。

图3 缓慢踩油门同时松离合起步时的曲线

图4 踩油门后缓慢松开离合起步时的曲线

图5 快速踩油门同时松离合起步时的曲线
3 结论
采用发动机输出参数对离合踏板状态进行识别,可以在不依赖实际的离合踏板物理信号前提下,通过对发动机扭矩输出的流向分析,获得用于驱动车辆行驶的部分,进而识别出驾驶员是否松开离合踏板。该实现方法已在多个车型中实施,识别时间及其准确性可以满足EPB产品的设计需求,在离合未松开时不存在误释放现象,在正常起步时可以及时识别并触发自动释放。
来源:EDC电驱未来
作者:刘长运