我们使用一个单独的控制回路,具有前制动力,来调节车辆的纵向速度。均衡用作前馈项,而附加的比例项可校正:

在仿真和实验中,增益 足以进行速度跟踪。
Ⅴ 实验验证
A. 测试平台
MARTY 是 1981 年改进的 DMC Delorean,用作实验结果的试验台。MARTY 包含一个 GPS/IMU,可提供实时状态估计、计算机控制的电动助力转向、后轮上的双电动机以及允许单个车轮制动的线控制动系统。MARTY 通过 Oxford Technical Systems RT4003 双天线集成 RTK-GPS/IMU 获取车辆状态信息。状态信息以 250 Hz 发布。dSpace MicroAutoBoxII (DS1401) 以 250 Hz 的采样率运行 MATLAB/Simulink 模块,收集状态信息,实现控制器,并向转向、节气门和制动系统发送命令。表 Ⅰ显示了 MARTY 的更多规范,并在 [5]、[6] 和 [15] 中进行了讨论。
表 I 车辆参数。

对于实验测试,平衡和准平衡轨迹前面有一个入口轨迹,以启动漂移并使飞行器达到起始平衡,使用 [5] 中讨论的轨迹生成和控制器。下面显示的数据集不包括漂移进入和退出周期,侧重于在 LQR 控制器处于活动状态时收集的数据。前部制动力在左右轮胎之间平均分配。实验产生了所需的后驱动力,通过围绕车轮速度 闭合反馈循环,如 [5] 中所述。
B. 平衡轨迹
对于第一个实验,跟踪的平衡位于,,和。遵循这种平衡会勾勒出一条圆形轨迹。跟踪平衡的线性动力学如下所示:
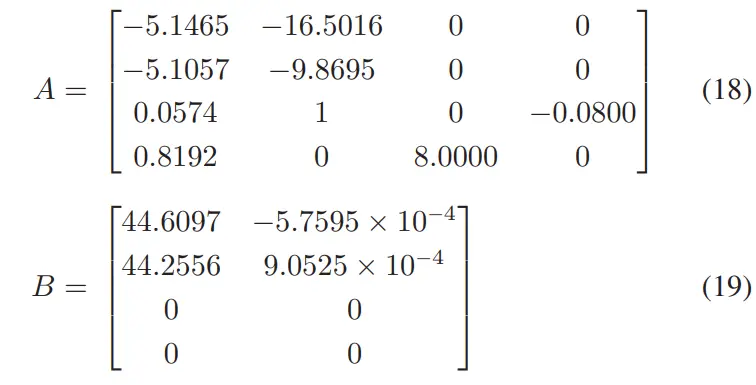
图 6 显示了使用稳定 LQR 控制器的四种车辆状态。图中所示的所有四种状态相对于现有技术而言,对于此应用程序来说,误差都非常低。特别是横向路径跟踪误差,相当低,RMS 误差为 4.2 cm,标准差仅为 1.4 cm。数据显示出明显的周期性,例如图 6 中 41、49 和 57 秒之前的横向速度出现峰值。该数据集表示圆形轨迹的大约 2.5 圈。这种周期性与轨道表面的变化相关。控制器可以精确地保持轨迹,以便在赛道表面的相同变化上行驶时,每圈都会表现出相同的可见动态响应。
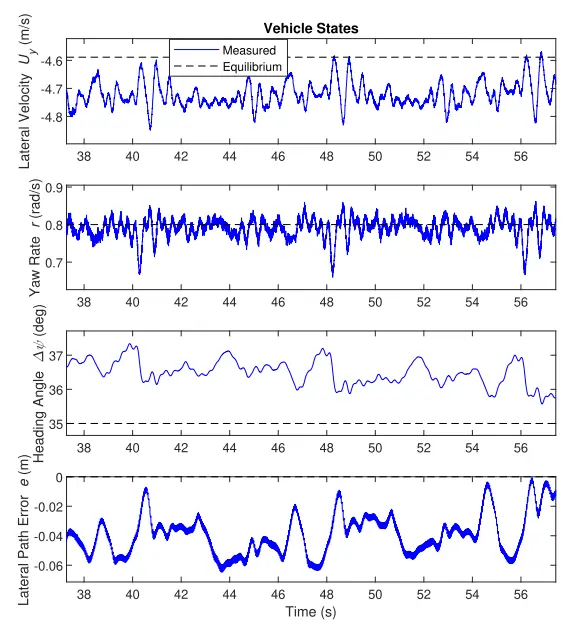
图 6. 状态跟踪性能,用于跟踪单个平衡。测量值以蓝色显示,平衡值以黑色虚线显示。
图 7 显示了相平面中的横向速度和偏航角速率状态数据。在此实验期间,车辆保持在所需的平衡附近。即使平衡没有完美建模(测量状态的质心不在所需平衡之上),系统仍然保持稳定,跟踪误差仍然很小。这些实验支持了这样一个假设,即特征结构一致性在现实世界的不确定性下实现了闭环稳定性。正如预期的那样,不确定性会产生稳态跟踪误差,这些误差的大小取决于特定的增益选择。比较图 4 和图 7 的轴的范围,我们看到图 7 所示的大部分轨迹都在图 4 所示的相空间内。图 4 中的模拟轨迹表明,关于平衡线性化的动力学模型充分预测了该区域的行为。图 7 所示的实验数据证实,这个单一的线性化模型足够精确,可以开发一个控制器,使车辆保持接近这种平衡。
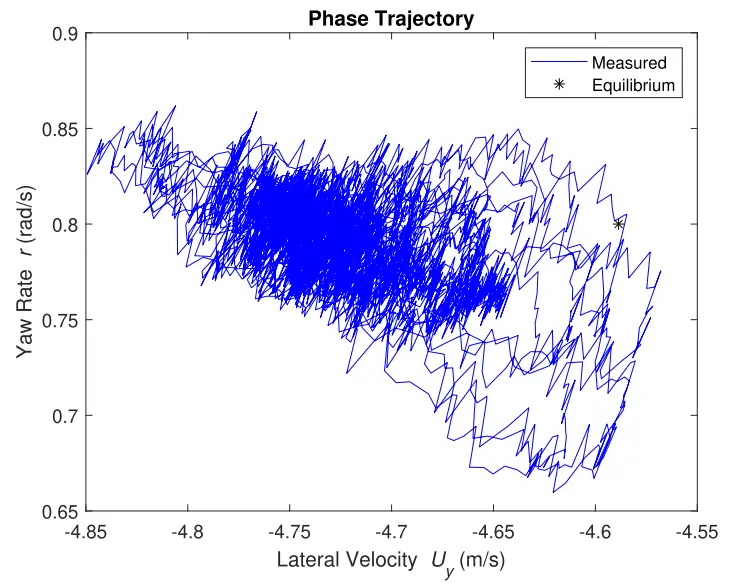
图 7.来自图 6 所示的相同常平衡实验的数据显示在横向速度-偏航速率相位平面上。该实验的参考平衡用星号表示,而测得的横向速度和偏航率值用蓝线表示。请注意,在整个数据集中,状态始终接近平衡。
LQR 控制器命令的两个稳定输入如图 8 所示。我们没有可用的轮胎力的直接测量值,因此这些力是根据惯性传感器估计的(见附录)。输入命令的变化很小:指令转向角的标准偏差仅为 0.4 度,指令后驱动力的标准偏差为 213 N。这种变化很容易通过执行器实现,测量和命令输入信号之间的相似性证明了这一点。
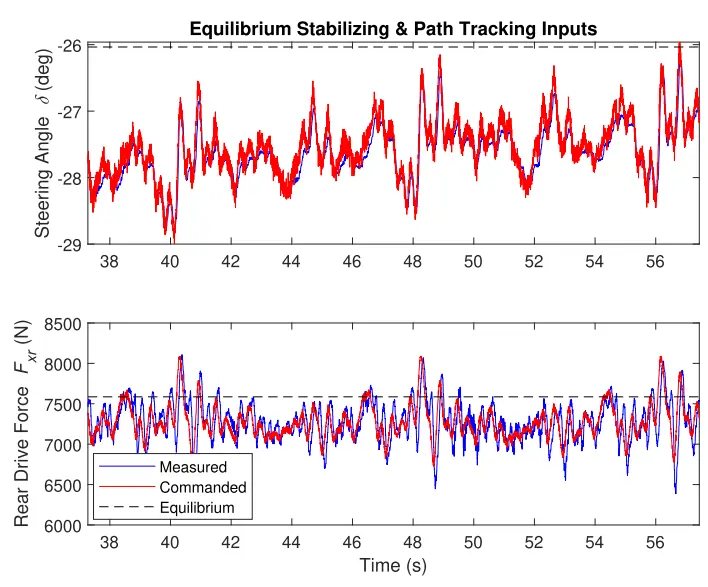
图 8.由 LQR 控制器命令的稳定输入。测量的输入显示为蓝色,而命令的输入显示为红色。每个输入的平衡值由黑色虚线表示。
最后,用于控制纵向速度的纵向速度和前制动力如图 9 所示。即使使用恒定的平衡前馈加比例反馈的简单控制定律,纵向速度的误差也相当低。通过前馈纯平衡值,而不是根据当前命令和状态计算前馈,我们避免了在前制动力命令中引入额外的噪声。
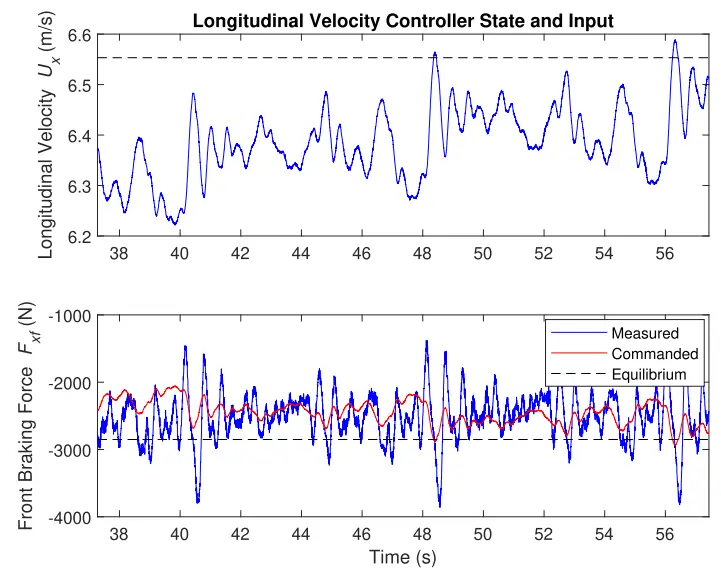
图 9.纵向速度控制器状态和输入,同时跟踪单个平衡。测量值以蓝色显示,命令输入以红色显示,黑色虚线显示平衡值。
来源:同济智能汽车研究所













