本节将介绍在[11]电子成像会议上展示的结果。在本实验中,我们使用了93个视频的目录进行测试,并在行人检测(PD)算法之前应用了锐化和对比度。为了得到地面真实结果,对整个目录运行了行人检测算法。为了限制配置空间,已经测试了每种技术的一个滤波器:拉普拉斯滤波器,它有一个参数,有两种可能性,CLAHE技术,有两个参数:剪辑限制:[1,15]和时间大小:8×8或16×16。这里的目标是优化PDkpi:最大化TP率,同时保持尽可能低的FP率。为了实现这一目标,我们建议计算一个折衷值(G),以联合优化TP率(rTP)和FP率(rFP)值:
G = rFP (1 - rFP)
图17的图表显示了每个配置的三个度量值(TPrate、每帧的FP和折衷值)。可以观察到,TP速率值从0.68到0.83不等。每帧的FP变化也很大,从0.039到0.101。
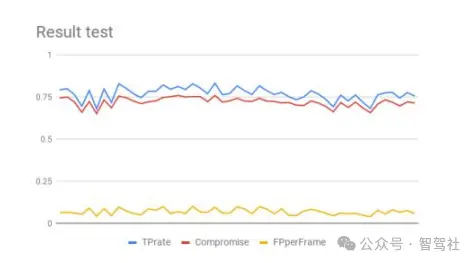
图17:TP率(%)与。每帧的FP作为对比度
在表3中,我们根据TP率和折衷值建立了最佳配置。
表3:原始目录的TP率、FP率和折衷值,TP率的最佳配置和折衷值的最佳配置
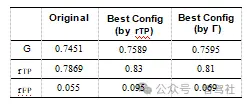
在配置中发现的最佳TP为0.83,比原来的增加了约0.045。通过观察每帧的FP值,可以看到它几乎是原始值的两倍(0.095)。然而,折衷值考虑了TP速率和每帧的FP,这可能是一个更好的度量方法。最后一列显示了kpi值,如果按折衷值排序,最佳TP率为0.81,它大于0.025。在这种情况下,每一帧的FP仍然很低(0.069)。
表4显示了在按TP率或每个折衷值进行排序时找到的最佳配置的参数值。图18显示了由配置按折扣值排序时找到的最佳配置给出的参数值处理的图像。如果我们考虑人类视觉应用,这幅图像的“图像质量”将远远被认为是一个“好看”的图像。
表4.最佳配置的参数

图 18. 使用按折衷值排序时找到的最佳配置(拉普拉斯 8(Lap8),裁剪限制值 = 2 且分块大小 = 8×8)所给定的参数进行锐化和对比度调整后的图像
3.3. 讨论
本次像素级研究获得的结果表明,对图像信号处理器(ISP)流水线的两个模块进行调整会对计算机视觉算法性能产生直观可见且可量化的影响。首先,在应用索贝尔算子(边缘检测)、二值化以及形态学操作之后,可以观察到视觉上的差异。通过计算每种方法的内点百分比,凸显了对特征提取(如尺度不变特征变换(SIFT)、加速稳健特征(SURF)、定向 FAST 和旋转 BRIEF(ORB)以及加速鲁棒特征(AKAZE))性能的影响。
对行人检测算法关键性能指标(KPI)的测试表明,仅通过使用后处理滤波器,算法性能就会出现显著的提升或下降。在逐个应用滤波器的实验中,可以观察到原始图像和处理后图像之间的真阳性(TP)百分比在锐化操作时从 +14.43% 到 -3.2% 不等,在对比度调整时从 +10% 到 -10% 不等。
在针对更大视频样本集所做的最后一项实验中,结果证实了之前得出的结论:“图像质量” 对计算机视觉有着可量化且显著的影响。通过调整这两个滤波器,我们能够在将误报率(FP)维持在较低水平的同时提高真阳性率。这有力地表明,为使计算机视觉算法(包括传统特征提取算法和机器学习算法)获得最佳性能,针对计算机视觉进行图像信号处理器(ISP)调优是一个极具潜力的重要研究领域。
来源:智驾社













