编者按 如何实现对智能网联汽车(VUT/SUT)与两轮车之间的双向交互过程的仿真,尤其是在城市道路中交叉口场景强交互情景(轨迹交叉)下的仿真,是我们此次想探讨的话题。从这种交通冲突的暴露率和危害率等角度看,仿真测试的必要性毋庸置疑。从相关研究现状的角度看,能够实现强交互模拟的两轮车行为模型的发展远滞后于同类的车辆行为模型(驾驶员模型)和行人运动模型。本文基于对中国城市路口自然驾驶数据的分析,和对仿真环境的适配要求分析,对传统社会力模型进行了改进设计,并基于数值模拟和仿真模拟分析了新模型(ISFM)的效果,初步探索了其在测试应用上的潜力。
内容概览
1. 引言
2. 目标:两轮车与汽车的交互行为
3. 示例:现有方法仿真测试表现
4. 示例:改进社会力模型仿真测试表现
5. 展望
编者:刘镇源 陈君毅
1、引言
2023年11月我国正式发布了《关于开展智能网联汽车准入和上路通行试点工作的通知》。然而,随着试点工作的开展,目前智能网联汽车(Intelligent Connected Vehicles,ICV)与现实世界中的动态交通参与者的交互表现,尤其是行为多变的两轮车,尚不令人满意。
两轮车在交通系统中的现状:
暴露率高:两轮车是交通系统的重要组成。仅中国,自行车和电动两轮车的保有量已超过4亿辆,且未来仍有不小的上升空间
易受到伤害:2021年全球交通事故中两轮车驾驶员死亡占比约达35%行为不确定性高:部分两轮车驾驶员在通勤和送外卖等情况时,会做出闯红灯行驶(速度不确定),从拥堵车流中穿梭(轨迹不确定)等行为
综上,高级别ICV在面临由两轮车构成的复杂真实交通环境时,如何保证安全,且平衡效率和舒适等各方面性能,成为了目前亟待解决的问题。因此,有必要在这类场景下开展对ICV的测评。然而,现有测试法规中如E-NCAP,C-ICAP等,测试过程为汽车与预定义轨迹两轮车的单向交互,显然不能够反映真实世界中两轮车实时变化的情况。所以,有必要在测试任务中复现真实世界的两轮车运动行为,即构建两轮车运动行为模型,实现被测汽车与两轮车的双向交互,以支撑更为全面和合理的测试结果。
2、两轮车与汽车的交互行为
在真实世界中,两轮车与汽车交互时时刻刻都在发生,这是两轮车行为模型构建的重要参考,也即模型复现的目标。研究人员可以通过分析真实交互过程,探寻运动行为形成的原因,进而构建更加真实的两轮车运动行为模型。下面两个动图展示了真实交通环境中,两轮车与汽车发生强交互时的两种不同决策行为:超车和避让。
超车:在遇到汽车时,两轮车速度增加或不变,有时其运动方向朝汽车头部方向偏移(以保证足够的超车空间),优先于汽车通过冲突点
避让:在遇到汽车时,两轮车速度减小或不变,有时其运动方向朝汽车尾部方向偏移(以保证一定的通行效率),落后于汽车通过冲突点
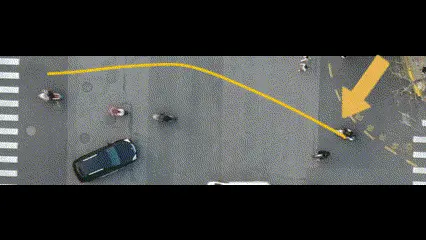
图2 超车:两轮车从车头前方超车
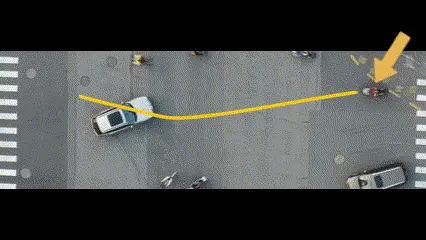
图3 避让:两轮车从汽车尾部避让
以上是两轮车与汽车在真实世界发生强交互时的两种不同决策行为,在仿真环境中对两轮车运动行为建模时,需要注意模型能否对真实行为进行良好的复现。
3、现有方法仿真测试表现
目前测试场景中两轮车的运动行为主要通过以下两种方法实现,轨迹预定义和规则模型驱动。本小节选择Apollo汽车[1]作为被测对象,基于VTD仿真平台,对这两种方法的测试过程进行了复现,并探讨了现有方法存在的问题。场景如下所示,两轮车直行驶过路口,汽车相对两轮车横向驶过路口。两轮车初速度为10km/h,汽车初速度为15km/h,每种方法两轮车与汽车的初始位置一致。
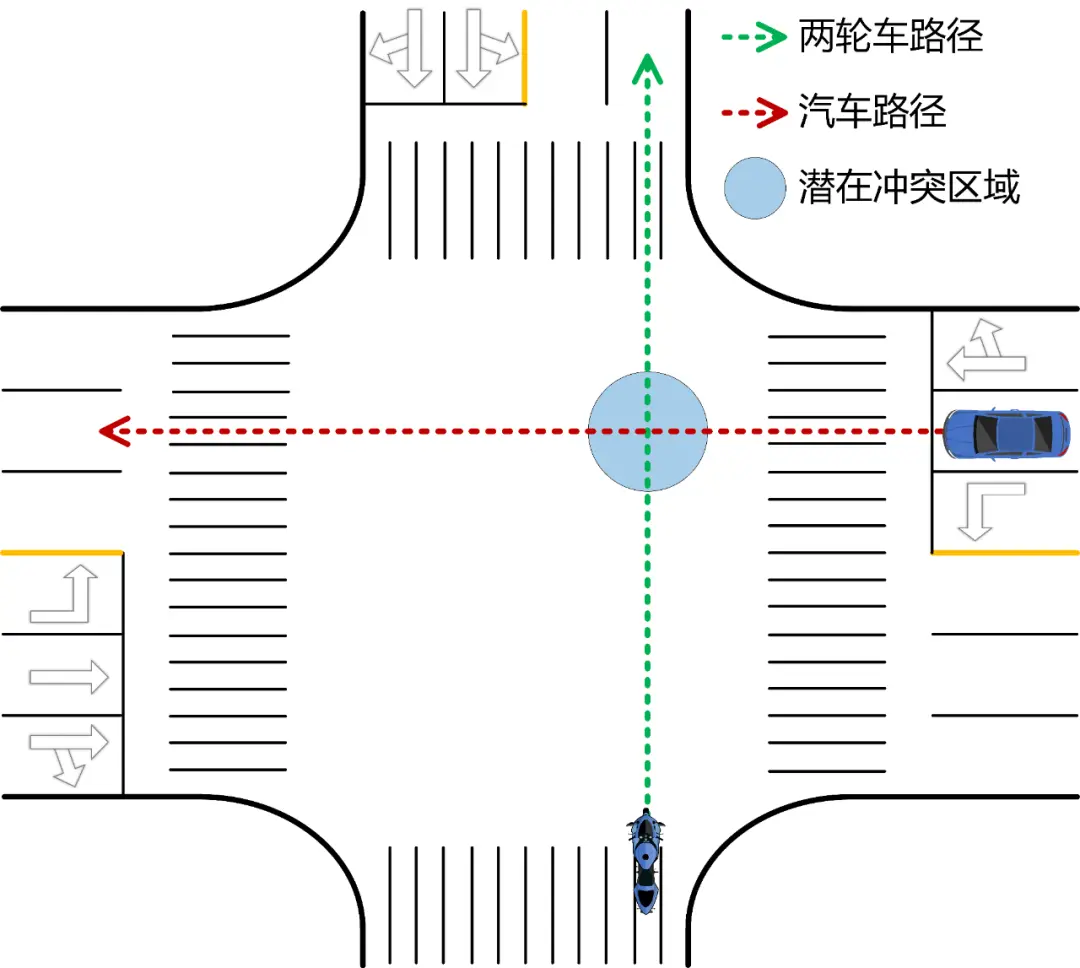
图4 强交互场景示意图
3.1 方法一:轨迹预定义
轨迹预定义的两轮车与Apollo的交互过程如下所示。这是典型的单向交互过程中,即Apollo的行为会根据两轮车的行为做出响应,但两轮车的行为不会随场景中汽车行为的改变而改变。重播 方法一:轨迹预定义的仿真测试表现从视频中可以看到,无论汽车距离两轮车多近多远,或是汽车是否有过减速动作,两轮车都只能以预定义的方式运动。这种单向交互的测试方法虽然简单直观且完全可重复,但其既不能体现出两轮车在交互时的特点(无真实性),又受限于具体场景(缺乏泛化性)。
3.2 方法二:简单规则模型
与方法一不同,简单规则模型能够与Apollo实现双向交互,即两者自身的行为会随着对方的改变而改变,具体双向交互过程如下所示。重播 方法二:简单规则模型的仿真测试表现
从视频中可以看到,规则模型待汽车完全通过后才开始行驶,过于保守。这类模型只能在满足规则设定的情况下做出相对合理的行为(如直路场景),而在更为复杂的交叉口场景,规则驱动的模型则凸显出在双向交互中真实度较低的问题。因此,这种仿真方法难以模拟复杂的双向交互过程,真实性较差。
综上,现有两种方法仅能在特定情况下进行应用,对于高级别ICV的测试需求无法满足。
4、改进社会力模型仿真测试表现
4.1 方法三:改进社会力模型(ISFM)测试表现
社会力模型(Social Force Model,SFM)最初被用于行人运动建模,其基于物理学中的粒子模型思想,是对社会系统中个体之间的相互作用和行为演化过程建模的一种方法。
在此基础上,我们结合对真实交互过程的观察和对仿真环境适配要求的分析,对传统社会力模型进行了改进设计,提出了改进社会力模型(Improved Social Force Model,ISFM),其在仿真中的双向交互过程如下面的视频所示(起始条件与第3节的设定保持一致)。
方法三:改进社会力模型的仿真测试过程
从视频中可以看到,ISFM在遇到汽车前正常行驶,遇到汽车时进行一定的减速,同时朝车尾方向偏移,能够良好复现真实世界中两轮车的避让行为,实现了测试过程中较为真实的双向交互。
具体地,三种方法的速度对比曲线如下所示,能够看到ISFM具有合理的速度波动产生。
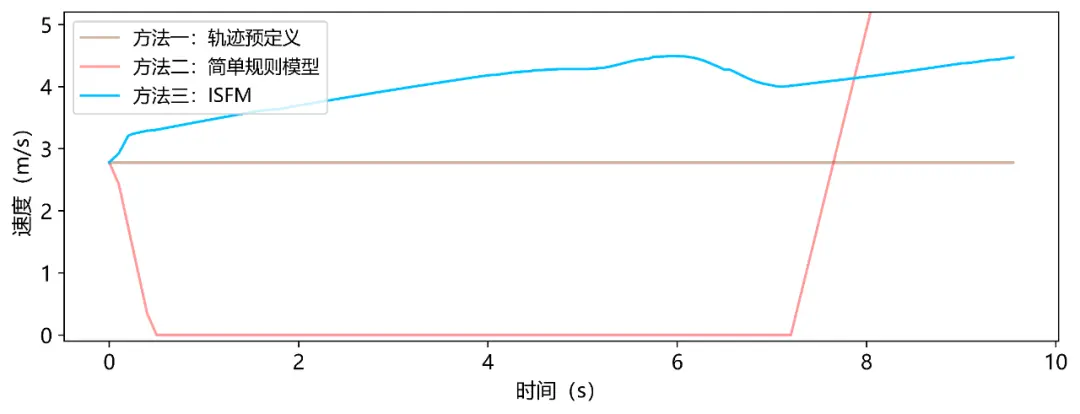
图5 轨迹预定义、规则模型与ISFM的速度曲线对比
4.2 传统社会力模型介绍、分析与验证
社会力模型采用牛顿力学的思想,将可能对个体有影响的对象抽象为一种「社会力」,如目标地点带来的「领航力」,汽车带来的「汽车力」等。
传统社会力模型的社会力类型及作用:
领航力:驱动个体前往目标地点
边界力:将个体的运动约束在一定范围内汽车力、其他两轮车力:相互排斥、避免碰撞
传统社会力模型中,两轮车直行通过路口时,其可能受到的社会力如下图所示。
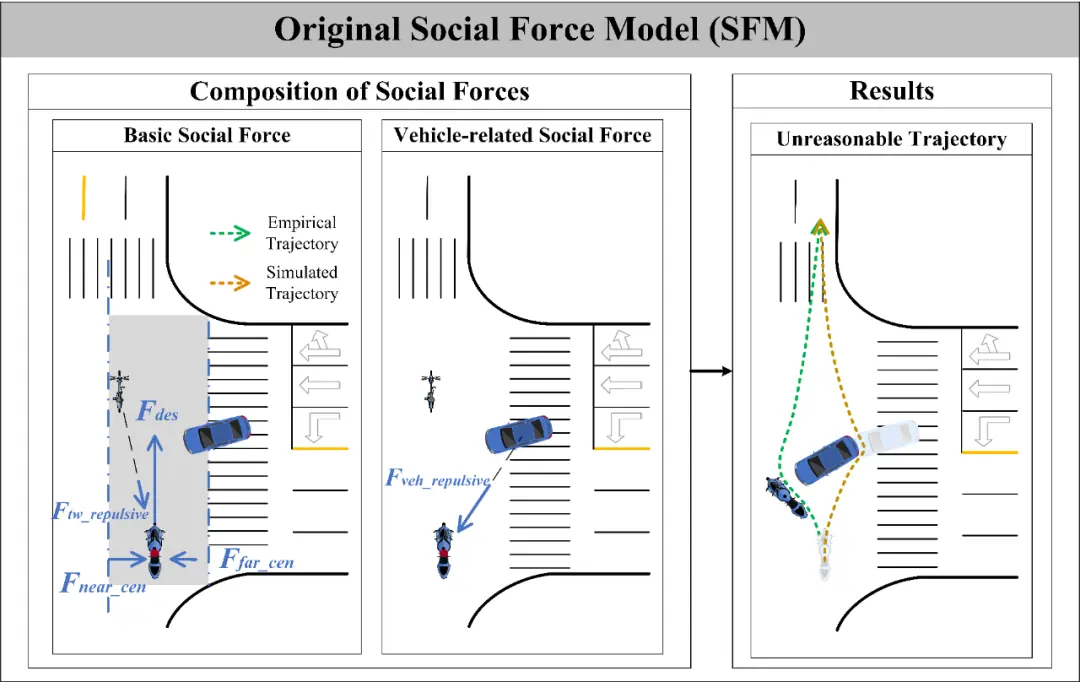
图6 传统社会力模型概念图
在传统社会力模型中,两轮车受到的汽车力为两点间斥力的形式,这会使得两轮车速度下降的同时方向朝车头方向偏离,造成与真实行为相矛盾的情况发生,下面的动图展示了传统社会力模型的交互过程。
4.3 改进社会力模型介绍、分析与验证
经过上述分析,传统社会力模型在强交互场景中表现与真实结果差异较大的原因是汽车力的设计不合理,因此,在ISFM中对「汽车力」进行了重新设计,如下图所示。
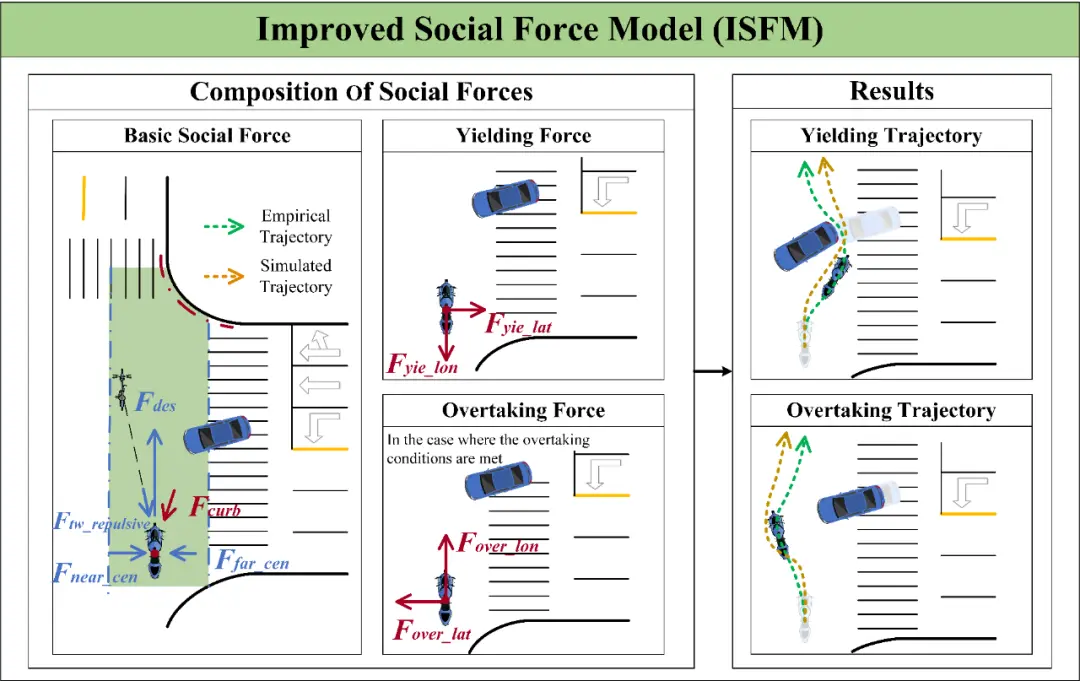
图8 改进社会力模型(ISFM)概念图
在ISFM中,汽车力由避让力和超车力两部分组成,介绍如下:
避让力:两轮车纵向减速,横向朝车尾偏移
超车力:在满足超车条件时(两轮车速度大于汽车速度),两轮车纵向加速,横向朝车头偏移
其中,为了更合理的复现真实交互行为,与横向相关的力设置了一个生效范围,当且仅当汽车出现在范围内时,该横向相关的力生效。
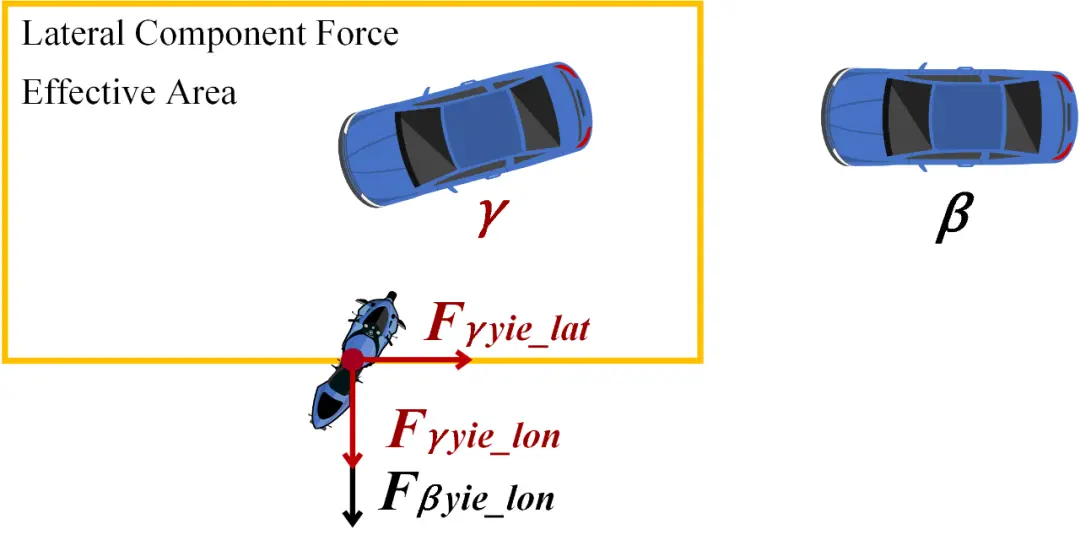
图9 避让力示意图
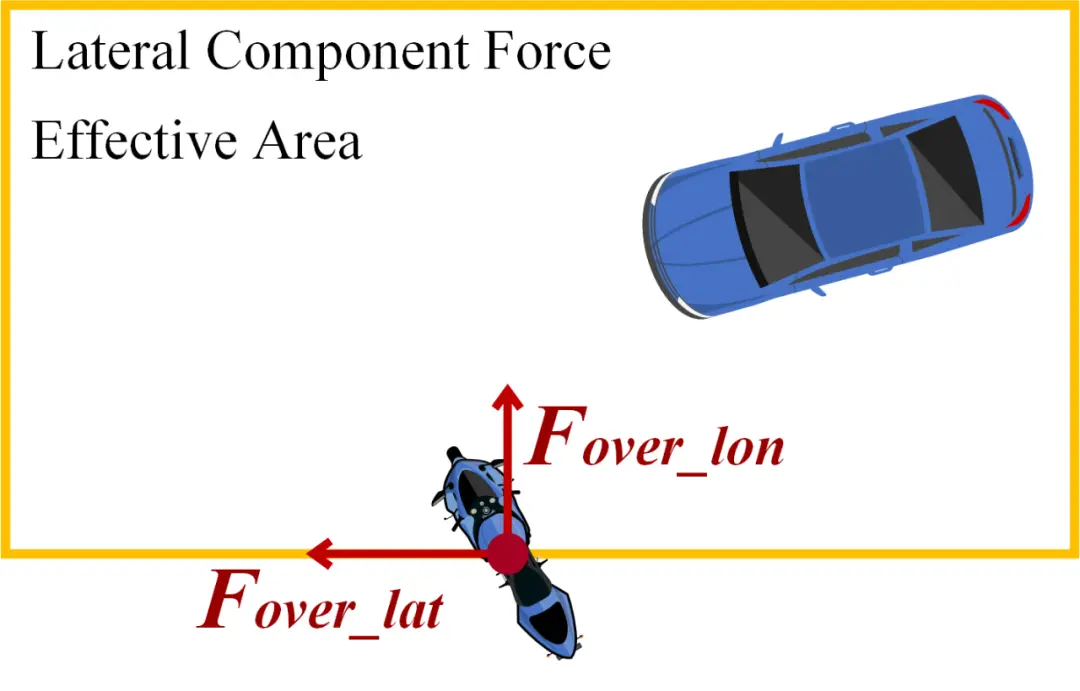
图10 超车力示意图
关于ISFM更详细的介绍,感兴趣的读者可以检索文章题目[2]进行查阅。
同4.2小节展示的真实交互案例,ISFM的交互过程如下所示,可以看到ISFM能够在一定程度上复现两轮车的真实行为。
改进社会力模型(ISFM)交互与真实交互结果对比(模拟结果与真实结果一致性高)
4.4 改进社会力模型测试过程分析
本小节将对ISFM的仿真交互过程进行进一步的分析。需要说明的是,为了使得ISFM的输出能够与仿真软件中接收的控制信号合理匹配,ISFM中与横向相关的力都以前轮转角的形式解算,与纵向相关的力仍以纵向加速度的形式解算。
场景1/避让场景:两轮车由ISFM控制,初速度为10km/h,汽车以18km/h匀速左转。重播 避让场景:改进两轮车社会力模型(ISFM)避让汽车
上述交互过程中,各时刻下汽车力和导航力的具体信息如下图所示。从图中可以明显看到,随着汽车与两轮车之间的距离不断靠近,两轮车纵向减速度逐渐增大,同时随着汽车力(转角)开始作用,两轮车也朝着汽车尾部方向偏移,有效地解释了模型运动过程。
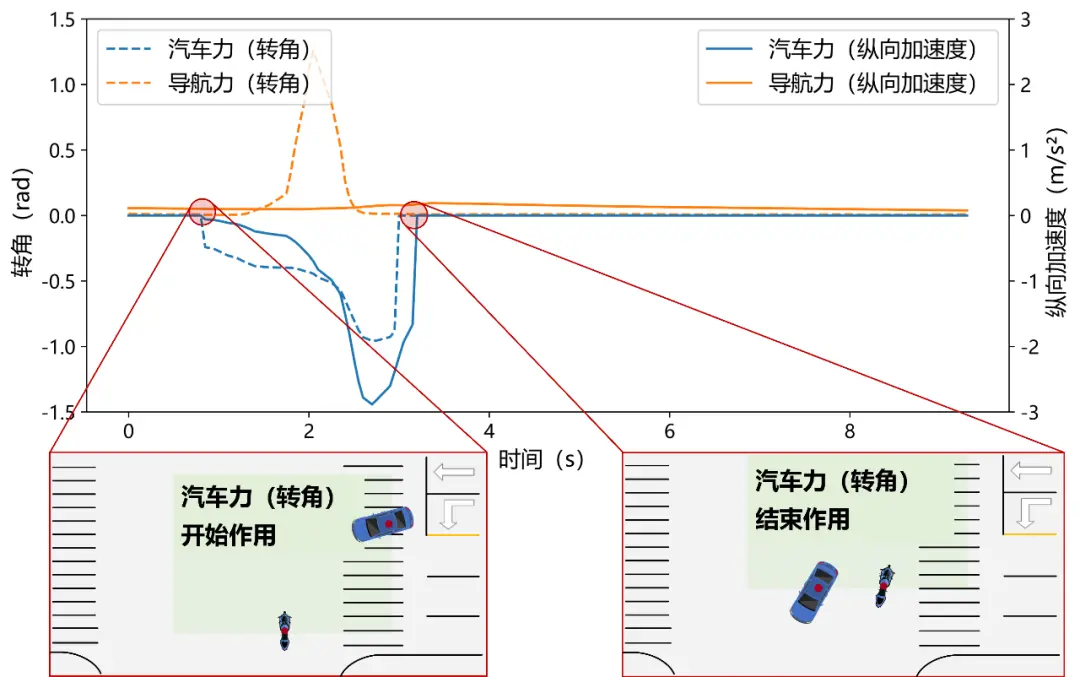
图12 避让行为:各时刻下两轮车所受到的社会力
场景2/超车场景:两轮车由ISFM控制,初速度为15km/h,汽车以10km/h匀速行驶。重播 超车场景:改进两轮车社会力模型(ISFM)超过汽车下图也同样展示了该场景下两轮车各时刻所受到的社会力信息,表明较高速度下的两轮车所受到的汽车力并没有一味地使其减速、避让,两轮车也能够实现加速、超车的动作。
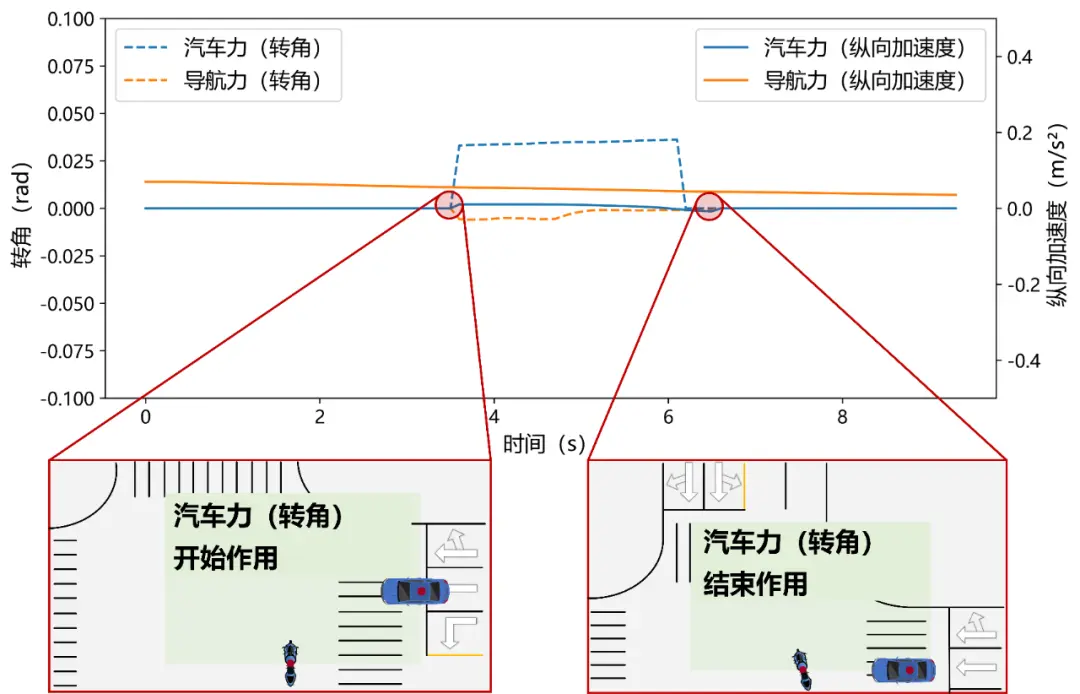
图13 超车行为:各时刻下两轮车所受到的社会力
5、总结与展望
城市道路中的两轮车行为复杂,轨迹多变,很多人类驾驶员对其的轨迹预测也时常面临挑战,未来高级别ICV的落地也必然要面临与两轮车交互的难题,而测试是解决和验证交互过程的必由之路。
本文针对强交互场景,首先探讨了现有测试方法的局限性,并在同样的场景设置下,对比分析改进社会力模型(ISFM)的仿真测试表现,体现了ISFM和Apollo在测试中的双向交互潜力。最后,展示了避让和超车的两个交互实例并更具体地呈现了ISFM在交互过程中的社会力变化情况。
在未来,有更多的两轮车交互行为及场景期待被复现,如两轮车转弯,两轮车集群通过路口,两轮车从拥堵的车流中穿梭等等。此外,研究人员可以使用潜力更大的方法(如机器学习、大语言模型)对复杂的两轮车运动行为进行建模,进而有效地支撑高级别ICV性能的测试和验证。
6、致谢
感谢HEXAGON & MSC Software提供的自动驾驶仿真软件VTD的支持
感谢sinD团队[3]提供的十字路口轨迹数据集(http://github.com/SOTIF-AVLab/SinD)
感谢计算机科学与技术学院、土木工程学院和汽车学院的三位本科生同学(王麒懿、秦蛟和王俊杰同学)在模型优化、数据处理和仿真接入等方面的研究贡献
参考文献:
[1] BAIDU: Apollo. [EB/OL]. [2024-11-19]. https://apollo.baidu.com/(2024).
[2] Liu Z, Zhong N, Chen J, et al. A modeling method for two-dimensional two-wheeler driving behavior during severe conflict interaction at intersections[J]. Accident Analysis & Prevention, 2024, 205: 107668.
[3] Xu Y, Shao W, Li J, et al. SIND: A Drone Dataset at Signalized Intersection in China[C]//2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2022: 2471-2478.
责编丨高炳钊
来源:同济智能汽车研究所













