摘 要
由于电驱传动系统刚性连接,使其呈现出“弱阻尼”状态,这会让纯电动汽车在某些特定工况下容易发生传动系统轰鸣问题。文章以某纯电动汽车蠕行工况轰鸣问题为例,系统地阐述电驱传动系统轰鸣问题的分析排查过程,分析转矩波动抑制失稳导致转矩波动过大是引起蠕行轰鸣的原因,提出电机转矩波动抑制失稳潜在机理及改进的主动阻尼控制策略。结合改进的主动阻尼控制逻辑,在不改变车辆传动系统结构的前提下,通过限制主动阻尼上限的方法,电机转矩波动抑制的失稳现象得到有效控制。并通过实车验证针对轰鸣问题的新主动阻尼控制方法的有效性,这对解决此类问题具有借鉴和参考价值。
关键词:振动与波;纯电动汽车;传动系统;主动阻尼控制;转矩波动;转矩控制;轰鸣
作者:沈龙1,张军2,赵明斌2,秦宾1,方阵2
( 1. 浙江智马达智能科技有限公司,浙江宁波315000;
2. 吉利汽车研究院(宁波)有限公司,浙江宁波315000 )
相比于传统内燃机车,纯电动汽车动力传动链缺少离合器、扭转减振器、液力变矩器或挠性联轴器等柔性减振零件,纯电动汽车传动系统属于高刚度超低阻尼系统。在纯电动汽车低速、低负荷行驶工况下,由于路面状况的随机性、电驱传动系统间隙存在的必然性、控制电机电流的畸变、失真和复杂的动力传动耦合等因素,导致电机转矩、转速波动,从而容易引起整车轰鸣问题,甚至会导致整车抖动问题,严重地影响了整车的舒适性。
沙伟等[1]通过对纯电动汽车电机转速的主动阻尼控制策略开发和实车标定,消除了整车抖动问题。赵治国等[2]通过前馈校正和主动阻尼防抖手段,有效抑制纯电动汽车Tip-In/Out 工况下的齿圈转速波动,减小整车冲击。张剑锋等[3]通过仿真和实车验证表明,主动阻尼控制策略比驾驶性转矩滤波策略能够更好地适应快速的动力响应,并有效解决起步抖动问题。魏敦烈[4]提出了在主动阻尼控制器中加Smith预估器的控制方法,以解决主动阻尼对控制系统固有延时敏感的问题。张军等[5]通过电机转矩过零滤波策略优化和主动阻尼控制改进,解决了纯电动汽车在减速过程中的减速器异响问题。王文楷[6]通过仿真的方法研究了电机转矩波动抑制策略对降低稳态转矩响应的效果。但国内外学者对纯电动汽车蠕行过程中的噪声问题研究较少,缺少系统性的问题分析和工程解决方法。
本文以某电动汽车蠕行工况下车内轰鸣问题为案例,介绍轰鸣问题的测试分析与排查过程,结合主动阻尼控制逻辑,通过电机转矩波动主动阻尼控制策略优化,在不改变车辆传动系统结构的前提下解决轰鸣问题。该案例问题的分析和经验总结对于解决纯电动汽车蠕行轰鸣问题具有较重要的工程参考意义。
1.问题描述
某后驱纯电动SUV蠕行工况车速为7 km/h,当车辆在平直公路蠕行时,主观评价能够听到明显的低频轰鸣声,但车辆未出现抖动或者耸动情况。当车辆蠕行至有上坡或下坡路段时,轰鸣声消失。
纯电动汽车在低速行驶时背景噪声低,路噪和风噪都很小,不能形成掩蔽效应。因此,蠕行时的轰鸣声就很容易被察觉,严重降低车辆的乘坐舒适性。通常,引起车辆轰鸣问题的原因与动力传动系统、行驶系统和车身结构相关,问题排查与分析过程较为复杂。
1.1 整车蠕行轰鸣问题路试测试方案
根据主观评价结果,车辆在坡度路面行驶与平直路面行驶出现明显的轰鸣差异,说明轰鸣与车辆负载和动力传动系统相关。为了进一步分析蠕行轰鸣特征与轰鸣发生时的工况特征,明确轰鸣与电驱传动结构和转矩输出的关联性,分别在电驱总成本体、左悬置(旋变侧)和前悬置主动端、右悬置(齿轮侧)主动端、转向节上布置三向加速度振动传感器,如图1所示。
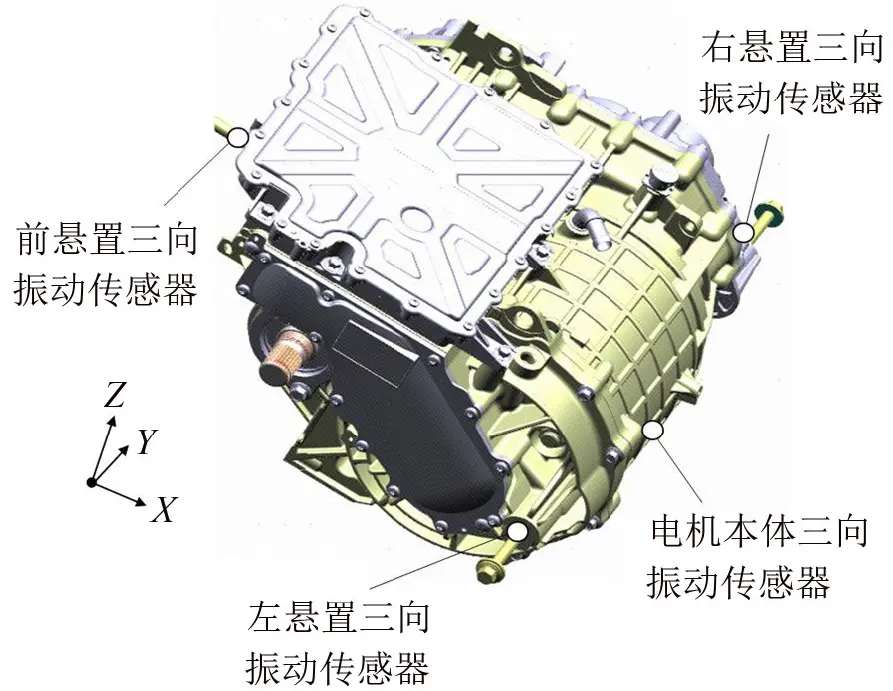
图1 电驱动总成振动传感器布置意图
在驾驶员位置布置拾音器,并通过CAN(多主方式的串行通讯总线)总线同步采集电驱总成的转速、输出转矩等信号。测试工况为在平直光滑路面上以7 km/h 车速匀速行驶,同步采集噪声、振动与总线信号。
1.2 整车路试测试结果分析
车内噪声及各位置振动结果如图2 所示。通过回放及滤波分析测试数据可以得出:
(1) 蠕行时车内的轰鸣问题是以36 Hz为中心频率的噪声,噪声峰值达到42 dB(A);
(2) 电驱本体、3 个悬置主动端及转向节均出现以36 Hz为中心频率的振动峰值;
(3) 振动峰值量级以电驱本体和左悬置主动端最大,右悬置主动端居中,转向节最小。根据测试数据分析结果,初步推断轰鸣噪声是电驱本体产生并主要通过悬置传递。
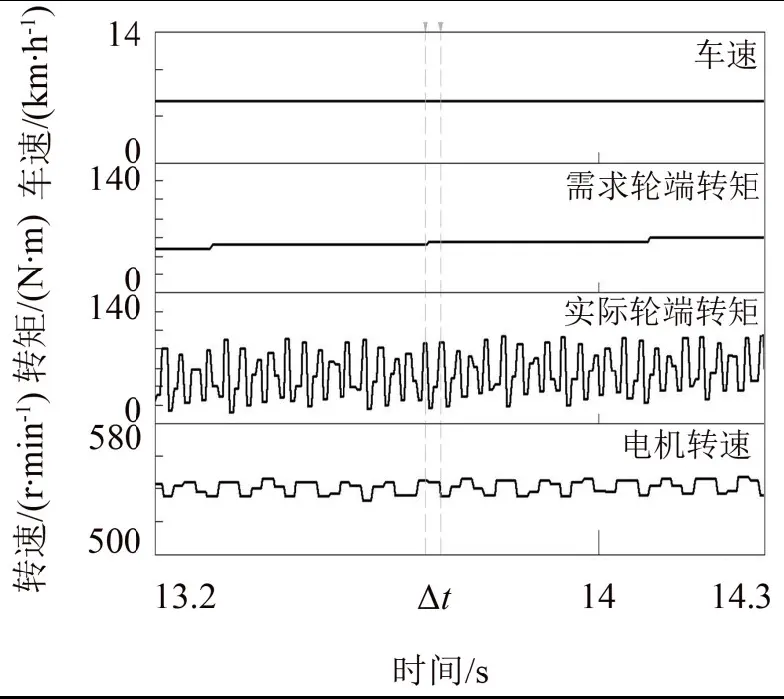
图2 车内噪声与电驱各点振动的频域特征分析
进一步对测试数据的电驱系统转速、轮端转矩、车速信号等进行时域分析,如图3所示。
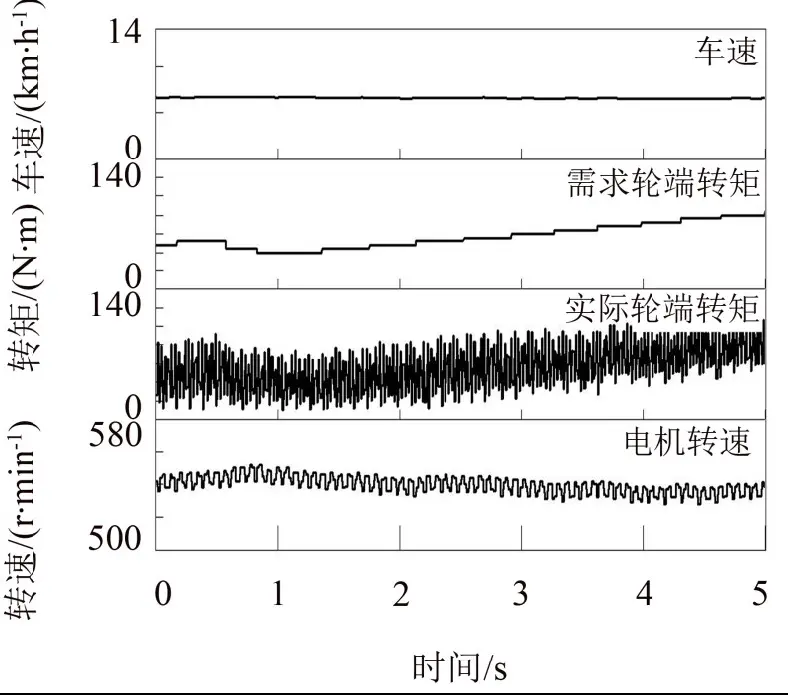
图3 电机转速、车速、轮端转矩时域波形
可以得出:
(1) 轰鸣问题发生时,车速稳定,无明显波动,电机出现10 r/min以内的波动,波动量较小;
(2) 需求的轮端转矩曲线出现2 N∙m以内的波动,需求转矩波动量较小;
(3) 实际的轮端转矩波动量为70 N∙m左右,实际的轮端输出转矩波动量远大于需求目标,初步推断电驱动总成振动是由驱动电机转矩波动产生。
任意截取图3 中1 s 左右时域信号进行放大分析,分析结果如图4 所示,车速、需求轮端转矩、电机转速稳定且波动量小。实际轮端转矩波动峰值之间的时间间隔Δt 为0.027 8 s,根据f=1/T可以计算出实际轮端转矩以36 Hz 为基频波动。根据以上的测试分析结果,可以推测此轰鸣问题与电机转矩波动密切相关,其潜在原因是在车辆蠕行过程中,电机转矩出现剧烈波动现象,由于电驱传动系统“弱阻尼”特性,转矩波动不能被有效衰减,从而引发电驱总成持续振动,振动通过悬置、副车架及悬架系统传递至车内引起轰鸣。
图4 电机转速、车速、轮端转矩时域放大波形
电驱系统产生转矩波动的影响因素较多,电磁设计、机械结构精度、传动间隙、转子刚度等硬件因素和电流畸变、滤波设定、阻尼参数等软件因素均会影响电机转矩的波动。轰鸣问题发生在车辆负载较低的蠕行工况,此时电机转速较低,而对机械精度、转子刚度等硬件要求更为苛刻的急加速、急减速及高速工况并无轰鸣问题,进一步推测引起电机转矩波动的因素与转矩控制软件强相关。
2.转矩波动控制失稳潜在机理验证及改进策略
该纯电动汽车搭载了“三合一”集成式电驱系统,采用8 极48 槽永磁同步电机,转子磁极与定子齿槽如图5所示。
该驱动电机具有4 对极对数,电机转子每旋转一周,会出现4 个振动峰值,即跟踪电机转子转速的振动为4 阶,如图6 所示。结合该纯电动汽车蠕行工况电机以550 r/min 运行,可以计算得到蠕行时电机4 阶振动频率为36 Hz,这与测试得到的振动分析结果吻合。
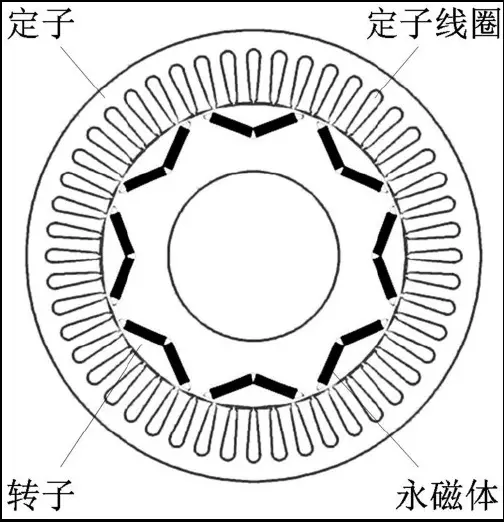
图5 电机极对数示意图
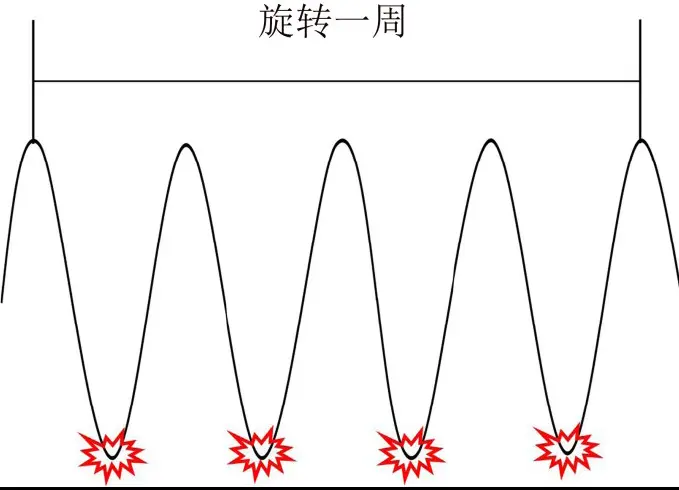
图6 电机4 阶振动示意图
为了抑制电机运行过程中的磁力激励导致的噪声或抖动问题,工程上解决思路一般有以下两种,一种是传递路径优化,比如降低悬置刚度,设计二级隔振等;另一种是降低激励源激励,比如优化齿槽极数、使用短距分布绕组、优化永磁铁励磁磁场分布和使用主动阻尼控制策略等。
2.1 主动阻尼控制机理
电机的转矩是由电磁感应原理产生的电磁转矩,电磁转矩的变化速率与定子里面电流的变化速率同步。定子电流响应为毫秒级,所以电机转矩响应时间大约为几毫秒,因此可以利用电机转矩响应快的特性,将其作为阻尼产生的执行器。如图7 所示,当电机开始出现非期望转矩波动时,为了降低转矩波动,通过对电机输出转矩的调节,来阻断电机转矩波动的延续,以达到利用转矩输出控制来抑制转矩波动的目的。
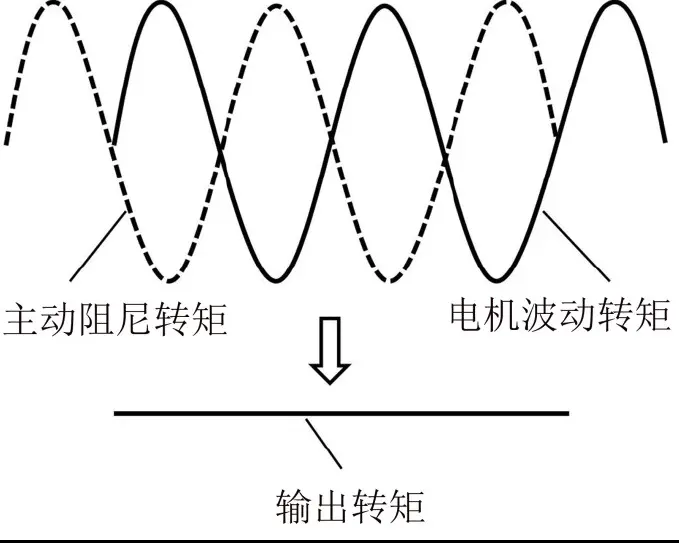
图7 理想主动阻尼抑制转矩波动示意图
如图8 所示,受到电机参数变化的影响,电机转矩波动的抑制效果可能会下降,加上行驶路况瞬时变化,传动间隙的滞回特征,导致抑制转矩波动的转矩不能精确补偿转矩波动,反而加剧了转矩的波动,出现主动阻尼控制转矩波动失稳现象。
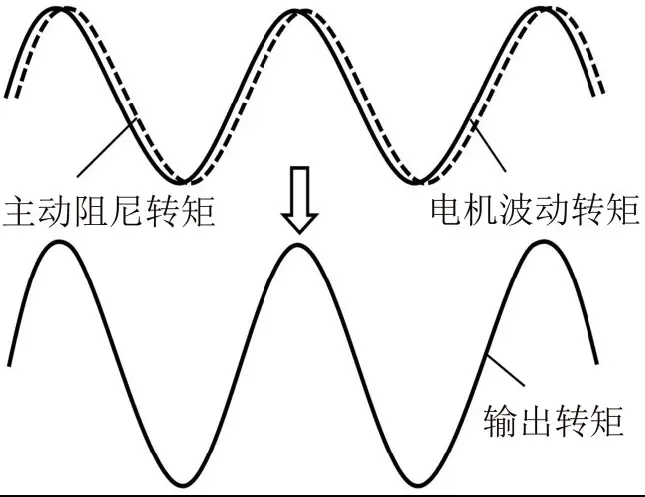
图8 主动阻尼控制转矩波动失稳示意图
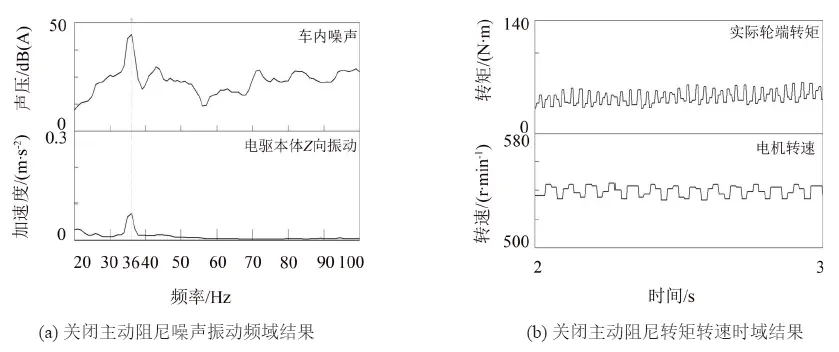
图9 关闭主动阻尼的测试结果
2.2 主动阻尼失稳验证
为了抑制转矩波动,开发过程中在电机控制软件中嵌入了一套主动阻尼控制系统,为进一步验证主动阻尼控制系统对转矩及车内轰鸣噪声的影响关系,关闭主动阻尼系统后,相同条件下进行重复测试,测试结果如图9所示。
关闭主动阻尼过后,相同工况下动力总成本体36 Hz 振动峰值降低至0.1 m∙s-2,车内36 Hz 低频噪声峰值降低至35 dB(A),实际轮端转矩波动降低至20 N∙m,通过主动阻尼关闭对比验证,可以得出:
(1) 关闭主动阻尼后,电驱动总成仍然存在36Hz振动峰值,车内也有36 Hz低频噪声峰值,振动与噪声峰值呈现正相关下降;
(2) 该驱动系统本身存在扭矩波动现象,且引起车内低频轰鸣噪声;
(3) 开启主动阻尼后,不但没有降低转矩波动,反而加剧了转矩波动,转矩波动量与车内低频噪声峰值呈现出正相关性,说明主动阻尼系统是引起车内低频轰鸣噪声的重要原因,推测主动阻尼系统出现了失稳现象。
2.3 主动阻尼控制策略改进
对于电机转矩波动的控制,目前广泛采用闭环的主动阻尼控制策略,即利用电机转矩响应时间只有几毫秒,且转矩响应不存在明显的超调量或滞后量的特性,直接将电机作为转矩波动控制的执行机构。对获取得到的电机实际转速和转矩,进行滤波处理,得到增强的波动分量,计算出参考转速,并根据实际转速与参考转速提取出波动转速,基于波动转速来确定补偿转矩,根据补偿转矩和实际转矩实现主动阻尼控制。从而降低电机转矩波动,典型主动阻尼控制逻辑图如图10所示[7-9]。
然而,纯电动汽车蠕行工况下,由于路面状况的随机性、电驱传动系统间隙存在的必然性、控制电机电流的畸变、失真和复杂的动力传动耦合等因素,会导致主动阻尼控制的失稳,不但不能抑制转矩波动,反而会造成转矩振荡的加剧。基于此逻辑,对主动阻尼的上限加以限制,防止已经有转矩波动的系统进一步扩大转矩的波动,进行实车标定评价,确保新的主动阻尼方案能实现转矩波动的快速收敛。

图10 主动阻尼控制逻辑示意图
3.主动阻尼优化与验证
首先,主动阻尼关闭后车内36 Hz 轰鸣峰值降低7 dB(A),实际轮端转矩波动值降低50 N∙m左右,对现有主动阻尼参数采用插值法,得到多组试验参数。
其次,将各组试验参数再迭代进入新的主动阻尼系统,以降低转矩波动量为目标进行多轮次实车标定最终锁定新的主动阻尼控制参数为:
(1) 将蠕行时对应电机转速范围内转矩输出的主动阻尼增益降低60 %;
(2) 当检测到车辆蠕行时,电机抗波动阻尼转矩上限输出降低80 %,以上参数需要随不同车型进行车型适应性开发和标定确定。
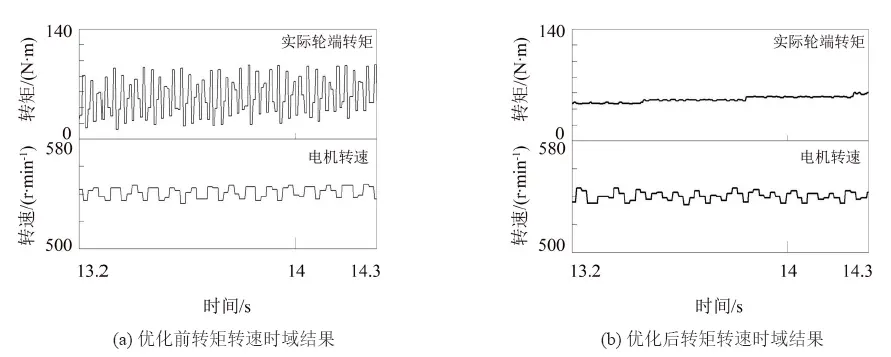
图11 主动阻尼标定策略优化前后转矩转速时域对比
通过主动阻尼参数优化后,进行蠕行工况采集数据进行分析。任意截取采集数据中1 s 左右时域信号进行放大并与主动阻尼参数优化前进行对比分析,分析结果如图11 所示。电机转速优化前后稳定且无明显变化,实际轮端转矩波动值由优化前的70N∙m降低至2 N∙m,波动幅值降幅达到68 N∙m,且主动阻尼参数优化后,实际轮端转矩波动不再明显。
经过对主动阻尼优化后的车辆进行主观评价与客观测试分析,主观评价车辆蠕行时车内轰鸣噪声消失,客观测试结果显示:
(1) 车内36 Hz 轰鸣噪声峰值降低20 dB(A),车内噪声频谱图中36 Hz 峰值现象消失,蠕行轰鸣问题得到解决;
(2) 电驱动本体、左/右悬置主动端、转向节的36Hz振动峰值消失,测试结果如图12所示。
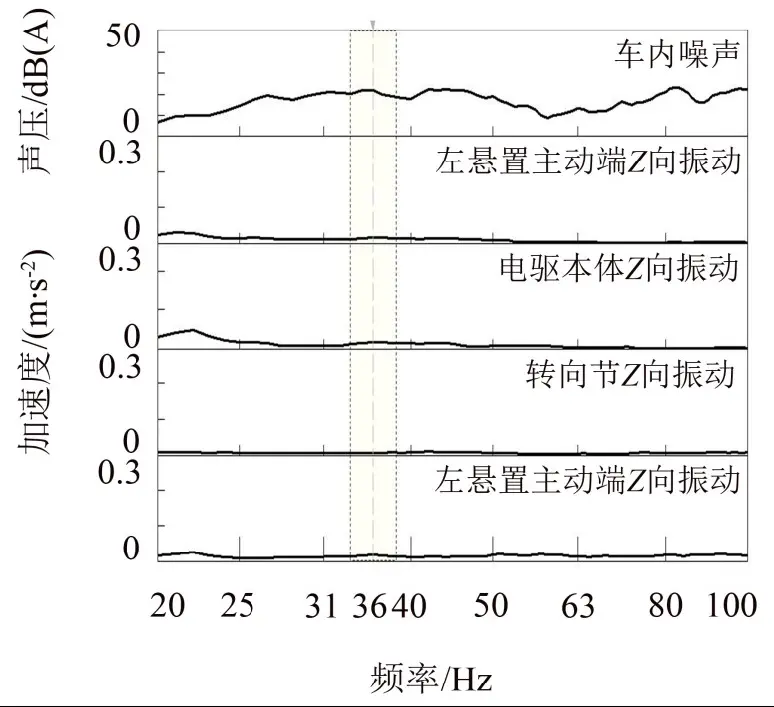
图12 主动阻尼改进后噪声振动客观测试结果
4.结语
电驱传动系统是纯电动汽车的核心,由于电机转矩特性与传动系统结构特点,往往在一些特定工况下会引起轰鸣问题,行业内还缺少系统深入的分析研究。本文以某纯电动汽车蠕行工况下电驱转矩波动引起车内低频轰鸣噪声的问题为案例背景,系统性地进行了轰鸣噪声问题的快速识别与排查,提出了潜在的电驱转矩波动抑制失稳机理与应对控制策略,并通过实车验证了方案的有效性。这对于解决电驱系统引起的车内轰鸣噪声问题具有较为重要的工程参考意义。
此外,由于电驱转矩控制影响因素众多,转矩控制算法较为复杂,需要从转矩波动理论方法、转矩控制底层算法和实车试验标定等方面,开展进一步的理论试验研究,在项目开发前期合理设计电驱转矩控制策略与参数,避免产生电驱系统引起的车内低频轰鸣噪声问题。
参考文献
[1] 沙伟,郭亚子.纯电动汽车电机转速主动阻尼控制策略软件开发及实车标定[J].时代汽车,2019(05):62-65.
[2] 赵治国,王晨,张彤,等.纯电动Tip-In/Out工况的前馈校正与主动阻尼防抖控制[J].汽车工程,2018,40(01):19-27+75.
[3] 张剑锋,叶先军.电动化车辆主动防抖控制策略的研究[J].上海汽车,2020(10):4-7.
[4] 魏敦烈.基于电机转速波动补偿的电动车防抖控制设计[J].汽车零部件,2022(02):39-42.
[5] 张军,黄文兵,窦国伟,等.某纯电动车低速制动工况的减速器异响分析与控制策略优化[J].机械传动,2022,46(05):155-159.
[6] 王文楷. 基于电机转矩波动抑制的电动汽车传动系扭振控制研究[D].吉林大学,2018.
[7] KOU Y S, WESLAT1 F. Development of a hybrid powertrain active damping control system via sliding mode control scheme[C].SAE Technical Papers,2013-01-0486.
[8] Amann N., Bocker J., Prenner F. Active Damping of Drive Train Oscillations for an Electrically Driven vehicle[J].IEEE/ASME Transactions on Mechatronics,
2004,9(4):697-700.
[9] BANG J S, KO Y K, JUNG T H. The active damping control to reduce driveline oscillations for electric vehicles using wheel speeds [C]. SAE Technical Papers,2015-01-1113.
第一作者
沈龙
主任工程师
浙江智马达智能科技有限公司
浙江智马达智能科技有限公司,负责smart全球项目整车NVH性能开发。
E-mail:sl wjstx@126.com
通讯作者
张军
博士,正高级工程师
吉利汽车研究院
上海交通大学博士,正高级工程师,吉利汽车研究院(宁波)有限公司,主要研究方向:汽车NVH性能开发。
E-mail:zj_zmkm@126.com
本文原载于《噪声与振动控制》2024年12月,
受作者授权发布。
来源:汽车测试网
作者:沈龙,张军等






