摘要
当前的动力传动系统主动噪声控制(ANC)系统不足以跟踪快速的发动机转速变化,并且不能为单个发动机提供一致的收敛速度,从而在较宽的频率范围内实现平衡的降噪性能。这是因为大多数ANC系统配置有标准的滤波x最小均方(FxLMS)算法,由于次级路径模型的存在,该算法在频率相关的收敛行为中具有固有的局限性(从控制扬声器输入到监测误差麦克风输出的电声路径)在参考信号路径中。本文首先概述了几种最近改进的FxLMS算法,以提高谐波响应的收敛速度,如特征值均衡FxLMS(EE-FxLMS)然后,提出了一种改进的FxLMS算法,称为逆模型LMS(IMLMS)算法,作为主动传动系噪声控制的基础。该算法通过利用次级路径的逆模型实现,在自适应滤波器输出端级联或加入参考信号发生器,以最小化其动态对算法收敛性的影响。验证为了验证该算法的有效性,还对实测的动力总成噪声响应进行了数值模拟。结果表明,在单个发动机阶数下,收敛速度相当,在较宽的发动机转速范围内,噪声明显降低。
1 引言
在过去的二十年中,有源噪声控制(ANC)技术得到了广泛的研究和发展。最近,这项技术的商业化已经发展并扩展到许多工业噪声控制应用领域。特别是,在过去五年中,一些主要原始设备制造商发布了许多带有内置ANC模块的车型。这背后的一个主要情况是,ANC解决方案是传统被动噪声控制(PNC)方法的有效替代方案,特别是对于降低低频动力传动系统和道路噪声。ANC的基本思想是驱动多个执行器(扬声器),以产生与车辆产生的噪声不同步的声音,从而通过破坏性干扰对其进行衰减。该技术利用了发动机和道路噪声的声波传播特性,在中低频(长波)噪声控制方面具有独特的优势。此外,它提供了一种动态调整声谱的有效方法,而不是简单地抑制声压级以获得更好的音质。因此,它在学术界和工业界都是一个很有吸引力的话题。
公开文献中报告了大量关于车辆内部噪声ANC的研究,如动力传动系统相关噪声和道路噪声。这些应用主要用于封闭空间,如车辆内部驾驶室。此外,ANC已应用于车辆外部排气噪声的衰减。多篇研究论文都提出了主动消声器的概念。例如,Ziegler和Gardner就发动机排气管有源消声系统的设计获得了早期专利。他们的控制系统采用前馈控制,与发动机转速同步,单位为每分钟转数(rpm)。尽管上述报告成功实施了ANC以改善整体NVH(噪音、振动和不平顺性)性能,但当前的动力传动系ANC系统可能不足以为单个发动机提供一致的收敛速度,也不足以跟踪快速的发动机转速变化。这是因为这些ANC系统中的大多数是通过采用标准滤波x最小均方(FxLMS)算法的自适应滤波器实现的,由于滤波后参考信号自相关矩阵的特征值扩展,尤其是在存在二次路径模型的情况下,它表现出与频率相关的收敛行为。本文将回顾ANC系统设计和算法开发的最新进展,以及它们在动力传动系噪声控制中的潜在应用,以便进一步了解ANC在车辆上的性能。此外,还利用实测的动力总成噪声响应进行了数值仿真,以证明所提出算法(IMLMS)的有效性。结果表明,在较宽的发动机转速范围内,收敛速度明显提高,噪声明显降低。
2 改进算法的控制器
2.1 FxLMS算法
如图1所示,通用单通道前馈ANC系统由一个带有通用FxLMS算法的自适应数字滤波器实现。这里,x(n)是参考信号(即转速表信号产生的正弦信号),d(n)是主要噪声(即动力总成噪声),e(n)是主要噪声和次要抵消噪声叠加后的误差信号。FxLMS算法使用参考信号x(n)自适应地生成二次噪声,二次噪声由误差信号e(n)调整。参考信号x(n)基于发动机转速进行内部合成,发动机转速可根据转速表脉冲序列信号进行估计。这可以表示为:

其中,n是时间指数,i是发动机顺序指数,fi=iv/60是第i阶的频率,v是发动机转速,单位为rpm(每分钟转数),Fs是采样率。在使用FxLMS算法的传统系统中,x(n)需要通过二次路径模型进行滤波,该模型将控制扬声器输入信号的动态行为与误差传声器相关联,以补偿实际二次路径S(z)产生的相位延迟和幅度响应。在激活ANC系统之前,通常使用离线系统识别方法来估计此二次路径模型。FxLMS算法可概括为:
其中n是时间指数,S是次路径的脉冲响应,*表示自适应滤波器输出与次路径的线性卷积,并且控制器的滤波器权重和参考信号向量为

在式(4)中,µ是收敛步长,它决定了FxLMS算法的收敛速度和稳定性,L是自适应滤波器的阶数。收敛速度由滤波参考信号向量自相关矩阵的特征值扩展决定。正如所注意到的,动力系统噪声频谱通常由谐波控制,谐波分布在不同发动机转速的大频率范围内。此外,次级路径的频率响应是变化的。因此,由于频率相关的收敛行为,将标准FxLMS算法应用于动力总成ANC可能存在固有的性能限制。在下一节中,将回顾和讨论几种改进的FxLMS算法,以提高控制性能。

图1 使用FxLMS的动力总成ANC系统控制图
2.2 EE-FxLMS算法
Thomas等人提出了一种特征值均衡FxLMS(EE FxLMS)算法,该算法通过在保持相位不变的情况下展平二次路径模型的幅度响应来工作。通过FFT和归一化估计的二次路径模型中每个频率单元的幅度,可以简单地实现幅度均衡。然后,Sun等人将该算法应用于车辆动力总成噪声控制,控制图如图2所示。Duan等人扩展了类似的想法,以平衡不同控制通道之间的幅度差异。
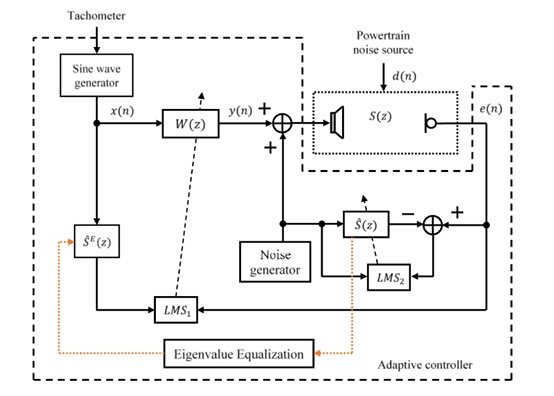
图2 使用EE-FxLMS的动力总成ANC系统控制图
2.3 NX-LMS算法
为了进一步处理谐波响应修正FxLMS算法的频率依赖收敛性,Oliveira提出了一种NX-LMS算法,通过在参考信号路径中添加单个谐波频率的归一化滤波器。图3显示了采用NX-LMS算法的ANC系统对车辆动力传动系统噪声的检测。在参考信号发生器之后添加归一化滤波器N(ω)=1/Ŝ(ω),以调谐每个正弦信号的幅度;因此,不仅在每个谐波参考处的振幅变化被均衡,而且相位延迟对收敛性能的影响被最小化。作者还将NX-LMS算法与有源噪声均衡器方案相结合,将该算法扩展到车辆动力总成噪声的有源音质控制系统中。
2.4 IMLMS算法
另一项最近的研究进一步消除动力传动系统噪声控制滤波-x型算法的频率依赖收敛性,即逆模型LMS(IMLMS)算法,如图4所示。IMLMS算法的理想是通过在控制滤波器的输出端添加二次路径的逆模型来同时补偿相位延迟和幅度。通常,在宽带频率范围内很难找到非最小相位系统的逆模型。然而,谐波响应存在逆模型;图4所示的系数A和B用于表示单个频率下的反向响应。这里,仅应用LMS算法来更新控制滤波器参数。因此,在每个谐波频率下的性能更为最优,因为在保持所有频率分量的参考信号功率相同时,收敛速度是最优的。此外,由于在参考信号路径中没有卷积操作,因此计算成本降低。然后将IMLMS算法的滤波器权值更新方程归纳为
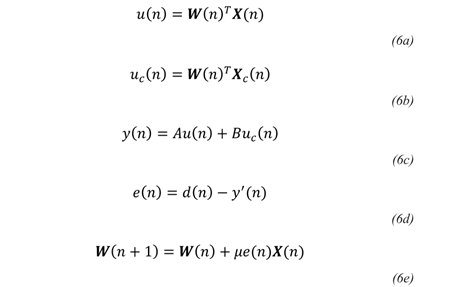
其中y′(n)是二次抵消波,常数A和B与谐波频率下逆二次路径模型的项Re和Im有关。需要注意的是,IMLMS算法的收敛速度仅取决于正弦参考信号的功率,因此对于各种谐波都能产生平衡的控制性能。图4中IMLMS算法的实现是使用两个具有一定长度(大于2)的自适应滤波器来构造正弦和余弦项的组合。该算法的一个有效实现也可并入自适应陷波滤波器,其中参考向量的正交特性将保证在单个谐波上的均衡收敛特性。此外,逆模型的实现可以放在自适应滤波器的前面或后面。
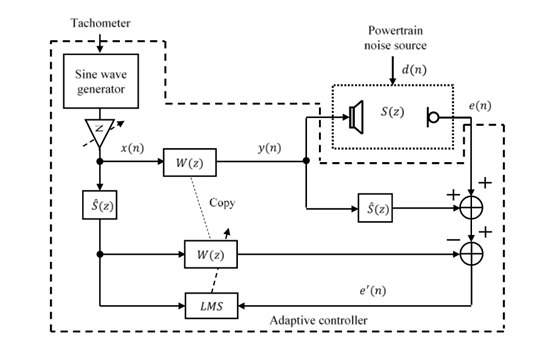
图3 使用NX-LMS的动力总成ANC系统控制图
3 数值模拟
本节将在数值环境中研究采用改进算法的单输入单输出(SISO)动力传动系统控制系统。为了便于演示,比较了FxLMS、EE-FxLMS和IMLMS算法的性能。在这些模拟中,使用V6发动机的道路车辆在不同转速下记录主要动力总成扰动和转速表信号。本研究考虑了两种情况:一种是发动机在3500 rpm左右旋转,另一种是在10秒内从1000 rpm到5000 rpm的速度扫描。利用发动机曲轴的基本转速合成余弦波参考信号。ANC系统旨在尽可能衰减驾驶员和乘客头部位置周围的主要发动机顺序噪音。这里是引擎订单1.5,2. 0, 2. 5和3.0用于分析。监控错误麦克风位于驾驶室天花板上方的头部。采用离线系统辨识方法,通过实验测量了从扬声器到误差传声器的二次路径的估计传递函数。本仿真中使用的二次路径模型的频率响应函数如图5所示。二次路径模型表示为256阶有限脉冲响应(FIR)滤波器。通过对估计的脉冲响应函数进行傅里叶变换,可以确定相应频率的逆模型常数A和B。数据采集的采样频率为4096 Hz。
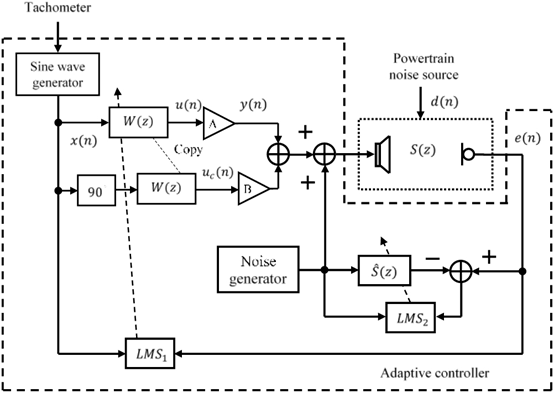
图4 使用IMLMS的动力总成ANC系统控制图
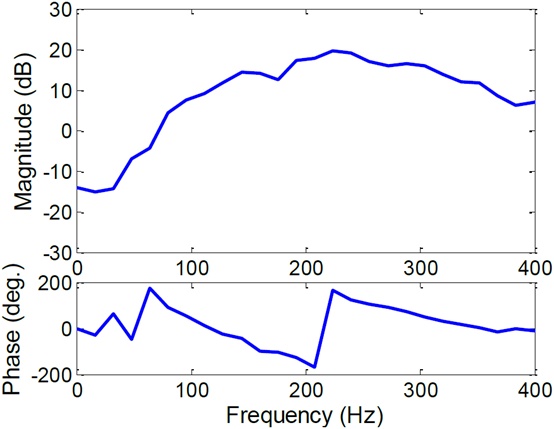
图5 从控制扬声器到误差麦克风的次级路径的频率响应函数
图6显示了使用各种自适应算法的控制系统在情况1(3500 rpm的静止转速)下的性能比较。此处仅显示了2级和3级发动机的频谱结果,以便于说明。应注意,不同发动机阶数下参考信号的振幅设置为统一。从图6(a)和(b)中可以看出,传统的FxLMS算法在第二阶和第三阶显示出不平衡的控制性能,同时它可以在每个阶产生与IMLMS算法相似的降噪效果。这是因为滤波后的参考信号功率在对应于2阶的频率处非常低,这需要较大的步长以具有快速收敛性,同时显著降低噪声。相比之下,新开发的IMLMS算法在这两个频率下表现出更平衡的性能,因为次级路径动态不会影响算法的收敛性。如图7所示(包含图6最后一秒钟的时域控制结果的频谱),IMLMS算法在第二和第三阶时分别降低了约20和25 dBA,在FxLMS算法中,可以采用基于各个频率的二次路径响应幅度的参考信号幅度调整,以平衡阶数2和3的步长差异。然而,这种修改在实践中相当麻烦。

图6 使用FxLMS、EE-FxLMS和IMLMS算法对3500 rpm下发动机转速的受控动力系统响应进行比较:(a)第二级发动机和(b)第三级发动机。
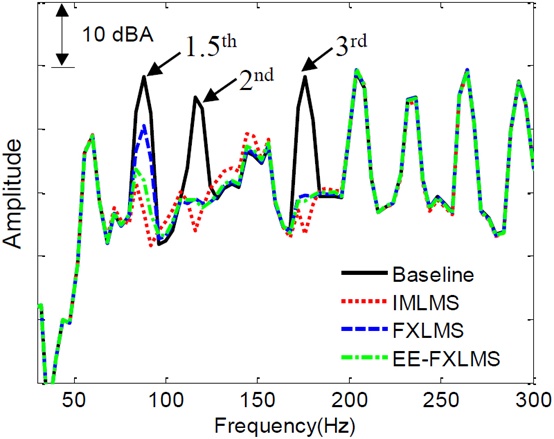
图7 3500 rpm发动机转速下受控动力系统响应的频谱比较(通过图6中最后1s数据的FFT计算的频谱)
在案例2中,考虑了发动机转速从1000转/分到5000转/分时的瞬态动力传动系统噪声。使用各种算法的控制结果如图8所示。黑线表示无任何控制的基线响应,蓝色虚线表示FxLMS算法的结果,绿色虚线表示EE FxLMS算法,红色虚线表示IMLMS算法。类似地,传统的FxLMS算法在发动机阶数为2时性能较差,在较低转速时甚至存在严重的超调。这是因为频率相关的收敛行为要求在每个速度范围内有不同的步长,以保持系统的稳定性。另一方面,EE-FxLMS算法稍微改善/减轻了单个频率的收敛失配,但在不使两种算法无效的情况下,两种算法都可以在两个引擎阶数下产生一致的噪声降低。此外,在较低频率下避免了过冲问题。总的来说,与传统的FxLMS算法相比,改进后的算法可以产生相对更多的减少。需要指出的是,当采用自适应陷波滤波器时,通过仔细的系统设计,分别调整每个频率的收敛步长,可以避免FxLMS算法性能的恶化。此外,每个谐波的参考信号功率可以通过参考文献中所述的滤波二次路径模型的功率进行手动调谐。这里的仿真研究证明了这些改进算法的显著特点。这将是我们未来的研究,以进一步调查和比较它们在真实车辆上的有效性。
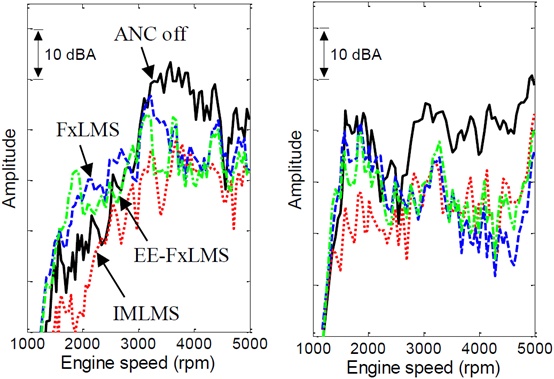
图8 发动机转速在10秒内从1000转/分扫至5000转/分时,情况2受控动力系统响应的频谱比较
4 总结
采用ANC技术解决低频噪声问题在许多噪声控制工程实践中,特别是在汽车行业中,具有很大的应用前景。这是因为ANC在低频范围内非常有效,而传统的PNC方法往往与其他设计要求(如燃油效率)发生冲突。在这种情况下,ANC已被视为车辆NVH改进的战略解决方案,正如大型汽车公司发布的具有ANC功能的多个批量生产车型所注意到的那样。为了进一步了解当前动力总成ANC系统的功能,本文讨论了几种最新的高效自适应控制算法。这些传统FxLMS算法的改进版本是专门开发的,用于减少和/或消除单个发动机阶次下频率相关的收敛行为(特别是由次级路径模型引起的)。通过在自适应滤波器的输出处展平二次路径的逆模型的幅值或补偿相位响应,可在宽发动机转速范围内均衡收敛,这样,动力总成控制系统可以更好地跟踪在不同工作条件下,随着发动机转速变化而显著变化的车内噪声特征的波动。这些最新的研究成果也为发动机响应的主动声音设计提供了一个有希望的解决方案。
文章来源:Sun, G., Feng, T., Xu, J., Li, M. et al.,"Modified FxLMS Algorithm with Equalized Convergence Speed for ActiveControl of Powertrain Noise," SAE Int. J. Passeng. Cars - Mech. Syst.8(3):2015, doi:10.4271/2015-01-2217.
AutoAero是吉林大学张英朝教授团队建立的专业汽车空气动力学微信公众号号,致力于普及汽车空气动力学知识,传播汽车空气动力学。推广包括流体力学基本理论,汽车空气动力学及热管理水管理等基础知识,乘用车气动造型设计,卡车气动造型设计,风洞实验技术等多方面的内容。欢迎有兴趣的专业人士阅读、关注、共享!
来源:AutoAero













