研究通过自然驾驶数据采集、自然驾驶场景重建以及驾驶员风险认知和眼动信息采集三个步骤,构建RISEE数据集。
2.1 基于无人机航拍的自然驾驶数据采集
为了覆盖尽可能多的高交互场景,选择高速公路的匝道汇入段作为采集自然驾驶数据的位置。该路段位于上海市G50沪渝高速公路嘉松中路的入口处,包括主路上的两条车道和匝道上的一条加速车道,如图3所示。
一架DJI Mavic 2 Pro无人机被部署在300米高空进行数据采集。采集完成后,首先使用ArcMap识别车道信息并将其转换为OpenDrive格式。然后,采用YOLOv5进行车辆检测,提取车辆轨迹信息(包括位置、方向、速度和加速度等),并以csv格式存储。
重播图3 无人机航拍自然驾驶场景
2.2 基于SimOne的高交互自然驾驶场景重建通过仿真软件SimOne重建自然驾驶场景,依据自车类型的不同,分别重建了轿车和卡车驾驶员视角的视频。所有视频中均包含驾驶员视角的前视图、左视图和右视图,各视图的相机广角均被设置为60°,能正确匹配驾驶员视野范围,如图4所示。
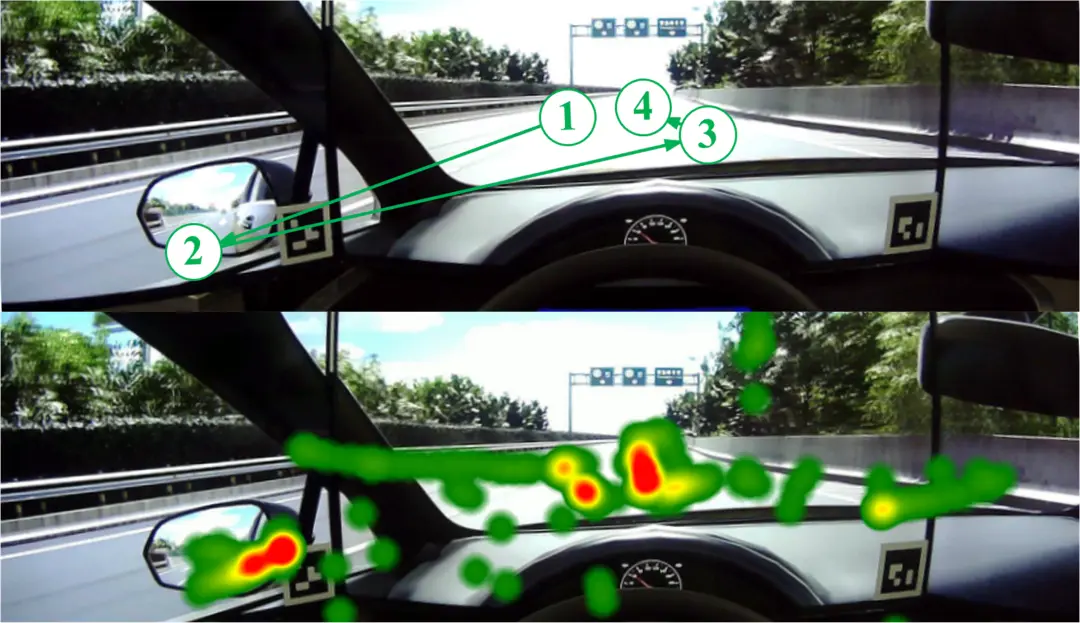
图4 驾驶员第一视角视频(上图为卡车视角,下图为轿车视角)
在仿真软件重建场景的基础上,专门进行了额外的视觉优化。针对车辆外部环境,添加了丰富的交通基础设施作为背景,包括有护栏、广告牌、交通标志牌和监控摄像头等;针对车辆内部,着重渲染仪表盘和两侧后视镜,给被试者提供真实的乘车体验。考虑到真实交通场景中的环境声也会影响被试者风险认知,还基于SumoSound,根据车辆间的相对位置及速度关系生成立体环境声。
上述优化措施确保了生成的场景重建视频,能为被试者提供身临其境的乘车体验。
2.3 基于驾驶模拟器的风险认知及眼动信息采集实验被试者覆盖了不同的年龄段,具有不同的驾驶经验、驾驶频率和驾驶能力。实验过程中被试者被要求坐在驾驶模拟器中,观看视频,对各场景的行驶风险进行评估打分,并通过佩戴头戴式眼动仪实时采集其眼动数据,如图5所示。
将179个场景分为10组,每组包含有17到18个场景。为避免因疲劳而造成评估失误,实验中每个被试者都只被分配观看两组场景。上述设置确保每个场景会被至少20名不同的被试者观看评估。每次观看完一个场景的视频后,被试者会立即在五点李克特量表上反馈其对该场景的主观风险评分。量表范围为从1到5的评分值,对应风险极低、较低、一般、较高和极高的5个等级。
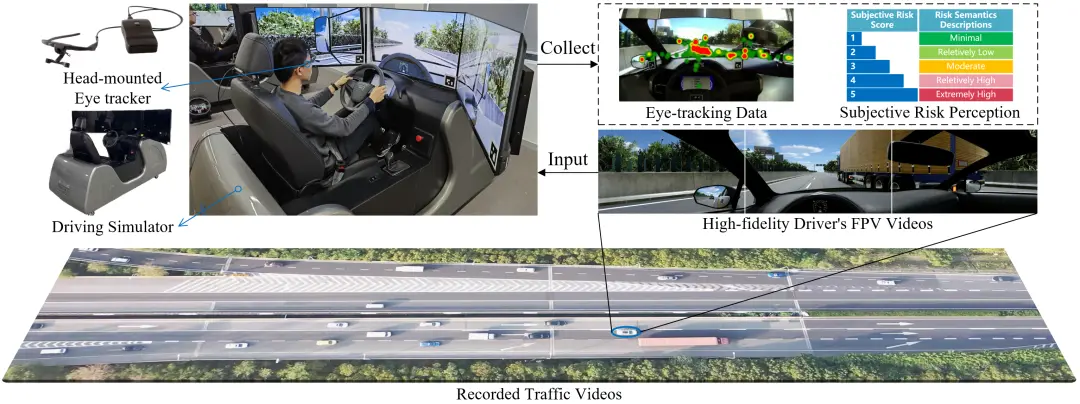
图5 风险认知及眼动信息采集方式
实验中部分被试者评估一致性差,为避免其影响到数据质量,剔除了相关的数据。方法是,在每组场景中,都会插入两个相同的场景且事先不告知被试者。若被试者对相同场景的主观风险评分不一致,且相差超过1,就判定被试者评估一致性较差,其在该场景组下的所有评估数据均被记为无效。另外,因眼动设备在实验过程中存在掉线、卡顿和时间戳不准确等问题,部分眼动数据也被记为无效。
最终,在剔除无效实验数据后,RISEE数据集中共保留101名被试者的3567条主观风险评估以及2045条高质量眼动数据(1名被试者的相关数据因评估一致性差而被舍弃)。
3、示例:场景主客观行驶风险分析
基于RISEE数据集,进一步探索了主客观行驶风险之间的关系。其中,主观行驶风险被定义为不同被试者对同一场景主观风险评分的均值;客观行驶风险被定义为每个场景的最小TTC值(碰撞时间指标,值越小代表风险越高)或最大DNDA值[8](基于可行驶区域的归一化风险评估指标,值越大代表风险越高,0代表无风险,大于0.5代表高风险,1代表已碰撞)。
各场景的主客观行驶风险的频率分布如图6~8所示。为了更好地可视化风险的分布,应用核密度估计(KDE)生成概率密度曲线。主客观行驶风险的分布间存在着显著的差异:客观行驶风险完全是基于车辆运动状态进行评估的,大多处于中低水平;主观行驶风险则考虑了更多因素(如车辆过于接近护栏或其他车辆的变道意图等),这导致更高的认知风险,集中在中等水平。
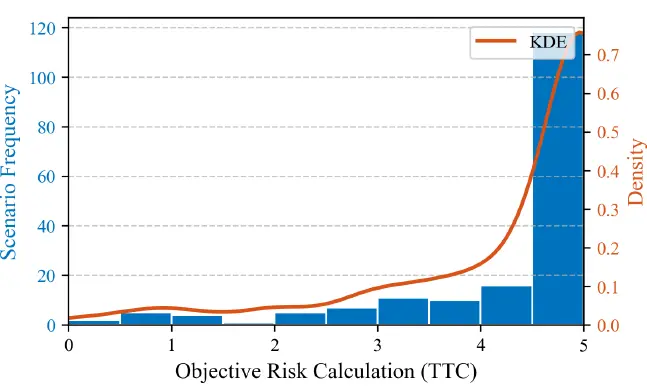
图6 行驶场景的TTC值分布图

图7 行驶场景的DNDA值分布图
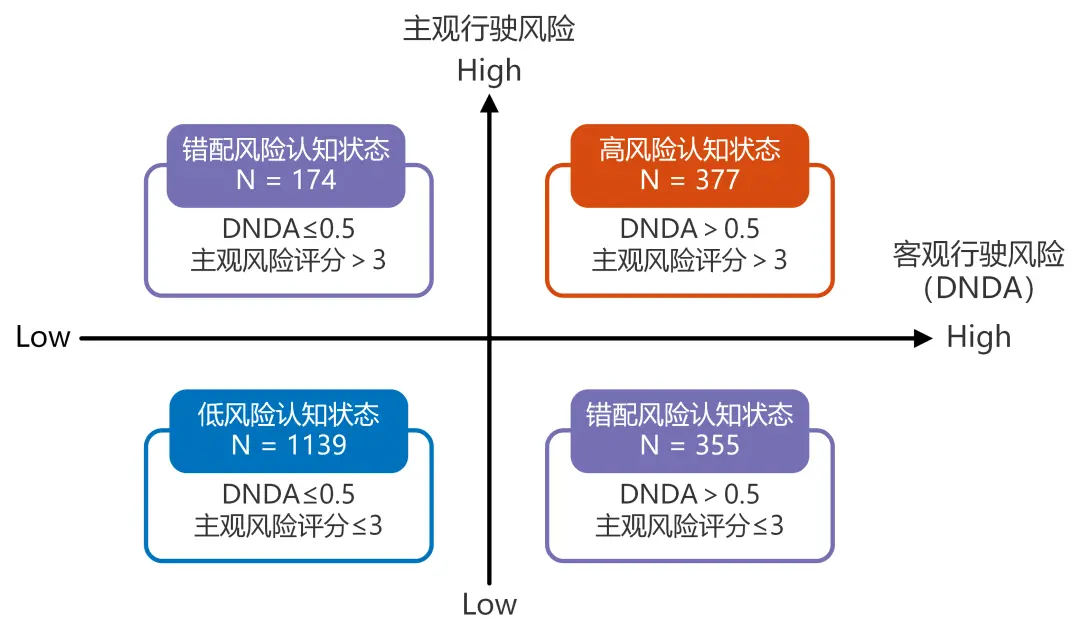
图8 行驶场景的主观行驶风险分布图
来源:同济智能汽车研究所













