随着智能网联汽车技术的发展和智慧交通体系的构建,车路云一体化系统成为提升交通效率、改善交通安全和降低能耗的重要技术路径。其中,车群智能调度技术和网联监控技术作为车路云协同的关键技术模块,对实现多车辆协同优化、动态路径规划和交通异常监控具有重要意义。
车群智能调度技术旨在通过车端、路端和云端的深度协同,实现多车辆的高效协作,优化交通资源分配,其典型应用场景包括多车编队、多车协同避障等。通过融合V2X通信、大数据分析和人工智能技术,车群智能调度技术能够显著提升交通流的稳定性和车辆运行效率,有助于减少拥堵和碳排放。
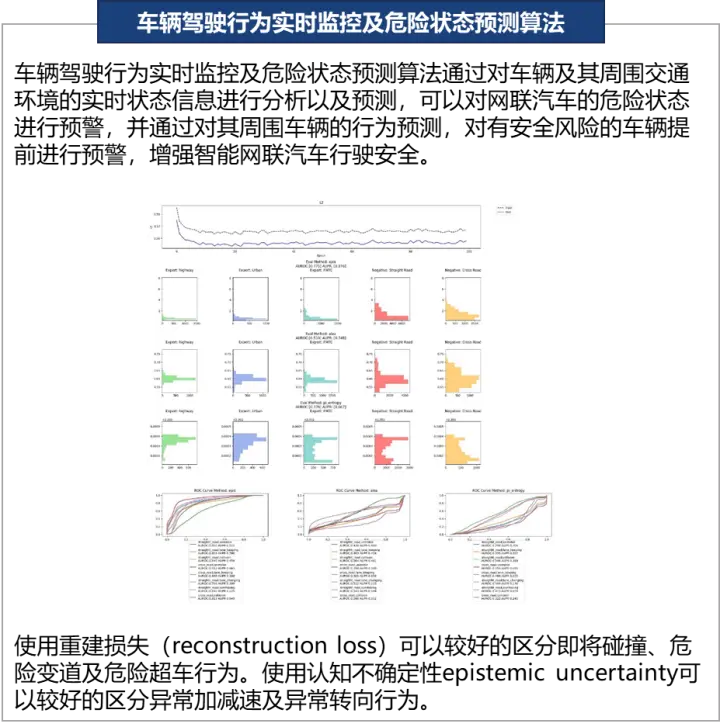
网联监控技术是保障车路云一体化系统稳定运行的基础手段。该技术通过车端传感器、路端监控设备和云端数据中心的联动,可以实时感知交通环境、监控车辆状态,并对异常行为或潜在风险进行快速响应。网联监控技术不仅有助于提高针对突发事件的应急处理能力,还可以为交通管理部门提供数据支撑,助力智慧交通体系的全局优化。
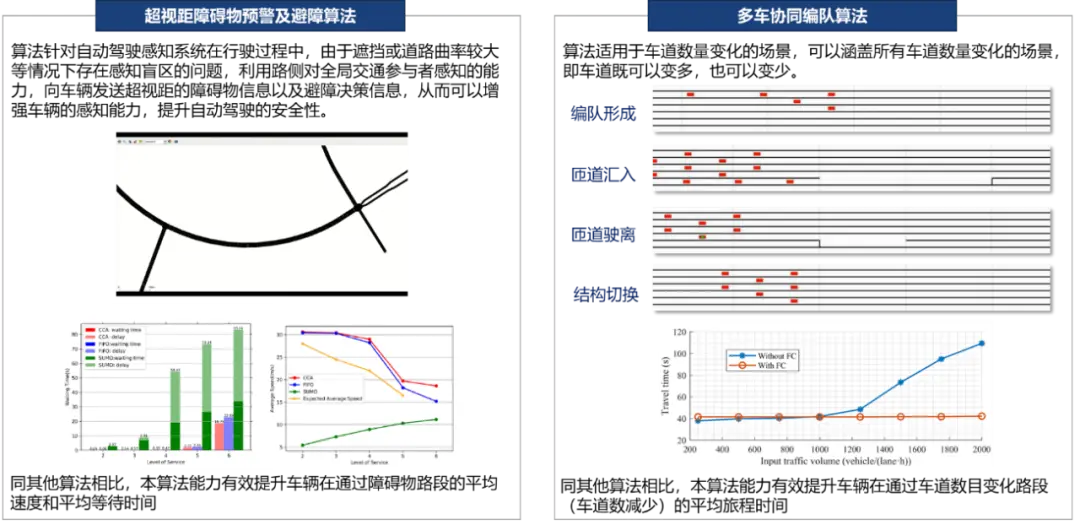
依托多场景自动驾驶云协同控制技术课题研究,研发了一套面向智能网联汽车的协同控制与网联监管算法。基于云控基础平台汇聚的全量交通参与者信息以及环境信息,一方面可以对道路中的异常交通事件进行识别,为车辆提供超视距的感知信息以及决策建议。另一方面可以通过云端对道路中具有相同路径的车辆进行临时编队,并可以针对道路施工或者道路本身车道数量变少等易造成交通拥堵的场景,通过动态车辆编队算法,保障辆能够安全高效通过交通瓶颈路段,提升交通效率。此外,基于云控基础平台汇聚的车辆轨迹信息,能够对异常的车辆驾驶行为进行监控和预警,有效降低交通事故发生的可能性。基于上述研究成果,形成了《自动驾驶车群智能调度技术报告》和《自动驾驶车辆网联实时监控技术报告》两项技术研究报告。
《自动驾驶车群智能调度技术报告》面向车路云一体化协同决策控制场景,分别针对单车及编队研究在交通瓶颈路段的协同控制。报告从项目背景,国内外研究现状,多车协同编队算法设计、超视距障碍物预警及避障算法设计,仿真验证,测试用例集设计,数据标准化需求及建议等方面展开,验证了在云控系统环境下,通过对道路中各类异常事件的感知以及对交通参与者状态信息的感知,云端可以获得对全局交通的全量高精度感知,基于云端的分场景协同决策控制模型,可以对车辆的驾驶行为进行优化,提升自动驾驶的安全性及行驶效率。
《自动驾驶车辆网联实时监控技术报告》聚焦于基于轨迹数据的异常车辆行驶的识别与预警。通过对车辆异常驾驶行为分类、数据集采集与构建、异常驾驶行为样本集构建,建立异常驾驶行为识别模型,并基于异常驾驶行为识别结果实现车辆预警算法,为车辆提供建议车速以及建议行驶车道,确保车辆行驶的安全。
来源:CICV创新中心













