UN ECE R13H是欧美日韩等国家广泛认可的M1类乘用车制动要求的统一规定。
R13H法规附件6定义了装有防抱死系统的车辆的试验要求,详情如下:
1 综述
1.1 本附件定义了装有防抱死系统的道路车辆所需的,制动性能。
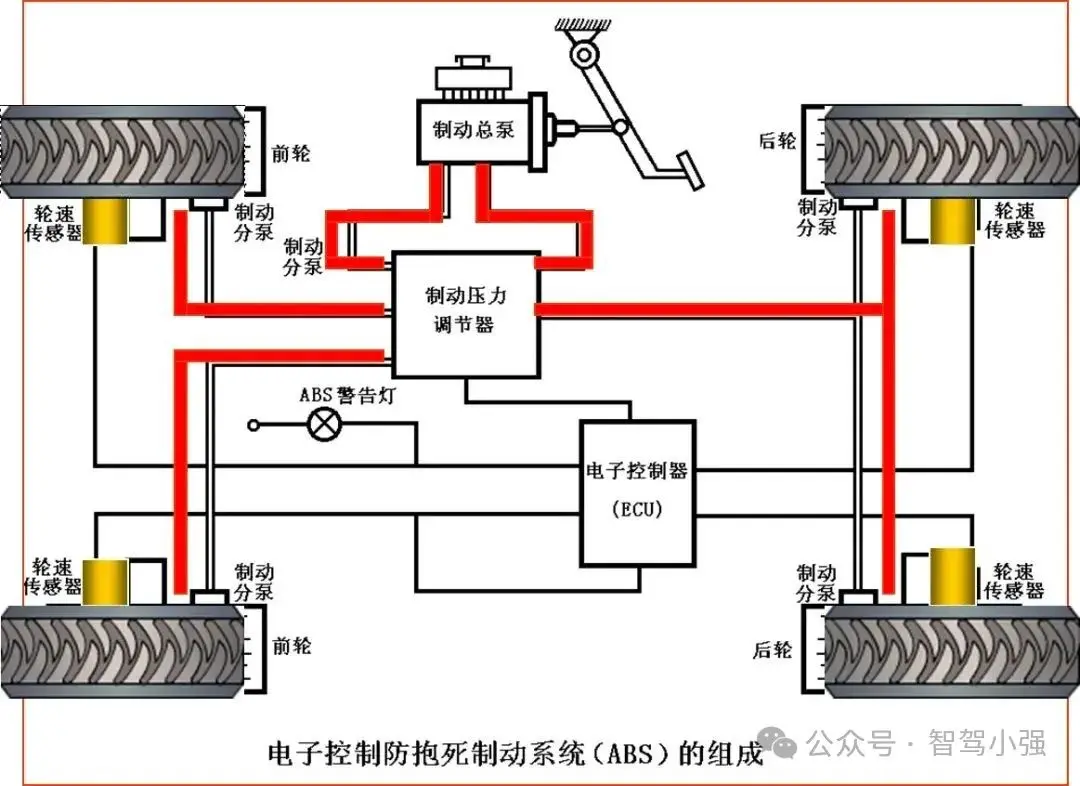
1.2 目前已知的防抱死系统包括一个或多个传感器、一个或多个控制器和一个或多个调节器(执行机构)。任何末来可能引入的不同设计的装置,或者防抱死制动功能集成到另一个系统中的装置,如果其性能等于本附件规定的性能,则应被视为本附件所指的防抱死制动系统。

可以选用不同的方案,法规只对性能提要求。就像R152-AEB一样,不同制造商的感知方案、系统架构都不一样,有单V的、有1R1V的、有3R1V的、有双目的、有大小眼的、有加激光雷达的,没法统一规定,只要满足法规要求的(避撞)性能即可。
2 定义 2.1 防抱死系统anti-lock system
是行车制动系统的一部分,它在制动过程中自动控制车辆一个或多个车轮在车轮旋转方向上的打滑程度。
2.2 传感器Sensor
是指设计用于识别车轮旋转状态或车辆运动状态并将其传输给控制器的部件。
2.3 控制器Controller
是指设计用于评估传感器传输的数据并将信号传输到调节器的组件。
2.4 调节器Modulator
是指根据从控制器接收的信号改变制动力的部件。
2.5 直接控制车轮Directly controlled wheer
是指其制动力根据至少由其自身传感器提供的数据进行调节的车轮。
2.6 间接控制车轮Indirectly controlled wheer
是指其制动力根据其他车轮的传感器提供的数据进行调节的车轮。
2.7 全循环Full cycling
是指防抱死系统在反复调节制动力,以防止直接控制的车轮锁死,在停车时调节只发生一次的制动应用不应被认为符合这一定义。
选择高控制的防抱死系统被认为包括直接和间接控制的车轮;选择低控制的系统中,所有感测到的车轮都被视为直接控制的车轮。
E:轴距。
ε:车辆的附着力利用率,防抱死系统的最大制动速率(ZAL)和附着力系数(k)的商。
εi:在具有3类防抱死系统的车辆情况下,在i轴上测量的ε值。
εH:高附着力表面上的ε值。
εL:低附着力表面上的ε值。
F:力(N)。
Fdyn:动态条件下,防抱死系统作用下路面的法向反作用力。
Fidyn:i轴上的Fdyn。
Fi:静态条件下,路面对i轴的法向反作用力。
FM:机动车辆所有车轮上路面的总法相静反力。
FMnd:机动车辆非制动和非驱动轴上路面的总法向静反力。
FMd:机动车辆非制动和驱动轴上路面的总法向静反力。
FWM:0.01FMnd+0.015FMnd。
g:重力加速度(9.81m/s²)。
h:制造商规定的重心高度,并经过技术服务部门同意。
k:轮胎与路面的粘附系数。
kf:一个前桥上的系数k。
kH:在高附着力表面上确定的k值。
ki:在具有3类防抱死系统的车辆情况下,在i轴上测量的k值。
kL:在低附着力表面上确定的k值。
klock:100%滑移时的附着力k值。
kM:机动车辆的系数k。
kpeak:“粘附-滑移”曲线的最大值。
kr:一个后桥上的系数k。
P:单个车辆质量(kg)。
R:kpeak与klock之比。
t:时间间隔。
tm:t的平均值。
tmin:t的最小值。
z:制动速率。
zAL:具有防抱死系统的车辆的制动速率Z。
zm:平均制动速率。
zmax:最大制动速率。
zMALS:机动车辆在“分割表面”上的zAL。
3 防抱死系统的类型
3.1 如果车辆安装了以下系统之一,则车辆被视为配备了本法规所指的防抱死系统:
3.1.1 第1类防抱死系统
配备1类防抱死系统的车辆应符合本附件的所有要求。
3.1.2 第2类防抱死系统
配备第2类防抱死系统的车辆应符合本附件的所有要求,但下文第5.3.5段的要求除外。
3.1.3 第3类防抱死系统 配备有第3类防抱死系统的车辆应满足本附件的所有要求,下文第5.3.4和5.3.5段除外。在这些车辆上,任何不包括至少一个直接控制车轮的单独车轴应满足本法规附件5的附着力利用条件和车轮锁定顺序,而不是本附件第5.2段规定的附着力利用要求。
但是,如果附着力利用曲线的相对位置不符合本法规附件5第3.1段的要求。应进行检查,以确保在本法规附件5第3.1段规定的制动速率和负载条件下,至少一个后桥上的车轮不会先于前桥或前桥的车轮锁定。这些要求可以在高附着力和低附着力路面(最大约0.8和0.3) 上通过调节行车制动控制力来检查。
4 一般要求
4.1 任何电气故障或传感器异常,如果影响到本附件中的功能和性能要求,包括电力供应、控制器的外部布线、控制器和调节器,应通过特定的黄色光学警告信号向驾驶员发出信号。(主机厂应列出详细故障清单)
4.1.1 在静态条件下无法检测到的传感器异常应不迟于车速超过10km/h时检测到。然而,为防止传感器因车轮不旋转而没有产生车速输出时出现错误故障指示,验证可能会延迟,但不迟于车速超过15km/h时检测到。(防止静止时故障灯误报)
如果故障已经被激活(车速已经达到10km/h或15km/h),当车辆再次静止时,故障警告信号可能会再次亮起,如果此时没有故障,警告信号就应熄灭。
4.1.2 当车辆处于静止状态,刹车防抱死系统ABS通电时,电控气动调节阀应至少循环一次。
4.2 如果发生仅影响防抱死功能的单一电气功能故障,即出现上述黄色警告信号,在发动机断开的情况下,根据0型试验,后续行车制动性能不得低于规定性能的80%。这相当于0.1V+0.0075V ²(m) 的停止距离和5.15m/s²的平均完全减速。
4.3 防抱死系统的操作不得受到磁场或电场的不利影响。这应通过遵守UN ECE R10法规的要求来证明。
传统汽车(无动力电池REESS)需要满足R10.03及后续版本;
新能源汽车(有动力电池REESS)需要满足R10.04及后续版本。
4.4 不得提供手动装置来断开或改变防抱死系统的控制模式。如果在改变的控制模式条件下,车辆配备的防抱死系统类别的所有要求都得到了满足,则允许改变防抱死系统的控制模式。
5 特别规定
5.1 能源消耗
配备防抱死系统的车辆应在长时间刹车踏板踩到底时保持其性能。应通过以下测试验证是否符合此要求:
5.1.1 试验程序
5.1.1.1 储能装置的初始能量水平应为制造商规定的水平。该水平应至少确保车辆满载时行车制动的规定效率。气动辅助设备的储能装置(储气筒)应隔离。
5.1.1.2 从不小于50km/h的初始速度开始,在附着系数为0.3或更小的表面上,满载车辆的制动器应完全施加一段时间t,在此期间,应考虑间接控制车轮消耗的能量,所有直接控制车轮应保持在防抱死系统的控制之下。(认证机构可自行决定使用轮胎的磨损极限和附着系数最高为0.4的表面,应记录获得的实际值值以及轮胎和表面的类型。)
5.1.1.3 然后应停止车辆发动机或切断(打气泵)对储能装置的供应。
5.1.1.4 车辆静止时,行车制动控制系统应连续四次完全启动。 5.1.1.5 当第五次利车时,车辆的刹车应至少具有为满载车辆二次利车规定的性能。
5.1.2 额外要求
5.1.2.1 路面附着系数通本附件附录2第1.1 段所述方法与被测车辆一起测量。
5.1.2.2 制动试验应在发动机断开和怠速以及车辆满载的情况下进行。
5.1.2.3 制动时间t应由以下公式确定:
t=Vmax/7(但不少于15秒)
其中t以秒表示, Vmax以km/h表示的车辆的最大设计速度,上限为160 km/h。
5.1.2.4 如果时间不能在单个制动阶段完成,则可以使用其他阶段,最多总共四个阶段。
5.1.2.5 如果试验分几个阶段进行,试验阶段之间不得供应新能源。
从第二阶段开始,可考虑与初始制动应用相对应的能耗,方法是从本附件第5.1.1.4段 (5.1.1.5和5.1.2.6)规定的四个完全制动中减去一个完全制动。适用时,用于本附件第5.1.1段规定的试验的第二、第三和第四小阶段。
5.1.2.6 如果在第四次完全制动结束时,在车辆静止的情况下,储能装置中的能量水平等于或高于与满载车辆二次制动所需的能量水平,则本附件第5.1.1.5段规定的性能应被视为满足。

5.2 附着力的利用
5.2.1 防抱死系统对附着力的利用考虑了制动距离实际增加超过理论最小值的情况。当满足条件ε≥0.75时,防抱死系统应被视为令人满意,其中ε代表所使用的附着力,如本附件附录2第1.2段所定义。
5.2.2 应在附着系数为0.3⁵或更小、约为0.8(干燥道路),初始速度为50km/h的路面上测量附着力利用率ε。为了消除制动温度差异的影响,建议在确定附着系数K之前确定最大制动率ZAL。 5.2.3 确定附着系数K的试验程序和计算附着力利用率ε的公式应为本附件附录2中规定的程序。
ε=ZAL/K
5.2.4 安装了1类或2类防抱死系统的整车应检查防抱死系统对附着力的利用情况。对于安装了3类防抱死系统的车辆,只有
至少有一个直接控制车轮的车轴
应满足这一要求。
5.2.5 应在车辆满载和空载情况下检查ε≥0.75的满足情况。在制定统一的试验程序之前,可能必须对配备有制动能量回收的车辆重复本段要求的试验,以确定自动功能提供的不同制动分配值对车辆的影响。
如果控制装置上的规定力没有实现防抱死系统的完全循环,则可以省路高附着力表面上的负载测试。
对于空载试验,控制力可以增加到100 daN。如果100 daN不足以使系统循环,则可以省略此测试。

5.3 附加检查
应在发动机断开的情况下,在车辆满载和空载的情况了下进行以下附加检查:
5.3.1 在初始速度V=40km/h和高初始速度v=0.8Vmax≤120km/h的情况下,在本附件第5.2.2段规定的路面上,在制动踏板上突然施加全部力时由防抱死系统ABS直接控制的车轮不得抱死。
此测试的目的是检查车轮是否抱死,车辆是否保持稳定;因此,没有必要在低附着力路面上完全停止并使车辆停止。
5.3.2 当车轴从高附着力表面(KH)经过低附着力表面(KL)时,其中KH≥0.5和KH/KL≥2,在制动踏板上施加全部力的情况下,ABS直接控制的车轮不得锁死。应计算运行速度和制动时刻,以确保防抱死系统在高附着力表面上完全循环的情况下,在第5.3.1.段规定的条件下,以高速和低速从一个表面到另一个表面。
此测试的目的是检查车轮是否抱死,车辆是否保持稳定;因此,没有必要在低附着力路面上完全停止并使车辆停止。
5.3.3 当车辆从低附着力表面(KL) 行驶到高附着力表面 (KH)时,其中KH≥0.5和KH/KL=2,在制动踏板上施加全部力的情况下,车辆的减速应在合理时间内上升到适当的高值,并且车辆不得偏离其初始路线。行驶速度和制动瞬问的计算应使防抱死系统在低附着力表面上完全循环时,从一个表面到另一个表面的通行速度约为50km/h。
5.3.4 本款规定仅适用于装有第1类或第2类防抱死系国统的车辆。当车辆的右车轮和左车轮位于附着系数(KH)和(KL)不同的表面上时,其中KH≥0.5和KH/KL≥2,当以50km/h的速度突然对制动踏板施加全部力时,ABS直接控制的车轮不得抱死。

5.3.5 此外,装有第1类防抱死系统的载货车辆,在本附件第5.3.4段的条件下,应满足本附件附录3规定的制动速率。
5.3.6 然而,在本附件第5.3.1、5.3.2、5.3.3、5.3.4和5.3.5段规定的试验中,应允许短暂的车轮抱死。此外,当车速低于15km/h时,允许车轮抱死;同样,间接控制的车轮在任何速度下都允许锁死,但稳定性和操控性不受影响,车辆不得超过15°偏航角或偏离3.5m宽的车道。
5.3.7 在本附件第5.3.4段和5.3.5段规定的试验中,如果方向盘在最初2秒内的角度旋转在1200以内,且总共不超过240°,则允许进行转向校正。此外,在这些试验开始时,车辆的纵向中间平面应越过高附着力表面和低附着力表面之问的边界,在这些试验期问,外部轮胎的任何部分均不得越过这一边界。
来源:智驾小强













