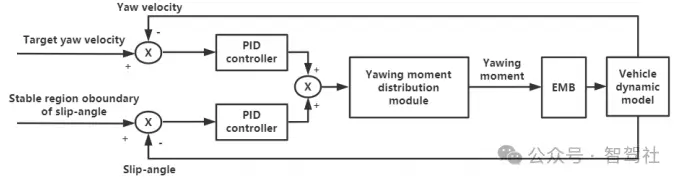
图 38. 采用 PID 控制方法的电子稳定控制系统(ESC)控制框架
费尔加尼(Fergani)等人 提出了一种基于横向稳定性监测系统的线性变参数(LPV)控制方法,该方法能够以一种简单的方式在性能目标之间实现平滑过渡并处理非线性问题,同时保持足够的鲁棒性,以更好地维持车辆稳定性。
综上所述,机电制动系统(EMB)的应用使得高阶控制辅助算法的耦合成为可能。因其线控制动系统的特性,它不仅确保了通用性和高稳定性,还具备集成度高、能耗低、响应快等优势。这保障了整车的稳定性控制,为车辆的电动化和智能化发展奠定了基础。
5.3. 基于机电制动系统(EMB)的先进驾驶辅助先进驾驶辅助是指通过感知技术获取周边环境信息,然后经过数据处理与分析向驾驶员发出警报或主动介入协助驾驶员进行应急处理,以此提高车辆行驶过程中的安全性和可靠性。基于机电制动(EMB)主动制动能力的车辆动力学控制是当前研究的重点,旨在实现诸如自适应巡航控制(ACC)、自动紧急制动(AEB)等先进辅助驾驶功能。
吉林大学的杨等人 [109] 搭建了一个带有虚拟现实功能的机电制动(EMB)与自适应巡航控制(ACC)离线仿真平台,对节气门位置采用 PI 控制,对制动控制采用模糊 PID 控制。在两种典型跟车工况的虚拟仿真下,他们初步探究了基于机电制动(EMB)的自适应巡航控制(ACC)功能。吉林大学的牟 [3] 基于机电制动(EMB)的多级闭环控制算法建立了纵向动力学分层控制框架,包含自适应巡航控制(ACC)和自动紧急制动(AEB)系统(如图 39 所示)。下层控制部分依据车辆纵向动力学方程设计目标制动压力、目标驱动转矩以及驱动与制动之间的切换控制策略,而上层控制部分则设计了定速巡航 PID 控制器、自主跟车线性二次型调节器(LQR)控制器,以及自动紧急制动(AEB)安全距离模型和分层制动控制策略。此外,通过仿真验证了纵向动力学控制策略的有效性。山东交通学院的徐 [110] 基于三闭环控制策略精确控制机电制动(EMB)的夹紧力,建立了基于滑移率的防抱死制动系统(ABS)模糊 PID 控制器,并采用基于碰撞时间的碰撞时间(TTC)碰撞策略作为自动紧急制动(AEB)控制算法,对集成机电制动(EMB)的自动紧急制动(AEB)功能进行了仿真验证。
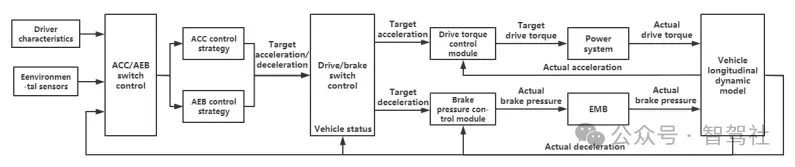
图 39. 基于机电制动(EMB)的自适应巡航控制(ACC)/ 自动紧急制动(AEB)系统控制框架
江苏大学的苗 [111] 设计了一种基于楔式机电制动(EMB)的防抱死制动系统(ABS)与自动紧急制动(AEB)联合作用的控制方法。执行系统采用逻辑阈值控制方法,将滑移率作为自动紧急制动(AEB)控制的第二个逻辑阈值,结合防抱死制动系统(ABS)对输出制动转矩进行调整,以增强制动稳定性。最后,在四种不同类型的路面上,通过联合仿真验证了制动系统的性能。
6. 结论
作为线控制动系统的一种完备形式,机电制动(EMB)系统具有诸多优势,例如响应迅速、制动力控制精确以及易于集成控制等。同时,它也仍然存在一些问题,比如冗余性差、成本高以及热干扰严重等。通过总结各制造商提出的现有结构方案,可得出以下结论:
对于行车制动模块,运动转换通常以丝杠传动(尤其是滚珠丝杠和滚珠丝杠副)的形式实现。此外,主要采用减速机构(以行星齿轮系为代表)或增力机构(以楔形自增力机构为代表)来解决电机驱动力不足的问题。
对于驻车制动模块,根据常用的不同驱动部件,可分为三种类型:手动式、电机驱动式和螺线管驱动式。其中,螺线管驱动式方案因其结构简单紧凑已成为主流方案。
对于制动间隙补偿模块,根据所使用部件的材料特性,可分为三种类型:柔性型、刚性型、柔性与刚性结合型。其中,柔性与刚性结合的补偿机制结合了前两种方案的特点,使得制动间隙的控制更加精准可靠,补偿过程也更加平稳。
对于快速回位模块,通常采用扭簧、压缩弹簧或其他弹性元件来储存弹性能量,实现制动力的快速释放。
关于机电制动(EMB)执行器的夹紧力估算与控制算法,以及机电制动(EMB)系统在智能驾驶中的应用研究,当前的研究进展和未来的研究前景如下:
在夹紧力估算方面,分别有基于电机角位移、电机电流以及角位移与电流融合的三种方法。它们大多仍采用近似模型进行拟合,在温度、摩擦等干扰因素方面鲁棒性不强。还需进一步开发强鲁棒性的状态估计算法。
在夹紧力控制方面,目前主要采用串级 PID 控制算法,也包括鲁棒控制、模型预测控制、滑模控制等其他算法。鉴于机电制动(EMB)系统具有非线性时变特性,运用自适应智能控制算法来实现制动力的精确调整是当前研究的一大趋势。
目前,机电制动(EMB)系统在智能驾驶中的应用研究主要集中在车辆稳定性控制方面,关于其在先进驾驶辅助方面的应用研究较少。机电制动(EMB)系统在 L3 - L5 级自动驾驶车辆的横向和纵向动力学控制中的应用将是未来研究的重点。
来源:智驾社













