近年来随着汽车行业的发展,车辆在各行各业得到了广泛应用。越野车因为其良好的通过性也被应用到更多的场景,越野车的主要工作环境为非铺装路面等恶劣工况。在越野车中,多轴车辆的通过性较好,一般车轴在三轴及以上车辆被称为多轴车辆。多轴车辆具有轴距长、质量大、质心高等特点。这就会导致车辆存在低速转向时转向半径大、灵活性差、轮胎磨损严重等问题。
基于多轴车辆存在的问题,全轮转向技术应运而生。全轮转向即车辆所有车轮均参与转向,为保证更佳的转向性能其一般拥有多种转向模式。分布式的线控全轮转向系统(6WS)能够实现六个车轮独立转向,使全轮转向的功能变得更丰富,本文针对6轮独立全轮转向车辆的转向运动特性进行简要分析,并介绍全轮主动转向的控制方法。
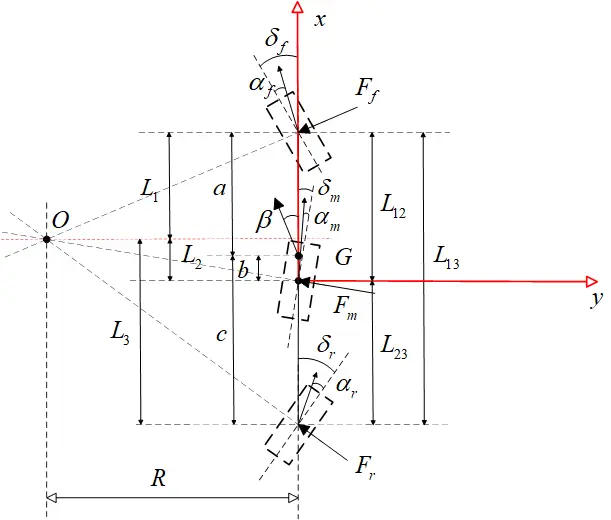
01车辆二自由度模型车辆在该模式下能够完成绝大多数转向任务,采用车辆单轨模型进行车辆动力学建模和全轮转角计算。
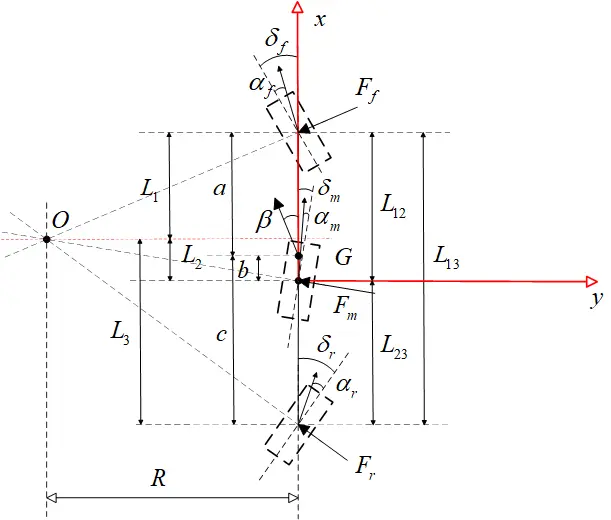
图1 车辆二自由度模型
使用如下车辆二自由度模型:

对于三轴车辆,在假设第一轴转角已知的情况下,第二、三轴转角应满足以下关系:

令角传动比系数:
 (1)
(1)
 (2)
(2)
式中 表示转向中心到第
表示转向中心到第 轴到的距离;
轴到的距离; 表示第二轴到第一轴的距离;
表示第二轴到第一轴的距离; 表示第三轴到第一轴的距离。
表示第三轴到第一轴的距离。
由第二、三轴与第一轴的转角比例系数表达式可知,若计算、 ,首先得到转向中心
,首先得到转向中心 到前轴距离
到前轴距离 的表达式,令车辆的质心侧偏角
的表达式,令车辆的质心侧偏角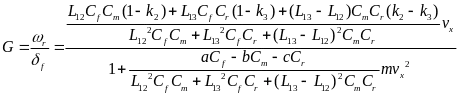 ,质心侧偏角速度
,质心侧偏角速度 ,车辆在稳态转向时横摆角加速度满足
,车辆在稳态转向时横摆角加速度满足 。由多轴车辆在转向时的平衡态可得如下条件:
。由多轴车辆在转向时的平衡态可得如下条件:
 (3)
(3)
 (4)
(4)
将式(5)、(6)代入车辆的二自由度动力学模型中可解得:

在各转角比例系数确定的情况下,每个前轮转角都对应一个转弯半径,由图1中几何关系可得知转弯半径与前轮转角有如下关系:

在求解出 后,代入(1)、(2)式解得、,进一步的,根据式(4)求出
后,代入(1)、(2)式解得、,进一步的,根据式(4)求出 和
和 。根据阿克曼转向几何解耦到每个车轮的转角,运动学关系如下:
。根据阿克曼转向几何解耦到每个车轮的转角,运动学关系如下:


其中,tw表示轮距。在求解出 后,可得L2和L3为
后,可得L2和L3为
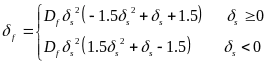
考虑不同速度下的前轮转角值最大值,方向盘转角与前轮转角对应关系满足:
 (5)
(5)
其中,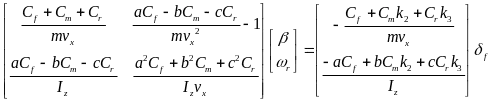 是方向盘转角(定义为-1到1的百分比范围),是前轮转角,Df是模拟的由变角传动比系数和车辆安全性决定的极限前轮转角,做成S曲线的形式可兼顾低速中心区性能与高速稳定性能。
是方向盘转角(定义为-1到1的百分比范围),是前轮转角,Df是模拟的由变角传动比系数和车辆安全性决定的极限前轮转角,做成S曲线的形式可兼顾低速中心区性能与高速稳定性能。
根据车辆稳定性,纵向速度与横摆角速度需满足以下约束条件:
进一步简写成前轮转角大小和纵向速度的约束关系:
做近似取值,上式可写为:

令不同速度下的极限转角为:
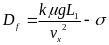
其中, 表示在某个速度下方向盘打满时前轮能转动的最大角度;是安全系数;
表示在某个速度下方向盘打满时前轮能转动的最大角度;是安全系数; 是冗余因数,可构造一个极限角度的软保护功能,以防止该转角Df达到其物理极限值。
是冗余因数,可构造一个极限角度的软保护功能,以防止该转角Df达到其物理极限值。
同理针对倒挡时,还可推得以后轴车轮转角作为输入时转角约束条件:
令极限转角为:
则方向盘转角与后轮转角对应关系满足:
在人工驾驶的情况下,只要输入方向盘转角,由式(5)即可求得当前方向盘转角对应下的前轴车轮转角值,再由式(1)和式(2)即可求得后两轴车轮转角。
04最小转弯半径模式4.1最小转弯半径
对于常规模式下,设车辆前轮的最大转角为45°,由转向几何关系 ,可得此时的转弯半径
,可得此时的转弯半径 =旋转中心到前轴的距离
=旋转中心到前轴的距离 。车辆最小转弯半径与车速的关系如下图所示,横坐标表示车辆纵向速度,纵坐标表示转弯半径。
。车辆最小转弯半径与车速的关系如下图所示,横坐标表示车辆纵向速度,纵坐标表示转弯半径。
图2 不同车速下的最小转弯半径
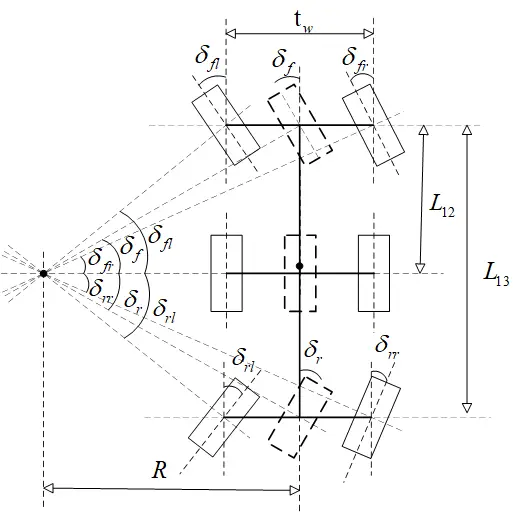
通常过弯时的速度都比较小,以5m/s为例,常规转向模式下车辆的转弯半径在2.1m-2.2m左右。若以车辆几何中心为转向时的旋转中心,则前后轮可同时达到极限值,并且此时中轴保持0转角,如下图所示。此模式下前轮跟后轮同时达到最大转角45°,根据几何关系可得:
此时最小转弯半径即为 。
。
图3 最小转弯半径模式
规定当转弯半径处于1.58m-2.1m之间时,转向模式切换为最小转弯模式,且切换时机只能是在低速行驶阶段,不能在车辆高速行驶途中切换至最小转弯模式,其余场景下均使用常规转向模式。
4.2自动驾驶方案
在最小转弯模式下,由于中轴转角保持为零,车辆的旋转中心位于中轴延长线上,此时前轮转角与转弯半径有如下关系:
因为等轴距的设计方案,后轮转角与前轮转角相等方向相反,可表示为,而中轴不作转角控制,保持在零位,即。但是需要注意,中轴左右的轮速需要做电子差速控制。
4.3人工驾驶方案
人工驾驶方案较自动驾驶方案的不同在于,输入变为方向盘转角,前轮转角的值由方向盘转角映射得到,前轮转角满足:
经过计算得到前轮转角后,采用与前文一样的方法便可求得后轮转角。
05稳态转向增益分析
根据车辆二自由度动力学模型中、,则三轴二自由度全轴转向模型的平衡点满足如下表达式:
将式(4)代入得:
进一步解得车辆稳态横摆增益 为:
为:
来源:智能运载装备研究所
作者:林龙













