目 录
一、自动驾驶域控电磁测试的核心对象
二、自动驾驶域控电磁测试的关键方法
三、自动驾驶域控电磁测试的核心工具
四、总结-自动驾驶域控电磁测试的挑战与优化方向
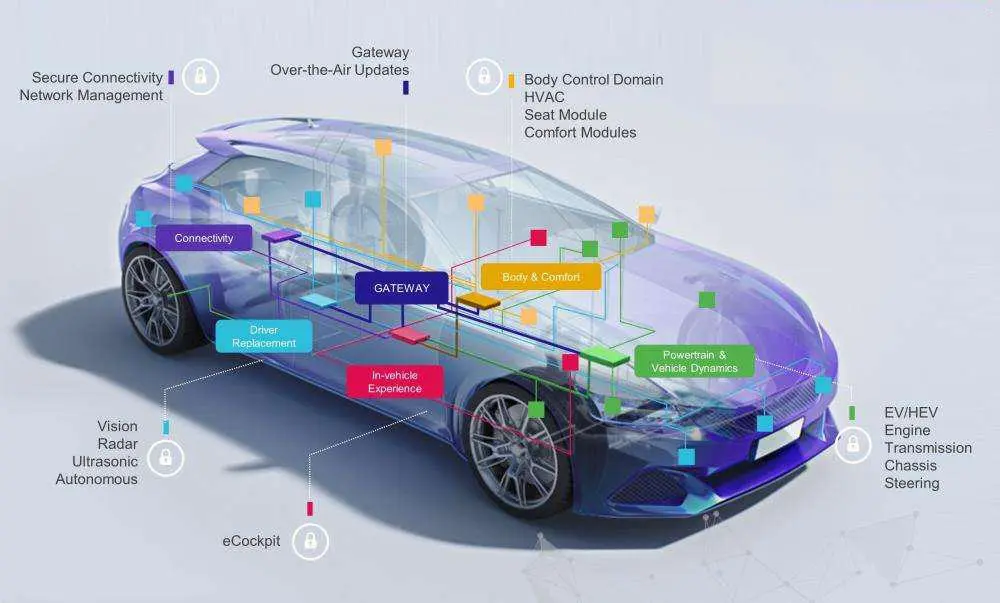
随着自动驾驶技术从 L2 向 L4 级进阶,自动驾驶域控制器(以下简称 “域控”)已成为整合多传感器数据、执行决策控制的核心单元。其需同时处理激光雷达、摄像头、毫米波雷达等多源异构信号,且需与整车 CAN/LIN/ETH 总线、执行器(如转向、制动系统)实时交互,电磁环境复杂度远超传统 ECU。一旦域控受电磁干扰出现功能异常,可能导致路径规划错误、紧急制动失效等严重安全事故。
图 一切电磁干扰的祖师爷--赫兹实验,图片来自网络
因此,针对性开展电磁测试是保障自动驾驶系统可靠性的关键环节。本文将从测试对象、测试方法、测试工具三个维度,全面解析自动驾驶域控电磁测试的技术要点。
一、自动驾驶域控电磁测试的核心对象
自动驾驶域控的电磁测试对象需覆盖“域控本体 - 关联部件 - 信号链路” 全链条,不仅包括域控硬件本身,还需纳入与其交互的关键组件,确保测试场景贴近实际装车工况。

图 自动驾驶域控演进图,无一例外的都是金属外壳作为一种电磁屏蔽手段,图片来自网络
1.1 域控本体核心模块
域控本体是电磁测试的核心载体,其内部集成的高性能芯片、电源模块、通信接口等组件,既是电磁干扰的“发射源”,也是电磁干扰的 “敏感接收端”,主要测试对象包括:
核心计算芯片:如 NVIDIA Orin、Mobileye EyeQ6 等自动驾驶专用芯片,这类芯片采用多核心异构架构,工作频率高达 GHz 级,在数据运算过程中易产生高频电磁辐射;同时,芯片对供电电压稳定性、外部电磁场干扰极为敏感,若受干扰可能出现算力下降、数据丢包甚至死机。测试需重点验证芯片在电磁环境下的运算稳定性、数据处理延迟等指标。
电源管理模块:域控通常需适配整车 12V/24V 低压电源,同时为内部芯片提供 3.3V、5V 等多路精准供电,电源模块的 DC-DC 转换器工作时会产生开关噪声,可能通过电源线传导至其他部件;此外,电源模块若受外界电压波动(如车辆启动时的瞬态高压)干扰,可能导致供电中断,影响域控正常工作。测试需覆盖电源模块的电磁发射水平与抗电压波动能力。
多传感器接口模块:域控通常配备以太网(1000base-T1)、CAN FD、LVDS 等接口,用于接收激光雷达的点云数据、摄像头的图像数据、毫米波雷达的目标检测数据。这些接口的信号传输速率极高(如以太网接口速率达 1Gbps),易受电磁干扰导致信号误码;同时,接口电路自身也可能产生辐射干扰,影响周边传感器信号。测试需验证接口在电磁干扰下的信号完整性、数据传输准确率。
散热模块:高算力域控的功耗可达数百瓦,需通过风扇、散热片等散热模块维持工作温度。散热风扇的电机运转时会产生电磁辐射,且风扇的启停可能导致域控供电电流波动,间接影响其他模块的电磁稳定性。测试需评估散热模块对域控整体电磁性能的影响,避免因散热组件引入额外干扰。
1.2 关联传感器与执行器
自动驾驶域控的功能实现依赖多传感器数据输入与执行器指令输出,若传感器或执行器受电磁干扰,即使域控自身性能正常,也会导致整个系统功能失效。因此,测试需将域控与关键关联部件联动,主要包括:
环境感知传感器:激光雷达(如 Velodyne VLP-16)、摄像头(如 Mobileye EyeSight)、毫米波雷达(如大陆 ARS540)是域控的 “眼睛”。激光雷达的激光发射器与接收器对电磁干扰敏感,若受干扰可能出现点云缺失;摄像头的图像传感器易受高频电磁场影响,导致画面出现噪点、畸变;毫米波雷达的射频电路若受干扰,可能误判目标距离与速度。测试需将传感器与域控连接,模拟实际数据传输场景,验证传感器信号在电磁环境下的稳定性。
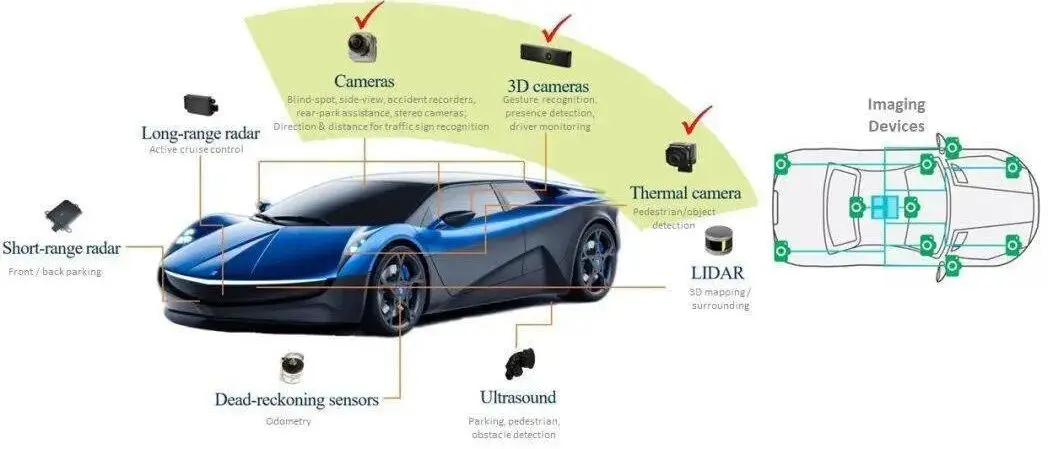
图 自动驾驶的各类传感器(包括比较小众的热成像仪),来自网络
定位与导航模块:GNSS(如北斗、GPS)接收器、IMU(惯性测量单元)为域控提供车辆位置与姿态信息。GNSS 接收器的接收信号强度较弱(通常为 - 120dBm 以下),极易受外界电磁干扰(如车载娱乐系统的辐射)导致定位漂移;IMU 的加速度计、陀螺仪若受振动与电磁耦合干 扰,可能产生测量误差。测试需验证定位模块与域控的数据交互在电磁干扰下的准确性。
图 北斗+GPS导航模块,来自网络
执行器控制单元:域控通过 CAN FD 总线向转向控制器(如博世 ESP hev)、制动控制器(如大陆 MK C1)发送控制指令。执行器控制器的电机驱动电路会产生强电磁辐射,可能通过总线传导至域控;同时,若域控发送的控制指令受干扰出现错误,会导致执行器动作异常(如转向角度偏差)。测试需将域控与执行器控制器联动,验证指令传输的抗干扰能力。
1.3 信号传输链路
域控与关联部件之间的信号传输链路(线束、连接器)是电磁干扰的主要耦合路径,也是测试的重要对象:
高压与低压线束:自动驾驶车辆的高压线束(如电池包至电机控制器)会产生强电磁辐射,可能通过耦合影响邻近的域控信号线;域控自身的低压线束(如电源线、传感器信号线)若未采取屏蔽措施,易接收外界干扰。测试需评估线束的电磁屏蔽效果、抗耦合干扰能力,重点关注线束布局(如高压线束与信号线束的距离)对域控电磁性能的影响。
连接器与接口:域控的传感器接口连接器(如以太网 RJ45、LVDS 连接器)若接触不良或屏蔽层接地不规范,会成为电磁干扰的 “入口” 与 “出口”。测试需验证连接器在插拔、振动工况下的电磁密封性,避免因接口问题导致干扰侵入或泄露。
二、自动驾驶域控电磁 测试的关键方法
自动驾驶域控的电磁测试需在传统 ECU 测试基础上优化测试场景与判定标准,核心方法分为电磁发射(EMI)测试与电磁抗扰度(EMS)测试两大类。 电磁发射是看器件(含电缆)的电磁破坏性和干扰(其他器件)性,电磁抗扰度则是他自己的电磁抗揍性---多大程度的电磁干扰撼动它不得。
2.1 电磁发射(EMI)测试:控制域控的 “电磁污染” 源头
域控的 EMI 测试需重点关注高频信号(如芯片运算、以太网通信)产生的辐射干扰,以及电源模块、散热风扇产生的传导干扰,避免影响周边传感器与电子部件,主要测试方法包括:
2.1.1 高频辐射发射测试(30MHz-6GHz)
传统 ECU 的辐射发射测试频率通常覆盖至 1GHz,而自动驾驶域控的以太网接口、激光雷达数据传输等会产生 1GHz 以上的高频干扰,因此需将测试频率扩展至 6GHz,具体流程如下:
环境准备:在10米法电波暗室中进行(高频信号衰减较大,10 米法可提升测量准确性),暗室需满足 CISPR 25 对场地归一化场地衰减(NSA)的要求;将域控固定在非金属转台上,按实际装车布局连接传感器(如激光雷达、摄像头模拟器)与执行器模拟器,加载典型工况(如 L3 级自动驾驶的高速巡航模式,域控需持续处理多传感器数据并输出控制指令)。

图 10米法电波暗室是个大家伙,图片来自网络
10米法是指将被测设备(如自动驾驶域控)与接收天线 / 发射天线的距离固定为 10 米,以此开展辐射发射(RE)和辐射抗扰度(RS)测试的方法。距离决定了这种电波暗室必须很大。
除了10米法还有5米法3米法,罗列如下:
测试方法
适用对象
场地尺寸要求
测试精度与场景
10 米法
汽车整车、大型域控系统
长≥20 米、宽≥15 米
精度高,模拟整车级电磁环境
3 米法
小型元器件(如芯片、电容)
长≥8 米、宽≥6 米
效率高,适合研发阶段快速测试
5 米法
中型零部件(如单一路由器)
长≥12 米、宽≥10 米
平衡精度与场地成本
设备部署:采用对数周期天线(覆盖 300MHz-6GHz)接收辐射信号,天线与域控的水平距离为 10 米,高度可在 1-4 米范围内调节;使用频谱分析仪(带宽≥6GHz,动态范围≥80dB)记录干扰信号,同时连接数据采集系统,实时监测域控的运算状态与数据输出。
测试执行:转台以 1°/s 的速度旋转(0°-360°),天线每调整 0.5 米高度进行一次频率扫描(30MHz-6GHz),记录每个频率点的辐射干扰值(单位:dBμV/m);针对以太网通信频段(如 1000base-T1 的 100MHz-1GHz)、芯片工作频段(如 Orin 芯片的 1.5GHz-2GHz),需提高频率扫描分辨率(步长≤100kHz),捕捉窄带干扰信号。
结果判定:参考 CISPR 25 Class 5 标准(针对高敏感度电子部件),若 30MHz-1GHz 频段的辐射干扰值≤34dBμV/m(准峰值),1GHz-6GHz 频段≤40dBμV/m(平均值),则判定为合格;若某频段超标,需通过近场扫描仪定位干扰源(如以太网接口电路、芯片散热片),并采取屏蔽(如接口处加金属屏蔽罩)、滤波(如信号线串联高频滤波器)措施整改。
2.1.2 传导发射测试(150kHz-108MHz)
传导发射测试主要针对域控通过电源线、信号线向外部传导的干扰,也就是电线是电磁辐射的污染源,重点关注电源模块的开关噪声与通信接口的共模干扰,流程如下:
环境准备:在屏蔽室中进行,避免外界干扰影响测量;将域控通过人工电源网络(LISN,适配 12V/24V 低压系统)接入直流电源,LISN 需满足 CISPR 25 对阻抗(50Ω/50μH)的要求;连接以太网、CAN FD 等信号线至模拟负载(如以太网交换机模拟器、CAN 总线节点模拟器),模拟实际数据传输场景。
设备部署:使用频谱分析仪(带宽≥108MHz)连接 LISN 的信号输出端,测量电源线传导干扰;对于信号线(如以太网),通过耦合网络(CDN)提取干扰信号,接入频谱分析仪;同时,使用示波器监测域控的供电电流波动,避免因电流突变导致测试误差。
测试执行:从 150kHz 开始,按 1kHz 步长扫描至 108MHz,分别测量 “峰值”“平均值”“准峰值” 三种干扰值;在域控加载不同工况(如 idle 模式、满算力运算模式)时重复测试,对比工况变化对传导干扰的影响;针对电源模块的开关频率(通常为 200kHz-2MHz),需重点监测该频率及其谐波的干扰水平。
结果判定:参考 GB/T 18655-2018 标准,若 150kHz-500kHz 频段的电源线传导干扰≤66dBμV(准峰值),500kHz-108MHz 频段≤54dBμV(准峰值),信号线传导干扰≤60dBμV(准峰值),则判定为合格;若超标,需在电源输入端增加 EMI 滤波器,或在信号线两端增加共模电感。
2.2 电磁抗扰度(EMS)测试:验证域控的 “抗干扰能力”
域控的 EMS 测试需模拟复杂电磁环境(如外界基站信号、高压线束辐射、静电放电),验证其在干扰下的功能稳定性,重点关注多传感器数据处理、控制指令输出的准确性,主要测试方法包括:
2.2.1 高频辐射抗扰度测试(30MHz-6GHz)
自动驾驶域控在行驶过程中会受到 1GHz 以上的高频干扰(如 5G 基站、雷达信号),需扩展辐射抗扰度测试频率至 6GHz,具体流程如下:
环境准备:在 10 米法电波暗室中进行,暗室需配备场强监测系统(误差≤±3dB);将域控与传感器模拟器(激光雷达、摄像头、毫米波雷达)、执行器模拟器(转向、制动控制器)组成闭环测试系统,通过实时仿真平台(如 dSPACE)模拟自动驾驶场景(如城市道路跟车、环岛通行),域控需输出连续的控制指令。
设备部署:采用功率放大器(输出功率≥100W,覆盖 30MHz-6GHz)与发射天线(双锥天线 30MHz-300MHz,对数周期天线 300MHz-6GHz)产生干扰电磁场;使用场强监测天线校准域控所在位置的场强(按标准要求设定为 20V/m-40V/m,模拟不同电磁环境等级);通过数据采集系统实时监测域控的运算延迟、数据丢包率、控制指令误差。

图 外观很有辨识度的双锥天线作为干扰源,来自网络
测试执行:按 30MHz-6GHz 频率范围扫描,每个频率点停留 10s,注入 “连续波” 干扰(模拟持续电磁场)与 “脉冲调制波” 干扰(模拟突发干扰,调制频率 1kHz,占空比 50%);在关键频段(如 5G 通信的 3.5GHz 频段、激光雷达的 905nm/1550nm 对应的射频频段),需提高场强(如增至 60V/m)进行极限测试;测试过程中,若域控出现数据丢包率>1%、控制指令误差>5%,需记录对应的频率与场强。
结果判定:若在测试频率范围内,域控的运算延迟≤100ms、数据丢包率≤0.1%、控制指令误差≤2%,且无死机、重启现象,则判定为合格;若出现异常,需分析干扰耦合路径(如通过天线接口、屏蔽缝隙),并采取接地优化(如域控外壳单点接地)、信号隔离(如传感器信号采用光耦隔离)措施。
2.2.2 静电放电(ESD)抗扰度测试
静电放电可能来自人员维修操作(如触摸域控接口)、衣物摩擦等,需验证域控在接触放电与空气放电下的稳定性,流程如下:
环境准备:在静电放电测试室中进行,地面铺设导电地板(接地电阻 10^4Ω-10^6Ω),墙面为接地金属板;将域控固定在绝缘支架上(高度 0.8m),连接电源与负载,加载正常工况(如处理激光雷达点云数据);使用监控系统(如 CAN 总线分析仪、图像采集卡)实时监测域控的输出信号。
设备部署:采用静电放电模拟器(符合 ISO 10605 标准),配备接触放电枪(放电电阻 330Ω,电容 150pF)与空气放电枪(放电电阻 330Ω,电容 150pF);根据域控的安装位置与材质,设定放电电压(接触放电 6kV-8kV,空气放电 15kV-25kV,模拟不同静电等级)。

图 接触式放电枪,模拟静电放电,来自网络

图 接触放电和击穿空气的空气放电的对比,来自网络
测试执行:对域控的外壳、接口(如以太网接口、电源接口)、散热孔等部位进行放电测试:接触放电时,放电枪头直接接触测试点,每次放电间隔 1s,每个测试点放电 10 次;空气放电时,放电枪头与测试点保持 5mm 距离,按同样方式放电;测试过程中,若域控出现功能中断、数据错误,需记录放电部位与电压。
结果判定:若在设定放电电压下,域控无功能异常(如数据正常传输、控制指令无误),且测试后能正常恢复工作,则判定为合格;若出现异常,需在接口处增加静电保护器件(如 TVS 二极管),或优化外壳屏蔽(如缝隙处加导电泡棉)。
三、自动驾驶域控电磁测试的核心工具
自动驾驶域控的电磁测试工具需具备“高频覆盖、高精度测量、多场景模拟” 的能力,涵盖测试环境搭建、干扰信号生成、数据监测分析等环节,关键工具如下:
3.1 测试环境工具
10 米法电波暗室:用于高频辐射发射与抗扰度测试,核心参数包括:频率覆盖 30MHz-6GHz,归一化场地衰减(NSA)误差≤±2dB,静区尺寸≥2m×2m×2m(确保域控与关联部件可完全置于静区内);配备吸波材料(如羰基铁粉吸波体,在 1GHz-6GHz 频段的吸波性能≥20dB),可有效吸收反射信号,避免测试误差;典型设备如德国 R&S 的 TS8995 暗室系统,支持自动场强校准与频率扫描。
屏蔽室:用于传导发射测试,需满足 GB/T 18655 对屏蔽效能的要求(30MHz-1GHz 频段屏蔽效能≥80dB);内部配备可调节非金属支架(用于固定域控与测试设备)、接地系统(接地电阻≤1Ω);典型设备如美国 EMC Test Design 的 EMC-ST 系列屏蔽室,支持快速组装与拆卸,适配不同尺寸的域控测试。
图 屏蔽室其实就是屏蔽钢板做的“铁盒子”,来自网络
静电放电测试室:用于 ESD 测试,需具备防静电地面、墙面,以及温度(23℃±3℃)、湿度(45%-55%)控制功能;配备静电电压表(测量精度 ±5%),可实时监测测试环境的静电电压;典型设备如瑞士 Haefely 的 ESD Test Chamber,符合 ISO 10605 标准要求。
3.2 干扰信号生成与测量工具
频谱分析仪:用于 EMI 测试中的干扰信号测量,核心参数包括:频率范围 30Hz-6GHz,动态范围≥90dB(避免强信号掩盖弱信号),分辨率带宽(RBW)可调节至 1Hz-1MHz(适配不同频段的测试需求);支持 “峰值”“平均值”“准峰值” 三种测量模式,可自动记录超标频率点;典型设备如美国 Keysight 的 N9040B UXA 信号分析仪,具备实时频谱分析功能,可捕捉瞬态干扰信号。
功率放大器:用于 EMS 测试中的干扰信号放大,需覆盖 30MHz-6GHz 频率范围,输出功率需根据测试场强需求匹配(如 10 米法暗室中生成 40V/m 场强,需功率放大器输出功率≥100W);关键指标包括线性度(三阶交调失真≤-40dBc)、带宽平坦度(±1dB),避免放大过程中信号失真影响测试准确性;典型设备如美国 AR 的 500W 系列功率放大器(如 AR 1000T),支持自动增益控制,可与信号发生器联动实现精准场强输出。
信号发生器:用于生成 EMS 测试所需的干扰信号,需支持 “连续波”“脉冲调制波”“调频波” 等多种信号类型;频率覆盖 1kHz-6GHz,输出信号幅度分辨率≤0.1dB,调制深度可调节(0%-100%);针对自动驾驶域控的特殊场景,需支持 5G 通信频段(3.3GHz-3.6GHz)、激光雷达射频频段(如 800MHz-1GHz)的信号生成,模拟真实干扰源;典型设备如德国 R&S 的 SMW200A 矢量信号发生器,可生成复杂调制信号(如 QPSK、16QAM),适配高频抗扰度测试需求。
人工电源网络(LISN):用于传导发射测试中隔离电网干扰、提取域控电源线的传导干扰,需适配整车 12V/24V 低压系统,阻抗满足 CISPR 25 标准(150kHz-108MHz 频段为 50Ω//50μH);支持单路或多路供电(如 4 路 LISN 可同时测试域控的主电源与辅助电源),插入损耗≤0.5dB,确保干扰信号无衰减传输;典型设备如瑞士 EM Test 的 ESL 系列 LISN,配备过流保护功能,避免域控上电冲击损坏设备。
耦合去耦网络(CDN):用于传导抗扰度测试中,将干扰信号耦合至域控的电源线或信号线,同时实现干扰信号与测试系统的隔离;需覆盖 150kHz-200MHz 频率范围,耦合衰减≤3dB,去耦衰减≥40dB;针对以太网、CAN FD 等高速信号线,需使用专用 CDN(如以太网 CDN 支持 1Gbps 传输速率),避免影响信号正常传输;典型设备如美国 Teseq 的 CDN 系列,支持多接口适配(如 USB、RJ45),满足域控多类型信号线测试需求。
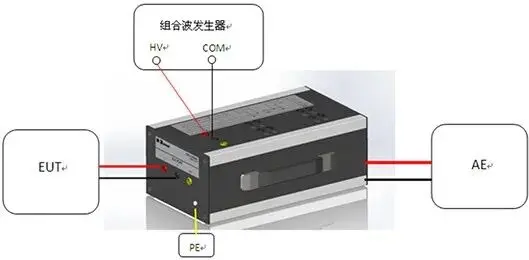
图 耦合去耦网络(CDN),来自网络
3.3 数据监测与分析工具
自动驾驶域控电磁测试需实时监测多维度数据(如运算状态、信号完整性、控制指令),并通过专业工具分析干扰与功能异常的关联,核心工具包括:
实时仿真平台:用于模拟自动驾驶场景,为域控提供真实的传感器数据输入与执行器反馈,常见设备如德国 dSPACE 的 SCALEXIO 平台;可集成激光雷达模拟器(如 Continental RSUB)、摄像头模拟器(如 VI-grade DeltaSim),生成符合 ISO 21448 标准的场景数据(如行人横穿、车辆加减速);测试过程中,可实时记录域控的决策输出(如转向角度、制动压力),对比干扰前后的功能差异,定位敏感干扰频段。
总线分析仪:用于监测域控与执行器之间的 CAN FD、以太网等总线通信状态,典型设备如德国 Vector 的 CANoe;支持 1Gbps 以太网、5Mbps CAN FD 数据采集,可实时解析协议帧(如 DoIP、SOME/IP),统计数据丢包率、延迟抖动(≤1ms 精度);当域控受电磁干扰时,可捕捉总线错误帧(如 CRC 错误、位错误),分析干扰对通信的影响程度;同时支持自动化测试脚本编写,实现多轮干扰测试的数据分析自动化。
信号完整性测试仪:用于评估域控传感器接口(如 LVDS、MIPI)的信号质量,典型设备如美国 Keysight 的 DSOX 系列示波器(带宽≥4GHz,采样率≥16GSa/s);可测量信号的眼图(眼高、眼宽)、抖动(时间抖动≤1ps 精度)、上升沿 / 下降沿时间,判断电磁干扰是否导致信号失真;例如,激光雷达 LVDS 信号受干扰时,眼图会出现闭合,抖动值超过 100ps,可通过测试仪量化干扰影响,指导整改方向。
数据分析软件:用于整合测试数据(如干扰频率、场强、域控功能参数),生成可视化报告,常见软件如美国 National Instruments 的 DIAdem;支持多格式数据导入(如 CSV、TDMS),可通过趋势图、频谱图展示干扰与功能异常的关联(如某频率点场强升至 40V/m 时,域控数据丢包率骤增);同时具备数据对比功能,可分析整改前后(如增加屏蔽罩后)的测试结果差异,验证优化效果。
四、总结-自动驾驶域控电磁测试的挑战与优化方向
随着自动驾驶技术向 L4/L5 级发展,域控的算力密度(如 NVIDIA Orin 达 200TOPS)、传感器接口数量(如 16 路以太网)持续提升,电磁测试面临三大核心挑战:一是高频干扰(如 6GHz 以上毫米波雷达信号)的测量难度增加,现有暗室吸波材料在高频段(>6GHz)吸波性能衰减(≤15dB),需优化场地设计;二是多传感器协同场景下的干扰耦合路径复杂(如激光雷达与 5G 模块的互扰),传统单一部件测试无法覆盖系统级干扰,需构建整车级电磁测试环境;三是测试周期长(单台域控完整测试需 72 小时),难以满足快速迭代需求,需推动自动化测试技术(如 AI 驱动的干扰源定位)发展。
针对上述挑战,未来优化方向可聚焦三点:其一,研发高频段测试设备(如 18GHz 电波暗室、毫米波功率放大器),提升 6GHz-18GHz 频段的测试能力,适配下一代毫米波雷达、卫星通信的电磁测试需求;其二,构建 “域控 - 传感器 - 执行器” 系统级测试平台,模拟整车电磁环境(如高压线束辐射、多 ECU 协同干扰),实现从部件级到系统级的全链路测试;其三,引入数字孪生技术,通过域控三维电磁模型仿真干扰分布,提前预判潜在电磁风险,减少物理测试次数,将测试周期缩短 50% 以上。
而且,需要说明的是,这些测试都是概然性的,而非必然性的,直观说其实是在抽样测试,限于成本和周期不可能绝对的覆盖到方方面面,那么如何在有限的测试实操中发现无限的问题,尽可能覆盖无限的潜在测试面,这又是AI发挥作用的新领域。
来源:汽车电子与软件
作者:直观解






