相位图为分析非线性系统的行为提供了一种有用的方法。Voser等人使用相图来确定漂移平衡是不稳定的鞍点[13]。图 4 显示了以漂移平衡为中心的完整非线性漂移方程的相位图。相位图与使用全非线性方程和数值线性化方程计算的轨迹重叠。为了生成线性化轨迹,将动力学围绕所示的漂移平衡线性化一次,然后使用这些动力学计算整个轨迹的状态导数。图中所示的区域大约表示在路径跟踪实验中观察到的平衡周围的状态变量变化范围。
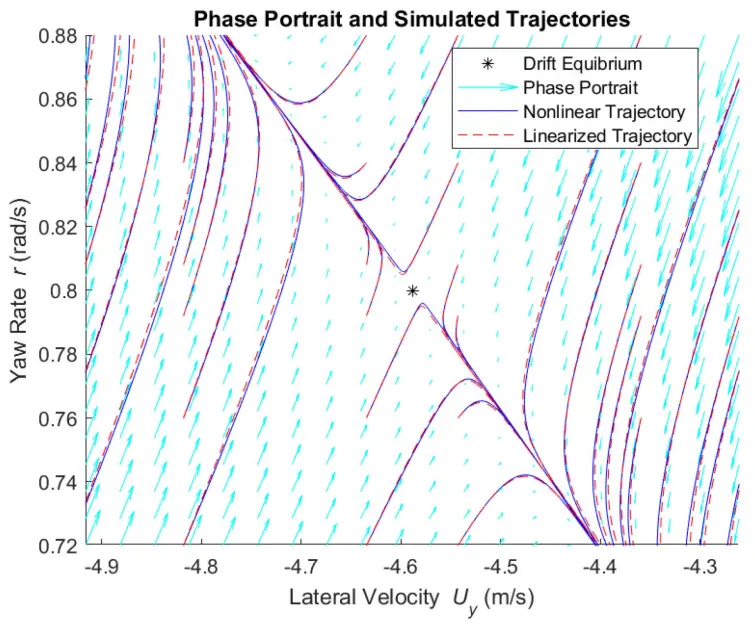
图 4.在横向速度-偏航速率相位平面中绘制的相位图和轨迹。动力学围绕星号表示的平衡进行线性化,位于,和。使用非线性模型计算的相位图以浅蓝色箭头显示。使用线性化模型(蓝线)和线性化模型(红色虚线)计算从整个相位平面开始的模拟轨迹。请注意,使用线性化动力学模拟的轨迹与使用完全非线性动力学模拟的轨迹非常匹配。
在漂移平衡附近,使用线性方程计算的轨迹与使用非线性方程计算的轨迹定性匹配。没有明显缺失的动态或行为。此外,这些轨迹在定量意义上也非常吻合。这表明线性模型在平衡周围足够大的区域上很好地表示系统动力学,以便使用线性技术进行控制。虽然这里只展示了单个平衡的线性化,但图 4 代表了大范围的漂移平衡。
为了更好地理解线性化动力学如何从平衡到平衡变化,我们计算并绘制了整个横向速度 - 偏航速率相位平面的平衡特征向量。漂移的两种状态表示有一个稳定和一个不稳定的特征向量;图 5 显示了相位平面。从质量上讲,稳定的特征向量在各种均衡中保持非常一致的方向。不稳定特征向量的方向随着漂移平衡的变化而逐渐改变。特征值大小也会随着平衡值的变化而平滑而缓慢地变化。
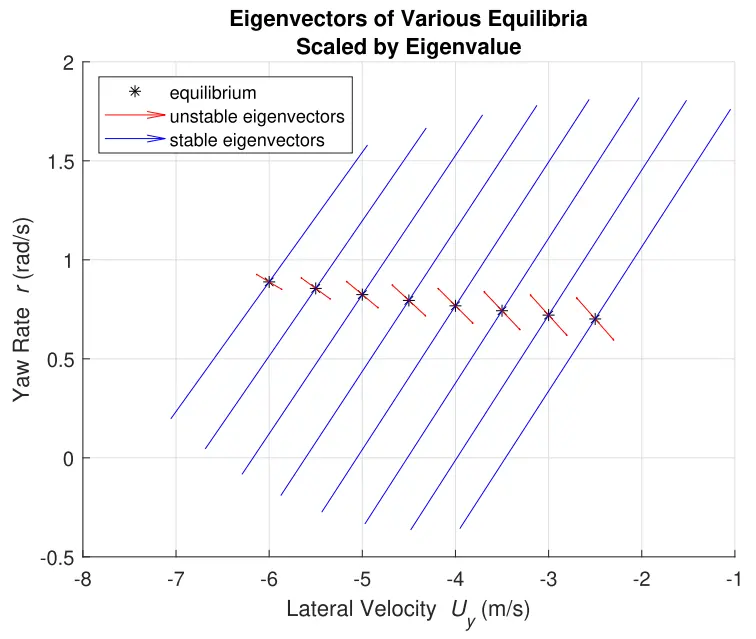
图5. 整个相平面漂移平衡的特征向量。显示的平衡是通过保持纵向速度和曲率半径恒定和变化的横向速度从 -6 到 -2.5 m/s。计算并绘制每个绘制的均衡的线性动力学的特征向量。不稳定的特征向量显示为红色,而稳定的特征向量显示为蓝色。每个特征向量的大小由其相应的特征值进行缩放。请注意,当横向速度显著变化时,特征向量和值的方向和大小会平滑变化。
特征结构的一致性为漂移平衡提供了一些额外的见解。虽然漂移是不稳定的,但不稳定的特征是一致的,并且使用线性理解可以很好地预测。对于给定的线性控制器,当系统移动到相邻平衡或在单个平衡周围的区域时,开环动力学特征结构的一致性会导致闭环动力学的预期一致性。这让我们更有信心,可以使用基于线性模型的控制器控制整个区域的车辆。
Ⅳ 控制器开发
在不牺牲模型保真度的情况下,使用线性模型表示车辆动力学的能力允许将传统的线性控制技术应用于控制漂移车辆的问题。
A. 稳定和路径跟踪控制器
如(13a)所示,该系统由四种状态表示:和和两个输入:和。所有状态和输入都以偏离平衡值的程度来衡量,当系统达到预期平衡时,状态和输入都将等于零(平衡值已经为零)。虽然线性化状态方程可以应用多种线性控制技术,但本文重点介绍线性二次调节器 (LQR) 控制,因为它既熟悉又透明。无限视距 LQR 的增益矩阵很容易计算,和矩阵也有直观的解释。这样就可以对线性化动力学进行额外的测试--系统是否以直观的方式对这些矩阵的变化做出反应?第V-D 节通过实验回答了这个问题。
矩阵和矩阵最初是根据布赖森法则[14]选择的,并在模拟中进行了调整,最后在初步实验后进行了调整。最终的矩阵和矩阵(如下所示)为对角矩阵,分别对状态和指令进行惩罚。每个对角线条目均为(1/与平衡值的最大可接受偏差)
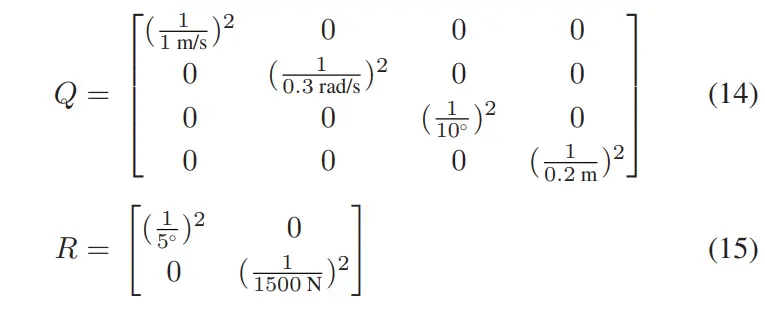
输入形式为,其中是无限视距LQR 问题的解。闭环系统的形式为:

请注意,所需的漂移平衡(使用单轨模型、Fiala 轮胎模型和车辆的估计参数计算)可能不是真实系统的实际平衡。漂移中的建模和参数错误比比皆是,因为轮胎在测试过程中会发热并脱落橡胶,从而产生与模型中假设的静态值不同的变化。如果计算出的平衡不是系统的真正平衡,则此控制器无法校正稳态误差。因此,这种方法应该预料到稳态跟踪误差。然而,特征结构的一致性表明,这种参数变化不会对系统的闭环稳定性产生重大影响。稍后介绍的实验研究了即使使用简单的控制器设计,特征结构一致性是否足以处理实际参数的变化。
来源:同济智能汽车研究所













