5.2. 基于EMB系统的车辆稳定性控制
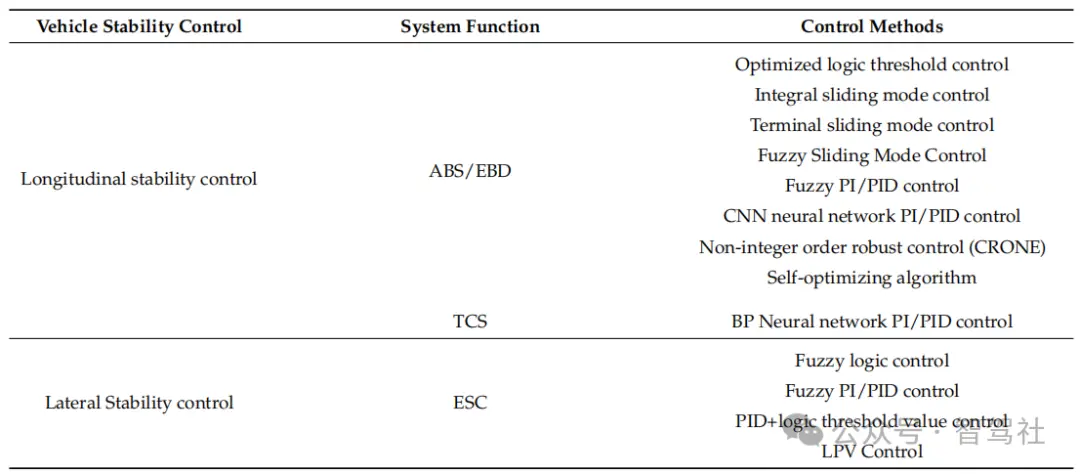
车辆稳定控制是指车辆在突然转向、道路激励突变等紧急情况下,在驾驶或制动过程中保持稳定运行的能力。基于EMB系统的优点,如高精度和快速响应,以及电子控制,更容易结合先进的复合辅助驾驶控制算法,更好地保持车辆的稳定性,实时监控和跟踪车辆的运行状态,并进行反馈调整。一般来说,稳定控制可以分为纵向稳定控制和横向稳定控制。现有的基于EMB系统的车辆稳定控制方法见表14。
表14. 基于EMB系统的车辆稳定性控制方法
(1) 在纵向稳定性控制方面,燕山大学的徐采用逻辑阈值控制方法实现了防抱死制动系统(ABS)的应用。逻辑阈值控制方法是依据车轮加速度和滑移率的阈值来控制制动压力的增减及维持,从而使车轮滑移率能维持在最佳滑移率附近,以获取最佳地面制动力。仿真结果表明,基于机电制动(EMB)系统的防抱死制动系统(ABS)控制更为精确、高效且能耗更低。重庆大学的夏和李 基于夹紧力反馈信号能够实现制动转矩连续闭环控制这一特性,提出了一种优化的逻辑阈值控制方法。在防抱死制动系统(ABS)控制过程中,依据车辆滑移率和制动减速度,直接给出制动转矩增减的梯度,以实现制动转矩的调整,将滑移率控制在稳定区间内。逻辑阈值控制方法不涉及数学模型,具有响应速度快、成本低的优点。然而,其设计与调试较为复杂,且控制过程不稳定。此外,由于其开关特性,它无法始终保持在最佳滑移率状态。
韩国科学技术院的李等人 通过纵向加速度控制器(PI)计算预期电机转速,以此动态控制夹紧力,并运用轨迹更新算法解决控制器与目标之间的相位滞后问题,使其趋近预设的预期加速度曲线。这样一来,在低风险制动条件下,能够实现在停车前减少制动输入,从而提高乘坐舒适性。江苏大学的董、田];华中科技大学的张;湖南大学的张 ;吉林大学的韩 、杨和李等人提出了一种模糊 PID 复合控制方法来实现防抱死制动系统(ABS)/ 电子制动力分配系统(EBD)(如图 37 所示)。将预期最佳滑移率与实际滑移率之间差值的微分输入到模糊控制器中,依据模糊规则生成 PID 控制的比例、积分和微分参数,进而能够对制动力进行反馈控制。这种控制方法不仅具备 PID 控制精度高的优点,还拥有模糊控制鲁棒性强的优势。吉林大学的唐、饶,江苏理工学院的王以及南通大学的沈等人通过将 BP(反向传播)或 CNN(卷积神经网络)神经网络与 PID 控制相结合,实现了防抱死制动系统(ABS)/ 牵引力控制系统(TCS)的控制。将车辆纵向速度、车轮速度、预期最佳滑移率与实际滑移率的差值及其变化率输入到 BP 或 CNN 神经网络后,也可通过神经网络学习获得 PID 控制器的三个参数,进而进行反馈控制,这使得控制更加精确,且具有良好的跟踪适应性。
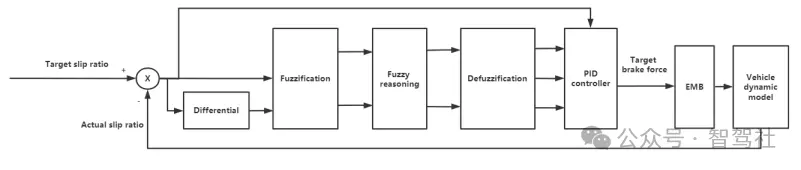
图 37. 采用模糊 PID 控制方法的防抱死制动系统(ABS)控制框架
西华大学的黄 和长安大学的张通过模糊滑模控制方法实现了防抱死制动系统(ABS)的控制。首先,通过滑模控制器将滑移率作为控制对象,使运动点始终位于基于最佳滑移率生成的滑模面上,然后进一步设置模糊控制校正器,对滑模控制器的输出进行模糊化处理,以便依据模糊控制规则对控制值进行优化。经过这些过程后,利用去模糊化输出控制制动力。因此,有效抑制了常规滑模控制的抖振现象,同时保持了滑模控制的鲁棒性。西北工业大学的梁等人 基于滑模控制提出了一种自适应非奇异快速终端滑模(NFTSM)控制方案,该方案利用径向基函数(RBF)神经网络方法解决了估计系统中复杂干扰上界的难题,降低了滑模切换增益设计的保守性,并有效消除了抖振。
波尔多大学的贝宁 - 内托(Benine - Neto)等人设计了一种具备防抱死制动系统(ABS)功能的新型非整数阶鲁棒控制器(CRONE)。其基于频域控制的线性化模型使其能够跟踪车轮的参考角速度,并在车辆质量、路况等不确定参数存在的情况下,显著降低由测量噪声引起的控制输入波动。
伊希克大学的丁奇曼(Dinçmen)等人提出了一种防抱死制动系统(ABS)控制器的极值搜索方案。通过开发一种自优化算法和观测器设计,在无需估计路况的情况下,能够使道路车辆在紧急制动条件下的制动力达到最大。
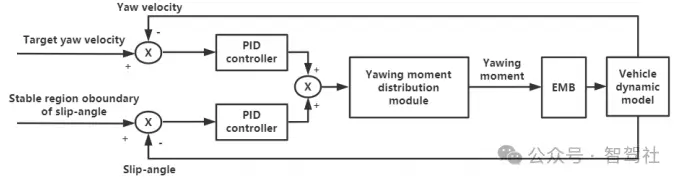
(2) 在横向稳定性控制方面,密歇根大学的向等人分析了线控制动系统的系统架构和容错设计,研究了利用差动制动转矩控制横向和横摆稳定性的有效性。因此,提出了一种模糊逻辑控制方案,该方案根据车辆状态和路况将最优制动转矩施加到不同车轮上,从而实现横向和横摆稳定性控制,并且通过车辆制动模型的仿真验证了该控制方案的有效性。
来源:智驾社













