摘 要
采用多车双向耦合方法,研究了侧风作用下两车超车的气动性能和动力响应。通过实时交换计算流体动力学得到的气动力和多体动力学得到的车辆动力响应来实现耦合。在耦合计算的基础上,揭示了超车和超车的气动力、弯矩、偏航角和横向位移的变化规律。分析了空气动力学与动力学之间的耦合效应以及超车与被超车之间的相互作用。验证了双向耦合的必要性。结果表明,在超车过程中,车身的姿态和两车的横向空间对车辆的稳定性至关重要,需要考虑气动力和动力响应之间的相互作用。
01 前 言
当一辆车在高速侧风超车时,由于两辆车周围流场的变化而产生瞬态气动力。附加的空气动力作用在车辆上可能会引起突然的横向位移和偏航速度,从而对车辆的操纵稳定性甚至安全性产生不利影响。同时,动力响应的恶化将进一步影响车辆的气动性能。自动驾驶和主动安全技术受到越来越多的关注,但横向位移和偏航速度的突然变化将使路径修正复杂化,甚至导致失去控制。因此,揭示车辆在侧风作用下超车时的气动特性和动力响应具有重要意义。关于超车时车辆气动性能的早期研究是通过风洞试验进行的。例如,通过1/10比例模型揭示了两车之间的纵向和横向空间对超车机动时空气动力学特性的影响。车-车超车风洞试验表明,货车前方压力场对超车受力影响较大,且影响主要依赖于货车速度。侧力和偏航力矩的动态变化也是重要的关注点。进一步的风洞试验也揭示了两辆超车之间的速度比对其气动性能的影响。然而,在传统的风洞中,试验是稳定的,从而掩盖了瞬态特性。此外,在车辆研制初期,风洞试验成本高,难以评估车辆在复杂环境下的气动性能。随着计算流体力学(CFD)和高性能计算机的发展,数值模拟已被用于揭示超车过程中车辆的气动特性。传统上采用准静态计算方法来分析超车机动过程中两车在不同相对位置的气动性能。这些研究表明,当超车从被超车的后面移动到前面时,力和偏航力矩发生了显著变化。同时,提出了一种使用不连续界面网格和移动边界的计算方法来分析瞬态气动现象。结果表明,超车时所经历的偏航力矩几乎是准静态计算结果的两倍,两车相对速度或加速度的增加和横向空间的减小会增大作用在汽车上的气动力。在超车过程中,车辆的路径都是预先确定的,偏航速度、横向位移和车身姿态的变化等动态响应在上述研究中被忽略。然而,车辆所受气动力的幅度和方向会随着横摆速度、横向位移甚至车身姿态的变化而不断变化,从而不可避免地进一步影响车辆在超车机动中的运动。同时,气动性能又会受到动力响应的影响。因此,考虑超车过程中动力响应与空气动力学之间的相互作用是很有必要的。此外,传统的超车数值模拟中,假设超车是静止的,并给超车增加一个相对速度,没有考虑超车的动态响应和气动力的变化。然而,超车机动会严重影响被超车车辆的气动特性和运动,尤其是轿车-轿车超车。反之,超车的气动力和动力响应的变化会进一步影响超车。因此,在超车机动中同时保持两车的动态运动是准确捕捉两车的气动特性和动态响应变化的必要条件。动力学模型和气动模型采用双向耦合方法计算实时动态响应和气动力。目前,该方法已被用于分析车辆在侧风中的气动性能和动态响应。结果表明,双向耦合方式下的气动力对车辆运动的影响大于单向耦合方式下的气动力。超车过程中空气动力学与动力学之间的耦合效应将影响两车的气动特性和动力响应。为此,本研究建立了一种多车双向耦合方法来研究侧风作用下车辆超车时的气动特性和动力响应。采用绝对速度而非相对速度来模拟超车,以获得超车的气动性能和动力响应,提高数值模拟的适用性。通过对非耦合方法的分析结果进行比较,说明了超车过程中气动响应与动力响应耦合分析的必要性。最后,分析了在侧风作用下超车和超车的气动特性和动力响应。
02 方法
本研究采用的双向耦合方法示意图如图1所示。计算平台由CFD商用求解器Ansys Fluent与MBD商用求解器MSC ADAMS耦合构建。同时,编写了接口程序,实现了两个求解器之间的实时数据交换。将CFD模型计算得到的气动力发送给MBD模型,MBD计算得到的动力响应反馈给CFD模型。此外,由于风压中心的位置在时间和空间上都不是恒定的,因此必须定义一个计算气动力的参考点。作用于压力中心的气动力可以等效于作用于参考点的力和力矩。在目前的研究中,参考点定位在四个轮毂的中心。MBD模型中的气动力也被应用到参考点上。

图1 CFD与MBD的耦合系统
动力响应的控制方程
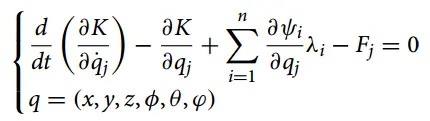
用于计算动力响应的多体动力学模型基于拉格朗日运动方程。对于每个刚体,有6个带乘子的拉格朗日方程和相应的约束方程。动力学方程为:
运动学方程为:

式中,K为动能,qj为广义坐标,ψi为系统的约束方程,λi为m×1的拉格朗日乘子数组,Fj为广义坐标方向上的广义力。对于整车模型,Fj包括轮胎与地面的接触力和由CFD控制方程得到的气动力。
几何
介绍了一种实际轿车的简化全尺寸模型。被超车轿车(车1)与超车轿车(车2)相同,轿车模型的外形及主要几何参数如图2所示。汽车正面投影面积为2.334 平方米。在速度为20m/s时,轿车的雷诺数为6.846×106。为了提高计算效率,忽略了一些附件,如侧视镜、雨刷和门把手。
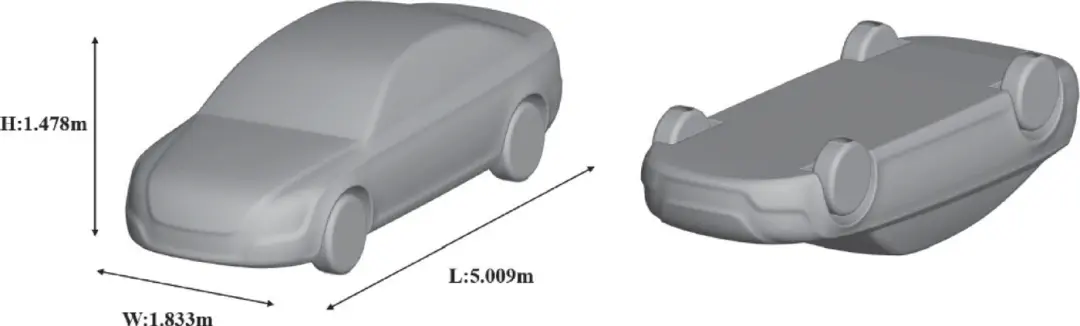
图2 简化的汽车模型
空气动力学的计算设置
气动力计算的计算域如图3所示。车1和车2分别以20米/秒和30米/秒的速度向前移动。侧风垂直于进口壁面,速度恒定为10m/s。如图4所示,为了方便描述轿车在纵向上的相对位置,我们引入了一个比例因子X/L,其中X为前后轿车之间的距离,L为轿车的长度。初始相对位置,X/L设置为−6,两辆轿车之间的横向间距设置为1m。考虑到良好的适应性,将四面体网格应用于整个计算域(图5)。创建一个包裹汽车的移动盒子,以避免因汽车周围网格畸变而导致计算发散,并且移动盒子的运动与汽车同步。通过对不同网格方案下气动阻力的比较,验证了网格无关性。通过调整移动箱体和车身表面的网格大小,形成五种不同的网格方案。超车与被超车沿直线行驶,互不耦合。以超车X/L =−3时的气动力为判据,如表1所示。结果表明,当单元数大于1100万个时,气动阻力的变化很小。考虑到计算资源,选择方案3。调整a柱、挡泥板和车轮周围的网格后,车辆表面分辨率在2 ~ 10 mm之间。为了使仿真结果更加准确,在空间分辨率上将网格拓扑划分为多个区域。最精细的区域是边界层,在轿车表面附近产生了6个棱镜层来捕捉边界层,得到30左右的壁y+。第一层厚度为1 × 10~5 m,生长速率为1.2。第二个区域是移动框,它捕获了轿车周围流动结构的细节。第三个区域在移动框外,模拟整个计算域中的流。采用SIMPLE算法对RANS方程进行迭代求解。使用混合二阶逆风/有界中心差分方案进行空间离散,使用二阶方案进行时间离散。
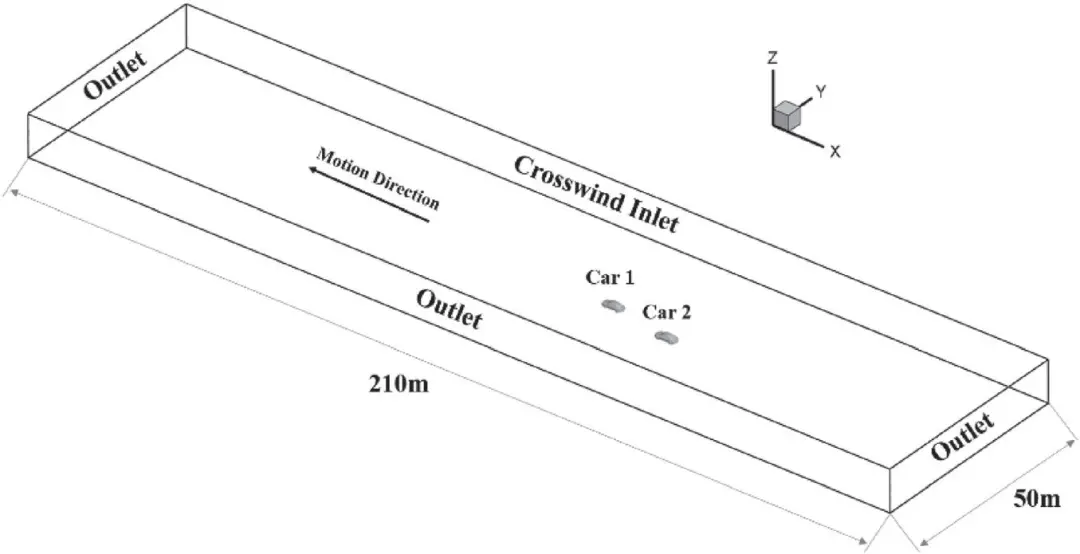
图3 计算域
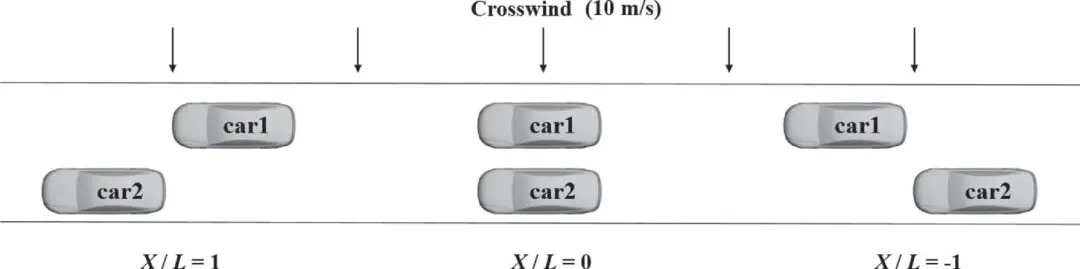
图4 超车动作X / L
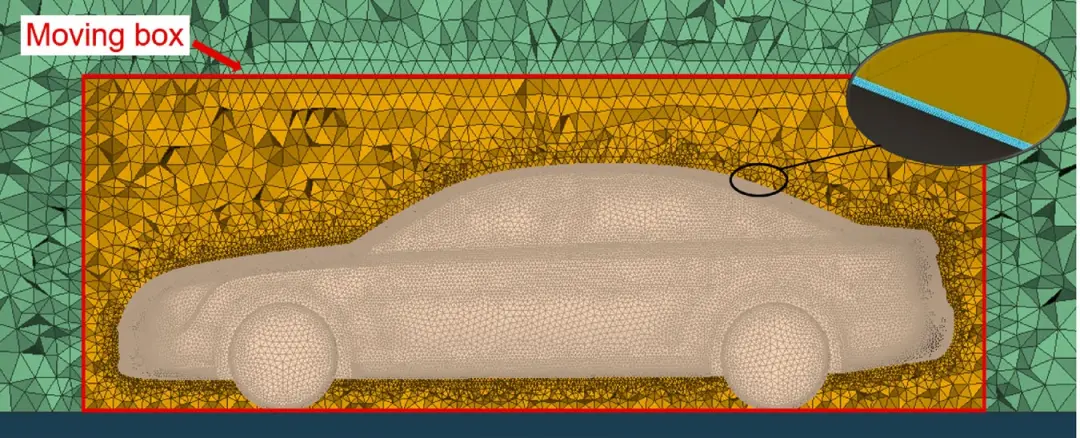
图5 部分计算网格
表1 不同网格策略下1号车的气动力
网格将随着汽车模型的运动而不断更新,时间步长将决定网格更新的规模。因此,必须选择合适的时间步长来保证更新网格的质量。在类似的研究中,模拟的时间步长通常在0.0002-0.005s之间。网格在每个时间步长都是更新的,较小的时间步长会大大增加计算时间,并且网格在较长的时间步长会产生较大的位移,这会增加重网格划分的难度,甚至导致重网格划分失败。考虑到重新网格划分的难度和计算时间,最终将时间步长设置为0.001s。
多体动力学计算装置
为了获得动力响应,根据结构和性能参数建立了多体动力学模型。如图6所示,动力学模型分为刚体、前后悬架、动力、转向、轮胎等10个子系统。前悬架是麦克弗森悬架,而后是多链接悬架。为了获得准确的轮胎受力和力矩,引入了神奇公式轮胎模型。最后,构建了具有68个运动部件、62个约束、160个自由度的动力学模型。本研究采用2d_flat road,摩擦系数为0.7。轿车的详细参数列于表2。
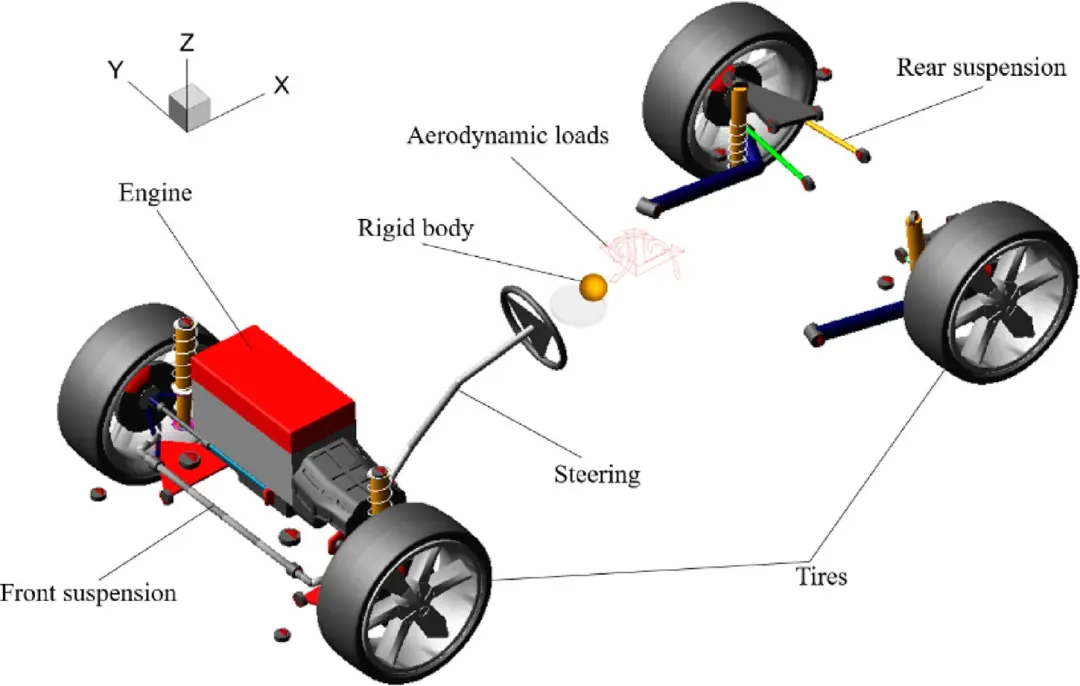
图6 MBD模型
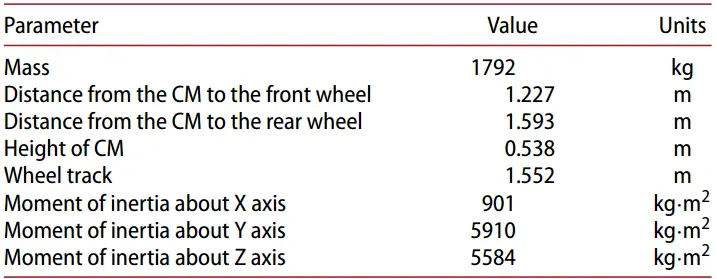
表2 MBD模型的主要参数
03 模型验证
数值模型的验证
在湖南大学HD-2风洞进行1:3比例模型风洞试验,验证气动计算中的湍流模型和离散化方案选择(图7)。风洞中气流速度为30m/s。测量了不同偏航角下的气动阻力和侧向力。偏航角范围为-15°- 15°,每3°采集一次数据。同时,进行了相应的数值模拟。与风洞试验结果对比如图8所示,数值计算得到的气动阻力系数和气动侧向力系数与实验结果吻合较好。

图7 风洞试验的比例模型

图8 试验结果与计算结果的比较:(a)阻力系数,(b)侧向力系数
多体动力学模型的鲁棒性
在侧风超车过程中,汽车的运动不断变化。因此,动态模型应该是鲁棒的。动态模型的输入参数由于实时的气动力而具有不确定性。因此,为了证明动力学模型的鲁棒性,我们进行了参数研究,在物体的参考点施加不同大小和方向的阶跃力。然后,得到轿车恒速固定方向盘行驶时的动态响应(图9)。最后,将MBD模型的输出与理论期望进行比较,验证了模型的鲁棒性。图9(a)显示了在参考点施加不同侧力(Fy)时偏航角的变化。随着力的增大,偏航角不仅相应增大,而且由于侧向附着力不足,偏航角不断增大。此外,从图9(b)中绘制的车身侧倾角可以看出,侧倾角随着侧力的增大而增大。当力的方向改变时,偏航角和滚转角的方向也会随之改变。从理论上讲,由于参考点位于汽车的纵向对称平面,因此纵向力(Fx)和垂直力(Fz)会影响汽车的俯仰角。由于参考点位于俯仰中心的西北方向(图9(c)和(d)),因此在参考点施加的正Fx或Fz会产生正俯仰角。随着力的增大,俯仰角也有与理论期望相同的变化。由于前后悬架刚度的不同,当作用力方向发生变化时,正负俯仰角的大小和变化趋势不同。因此,参数研究结果表明,所提出的动态模型具有良好的鲁棒性,能够准确地捕捉动态响应。
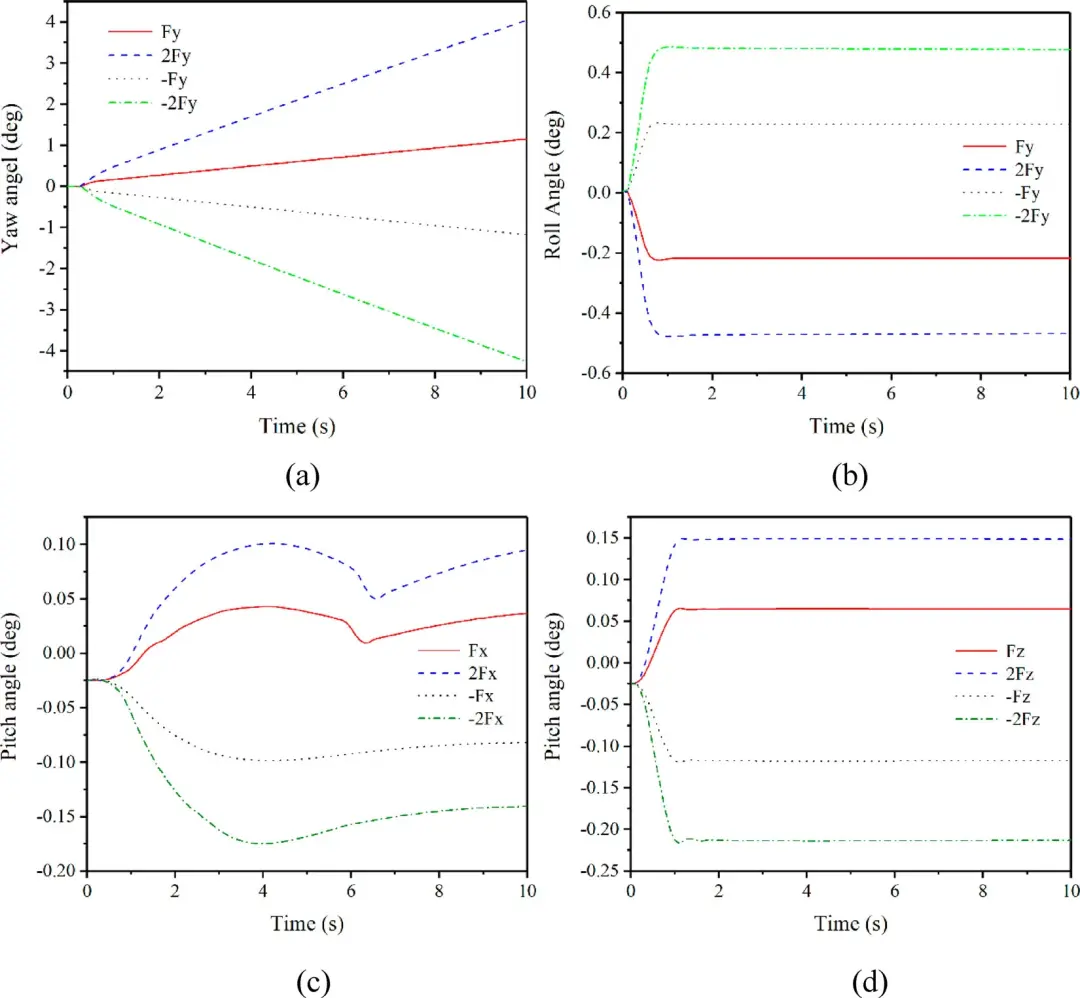
图9 MBD模型在不同输入下的响应:(a)偏航角,(b)横摇角,(c) - (d)俯仰角
04 结果与分析
空气动力性能
从图10所示的超车机动过程中气动力变化可以看出,在超车机动过程中,车1的气动阻力从X/L=-1开始增大,在X/L=0附近达到峰值。气动阻力的变化可以用图11所示的车身表面压力系数分布来解释。当车2平行于车1时,车1前面的压力最大,车1后面的压力最小。车身前后压差的变化可以解释气动阻力的变化。侧向力在X/L=−0.6左右达到最小值。随着车2的接近,车1背风侧的压力逐渐增大,从而导致侧力减小。此外,发生最小横向力的位置与汽车的速度和侧风有关。偏航力矩的大小与参考点的位置有关,但其变化与侧向力一致。
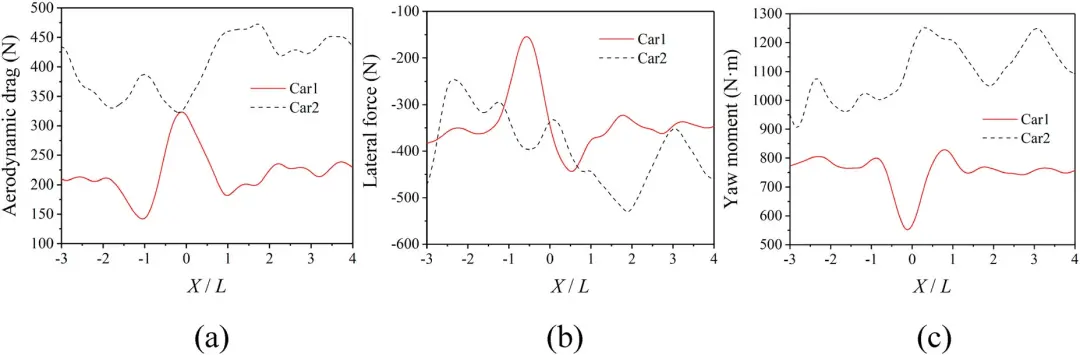
图10 超车时的气动力:(a)气动阻力,(b)侧向力,(c)偏航力矩
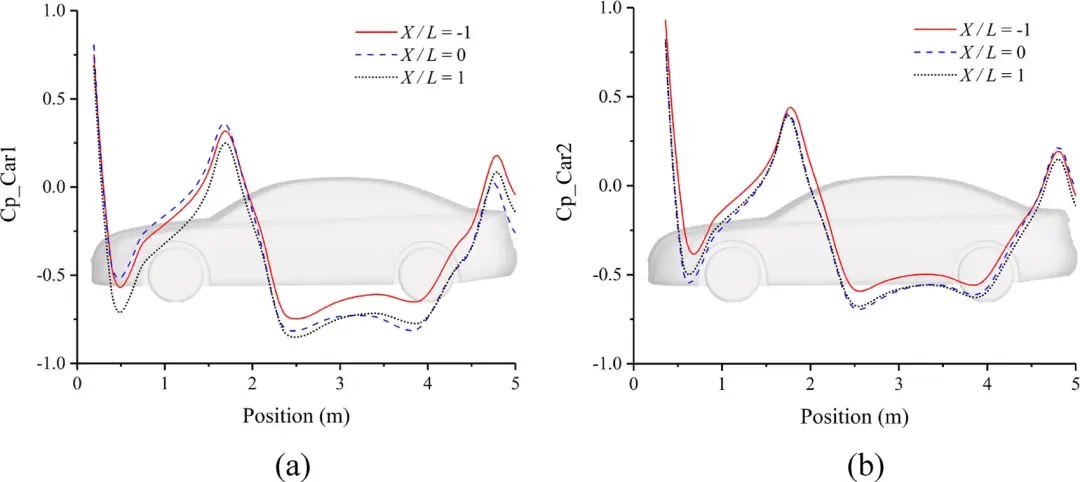
图11 沿纵向对称面的压力系数:(a)车1,(b)车2
超车时不同位置的流场如图12所示。与车1相反,车2始终处于由车1诱导的不稳定流场中。因此,车2的气动力和矩的变化是比较复杂的。综上所述,由于车2的速度更快,车2的气动阻力要比车1大得多。随着小车前后压差的减小,小车2的阻力在X/L = 0附近达到最小。当车2超过车1时,由于车1流场的影响减小,车1的气动阻力明显增大。结果还表明,车2的偏航力矩普遍增大,这可以通过偏航角增大引起压力中心的移动来解释。
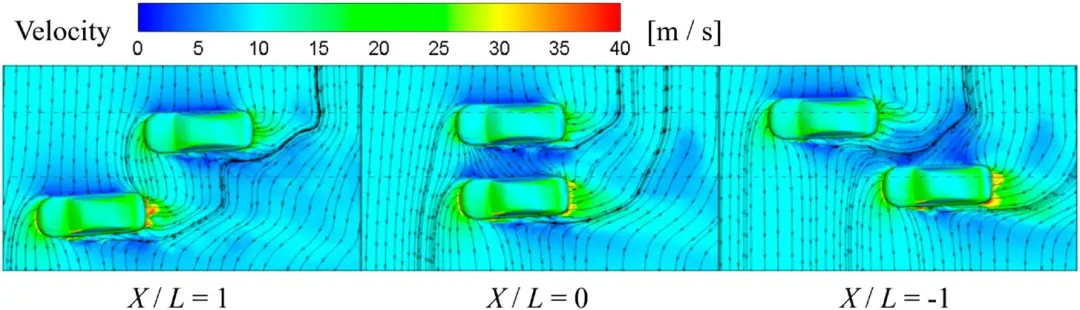
图12 速度分布云图
动态响应
从图12中绘制的不同时刻的速度分布云图可以看出,超车过程中,由于侧风和两车间流场的相互作用,会产生横向位移和偏航运动。随着超车动作的进行,车身的姿态发生了很大的变化。两车横向空间的增大减弱了两车周围流场之间的相互作用,从而导致气动力的变化较小车辆的侧向位移和偏航角等位移如图13所示。一般来说,偏航运动改变了汽车的姿态和压力中心,从而影响了汽车的气动性能。横向位移影响两车之间的横向空间和车周围的流场。当2号车逐渐接近1号车时,由于2号车前端的高压面积,使1号车后截面的侧向力减小。因此,1号车前后两段之间的横向力差进一步增大。因此,在侧风作用下,1号车的偏航和横向速度相对于单个车相应地增大。否则,当汽车1被汽车2超越时,由于汽车2后部的外部流场,汽车1前部的侧向力减小,从而减小了前后截面的侧向力差。
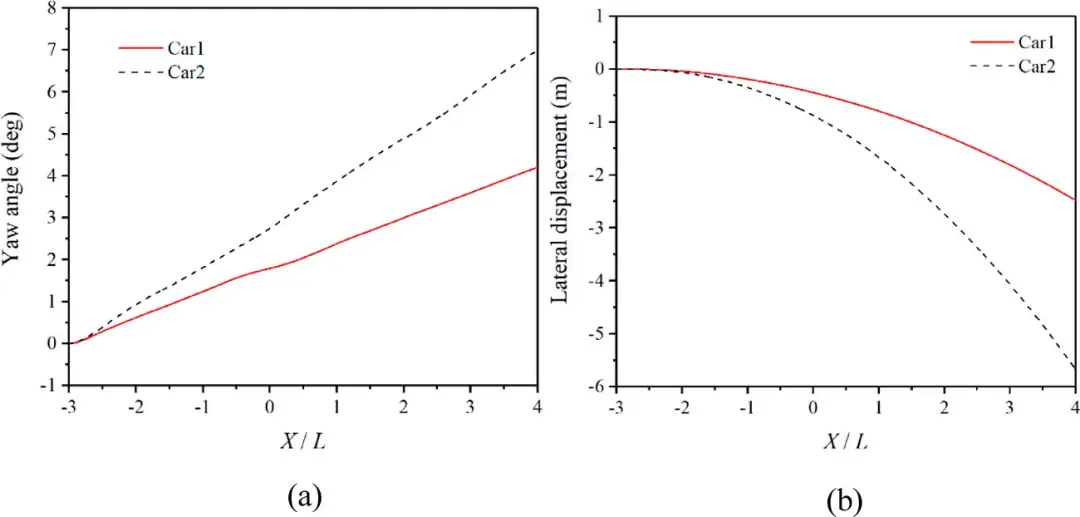
图13 车1和车2的动力响应:(a)偏航角,(b)侧向位移
结果表明,由于速度较快,2号车的动态响应比1号车更强烈。因此,在研究高速车辆的气动性能时,考虑动力响应的影响是必要的。
验证超车时双向耦合的必要性
将耦合法得到的气动力与非耦合法得到的结果进行对比,评价双向耦合对仿真结果的影响(图14)。值得注意的是,两种方法得到的气动力有很大的不同。在耦合仿真情况下,车1的气动阻力、侧向力和偏航力矩的波动比不耦合仿真时要小。这种差异可以用动力响应反馈引起的气动性能变化来解释。作用在车2上的气动力在振幅和相位上也与非耦合模拟有很大的不同。结果表明,空气动力学与车辆动力响应的相互作用对保证侧风作用下超车气动性能预测的可靠性具有一定的意义。
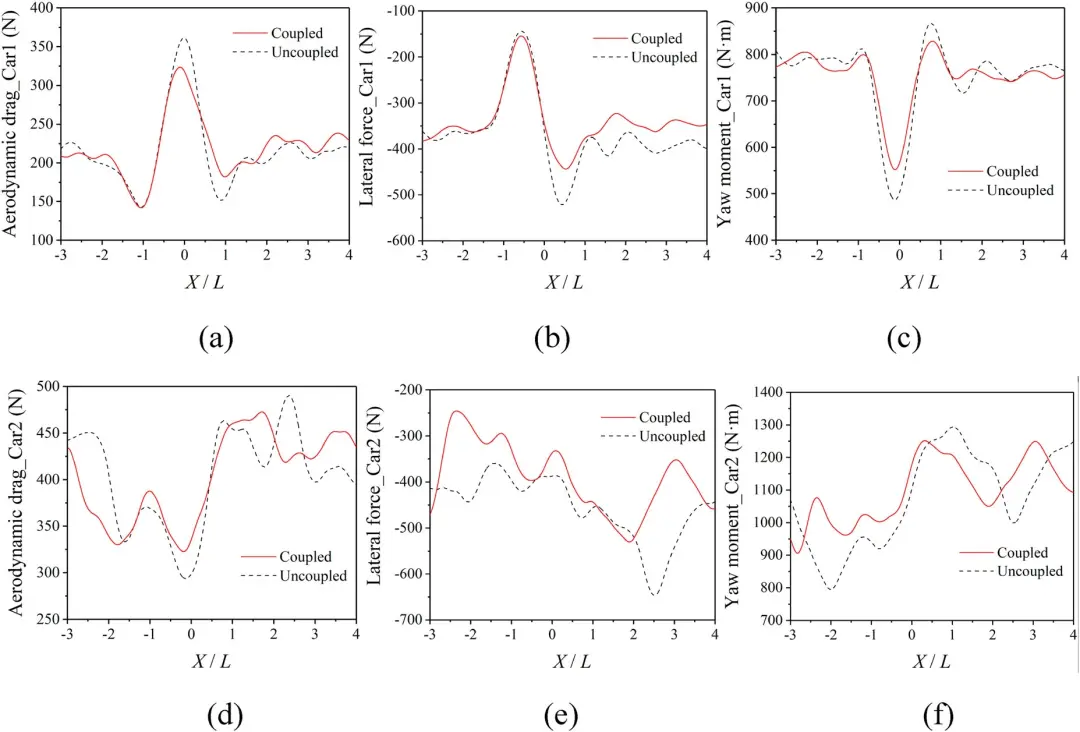
图14 不同方法下的气动力:(a)-(c)气动阻力,侧力向,车1的偏航力矩;(d)-(f)气动阻力,侧向力,2号车偏航力矩。
为了进一步确认双向耦合的必要性,我们提取了几个不同时刻的速度分布云图(图15)。在双向耦合仿真中,两车的姿态和相对位置发生了较大的变化。考虑到两辆车横向间距的增加是由侧风引起的,两辆车之间的相互作用被削弱了。然而,在其他情况下,例如在相反侧风的情况下,超车时两车的横向间距逐渐减小,相互作用变得越来越强烈,从而导致严重的事故。
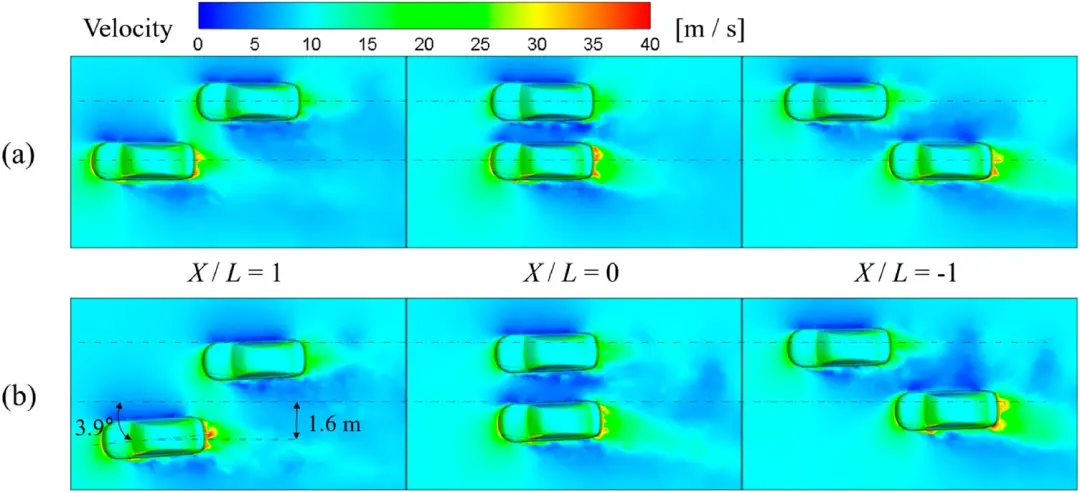
图15 速度分布云图:(a)不耦合,(b)双向耦合
05 结 论
提出了一种多车双向耦合方法,研究了侧风作用下两车超车时的气动性能和动力响应。采用动态网格技术实现车辆的运动。在每个时间步长内,实时交换CFD模型中的气动力和MBD模型中的动力响应。将计算结果与解耦法的计算结果进行比较,探讨了侧风作用下超车机动中双向耦合和绝对速度设置的必要性。结果表明:超车过程中,随着超车逐渐靠近被超车,被超车的气动阻力增大,横向力减小;然而,超车由于位于被超车的不稳定尾迹处,其气动力相对复杂。超车的偏航角和横向位移比被超车大得多。超车和被超车姿态和相对位置的变化对车辆的气动响应和动力响应有较大的影响。因此,使用多车双向耦合方法是必要的,以避免忽略这些响应时产生不现实的结果。目前的研究还表明,侧风会使两辆车之间的距离变远,从而削弱了超车策略的影响。实际上,当侧风方向或两车相对位置发生变化时,超车机动对两车的气动性能和动力响应影响很大。此外,在真实的驾驶环境中,驾驶员会对任何外界干扰做出反应。在仿真中加入驱动模型更加真实。因此,在今后的工作中应进一步揭示侧风方向和驾驶员响应的影响。
来源:AutoAero