在近日易车网举办的“AEB超级评测大会”上,25款主流智能电动车在模拟“地库下坡儿童嬉戏”场景的测试中,全部未能成功刹停,撞上了坐在路面上玩耍的儿童假人。测试车速为10 km/h,但无一车辆成功避让,部分车型甚至直接碾压儿童假人,暴露出当前智能驾驶技术在复杂场景下的感知与决策能力存在明显不足。
作为智能驾驶系统中最基本、最关键的能力之一,主动刹车避让功能若连这类日常生活中常见的场景都无法应对,那所谓的智能驾驶又从何谈起?面对这样的表现,用户又怎能对其安全性和可靠性抱有信心?
测试背景与场景设置
此次评测大会由易车网主办,旨在通过1:1还原的真实高危工况,全面评估主流智能电动车在五大典型场景下的AEB(自动紧急制动)性能。这五大场景包括:
水马锥桶大挑战:模拟施工区域,考验车辆对不规则障碍物的识别与制动能力。
地库下坡儿童嬉戏:模拟地下车库坡道盲区内儿童玩耍,测试车辆在复杂环境下的感知与反应能力。
假人组团鬼探头横穿:模拟多名行人突然横穿马路,挑战车辆的快速识别与制动反应。
隧道盲区故障车自燃:模拟隧道内视线受阻情况下的紧急情况,考察车辆的应对能力。
暗夜逆光儿童鬼探头:模拟夜间逆光环境下儿童突然出现,测试车辆在恶劣光线条件下的识别与制动性能。
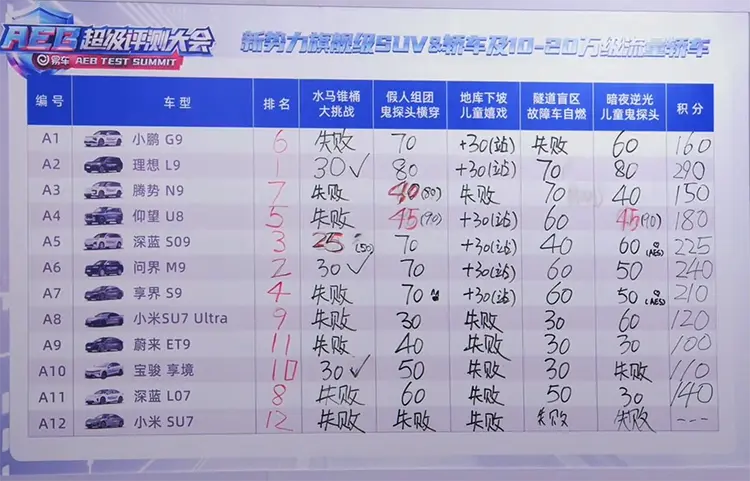
在“地库下坡儿童嬉戏”场景中,所有测试车辆均未能成功识别并避让坐在路面上的儿童假人,显示出当前AEB系统在复杂、低速、视线受限的环境下的感知与决策能力亟待提升。尽管部分厂商曾高调宣称自家技术“遥遥领先”,但在此次测试中,其多款车型在面对常见场景时依然未能避让儿童假人,暴露仅是在个别场景中略胜一筹,远未达到全面可靠的智能驾驶水平。
部分车型在其他场景中的表现
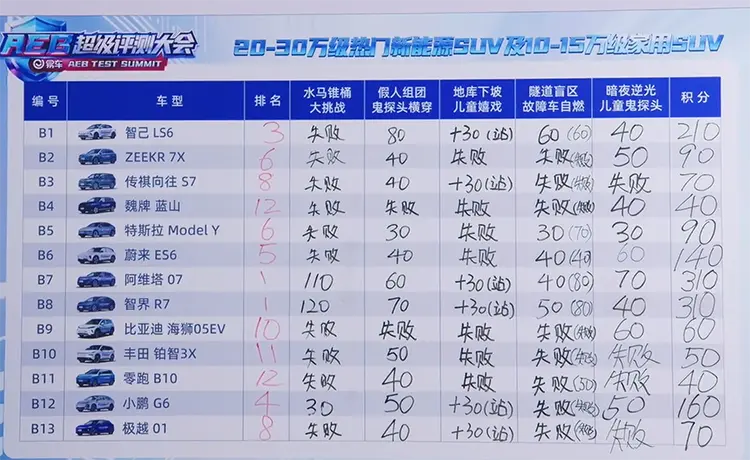
虽然在“地库下坡儿童嬉戏”场景中表现不佳,但部分车型在其他测试场景中展现出一定的优势。例如,某款车型在“水马锥桶大挑战”中以120 km/h的速度成功刹停,表现出色。然而,在“暗夜逆光儿童鬼探头”场景中,其刹停成绩仅为40 km/h,显示出在不同场景下性能的不稳定性。(具体结果参照上图所示)
另一款车型在“暗夜逆光儿童鬼探头”场景中表现较好,刹停速度达到70 km/h,但在“隧道盲区故障车自燃”场景中,其刹停成绩却下降至40 km/h,进一步凸显出当前智能驾驶系统在多变复杂场景下的适应性问题 。

可以看出,易车网此次面向公众的AEB测试,通过真实工况的严苛验证,用数据揭示了当前智能驾驶技术的局限性。这场测试不仅撕开了智能驾驶光鲜宣传背后的技术短板,也让外界对其所谓的“智能”有了更清晰的认知。从测试结果来看,多款热门车型在关键场景中接连“翻车”,当前智能驾驶技术在面对复杂多变的实际道路环境时,仍存在显著的短板。尤其是在低速、视线受限、光线复杂等场景下,AEB系统的感知与决策能力亟需提升。
而回顾近年来各大车企的市场宣传,不难发现,不少品牌在智能驾驶的推广上语不惊人死不休。从“零接管驾驶”到“全场景自动辅助”,从“解放双手办公”到“全民进入智驾时代”,甚至有企业声称2025年将是“智能驾驶的元年”。这类口号层出不穷,似乎智能驾驶已触手可及,技术发展已近完美。
然而,这类言论是否与现实相符,值得质疑。有分析指出,某些企业在明知技术尚处于发展初期、实用性和安全性远未成熟的情况下,依旧不惜夸大宣传,极力渲染“自动驾驶”概念。此举除了争夺市场关注、扩大品牌影响力,也有可能是借助话题性吸引资本和消费者。至于一旦出现事故或技术失效的后果,责任则多半被转嫁给驾驶员个人。
在这样的营销模式下,用户不仅成为尚未成熟技术的“早期测试对象”,更是在智能系统失效时最直接的风险承担者。种种迹象表明,智能驾驶的发展道路仍充满挑战,在技术尚未成熟之前,消费者理应保持谨慎态度。理性看待智能驾驶当前的能力边界,才是保障行车安全的关键。
来源:汽车测试网












