
图6. 模拟可变磁阻传感器输出的旋转信号。
将转动仿真任务从CPU上剥离出来有许多好处。首先,使用专用硬件,APU可以高速运行,不受高级实时操作系统任务(如线程调度程序)的干扰。为了在10,000 rpm下实现0.1度 的分辨率下,转动仿真必须至少以600,000 Hz的频率运行,这在通用CPU上是不可能实现的。
其次,APU和CPU可以异步运行。这可允许CPU以固定的时间步进间隔运行物理对象模型,有助于提高许多对象建模和实时OS工具链的工作效率,同时获得来自APU协处理器的基于角度的信息。
最后,通过将APU放置在靠近I/O引脚的位置,可以在转动仿真和相关数据之间建立低延迟连接,以关联到仿真的位置值。事件发生的时间及其与位置相关的时间之间的延迟会直接导致测量误差。为了避免这一误差,可以将APU放在与I/O相同的FPGA芯片。
评论 0

同类信息
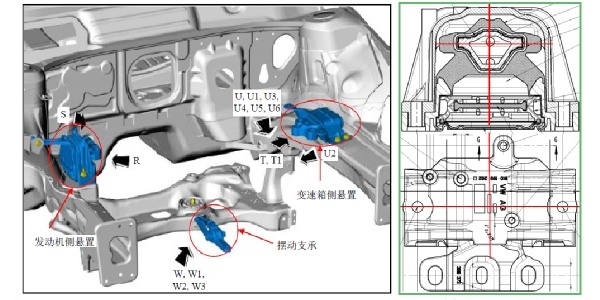
- 动力总成悬置系统疲劳强度试验标准的研究
2021-10-08
从极限竞速到未来出行新科技 Kistler车辆动力学测量技术至关重要
如今,技术的进步和移动出行的兴起,让人们的生活变得更快、更高效。近数十年来,能够精确采集车辆动力学被测变量的测量技术取得了巨大进步,并将在车辆优化中继
2020-12-2515545
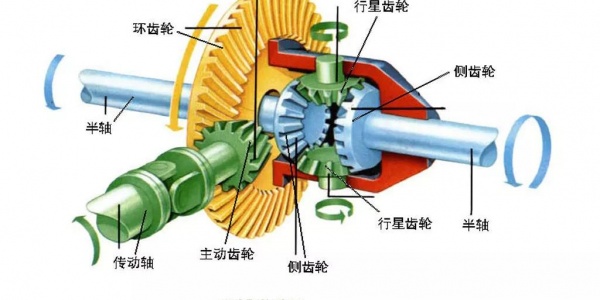
- 新能源动力总成差速器测试
2020-12-07
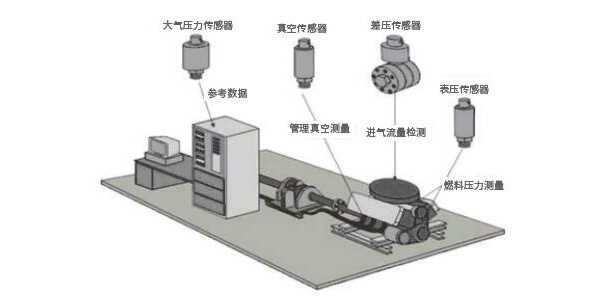
- 福禄克公司发动机及排放测试解决方案
2020-04-28
- 汽车手动变速器齿轮啸叫问题试验探究
2020-01-20

- Hyundai Kefico缩短了15%的测试时间-NI案例分析
2019-10-13
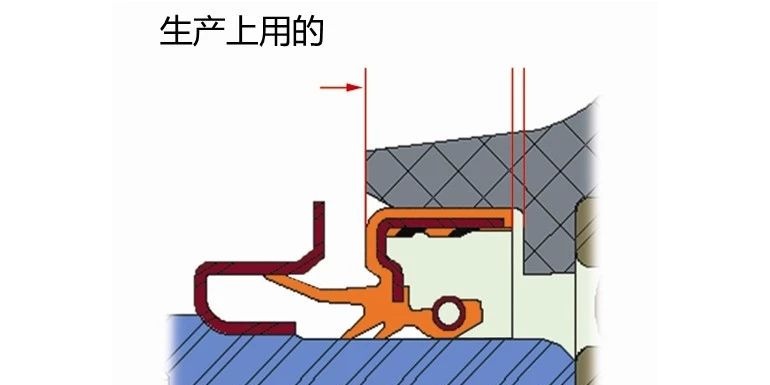
- 混合动力驱动系统油封选型与试验验证
2019-06-29
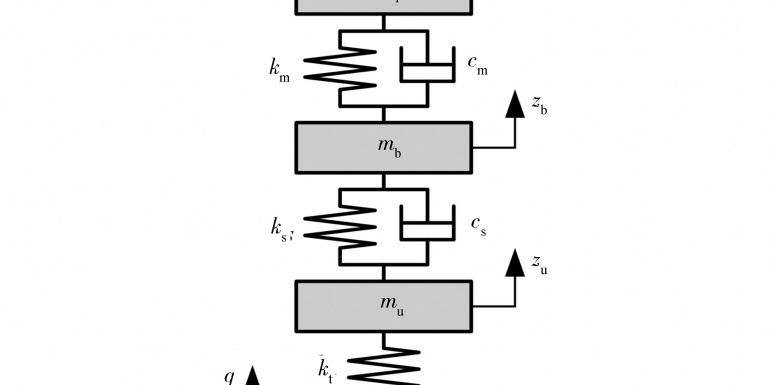
- 动力总成悬置系统对汽车动力学性能的影响
2019-06-11
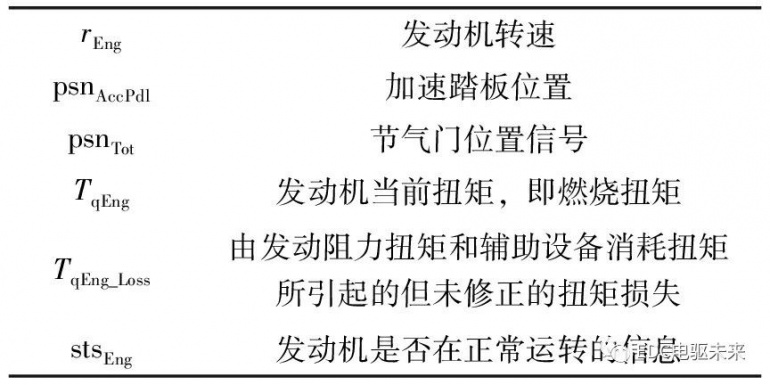
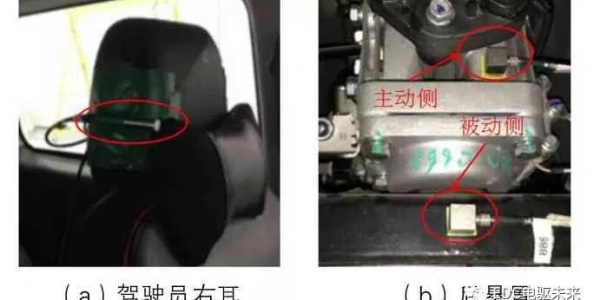
- 基于发动机转速和扭矩信号的离合状态识别研究
2019-06-09
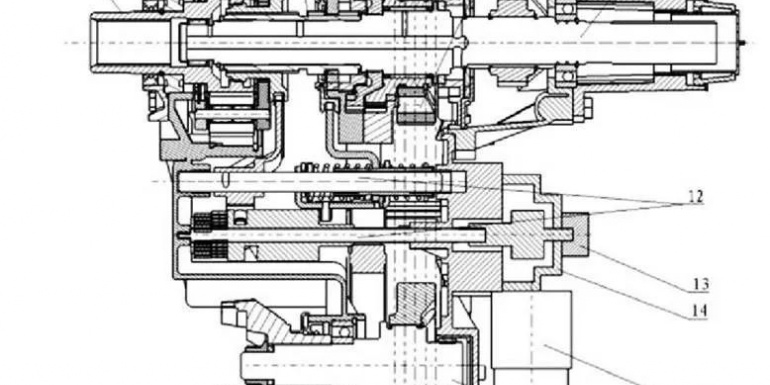
- 一款全时四驱电控分动器总成的开发介绍
2019-05-16


