纵向加速度传感器的输出信号并不能直接用于纵向车速估计,需要一个加速度校正模块来弥补车身俯仰角以及路面坡度角对加速度计产生的偏差影响。当车辆处于加速或减速过程中,车身会由于悬架存在的弹性导致产生一个车身俯仰角(Pitch Angle),而重力加速度会通过此俯仰角对纵向加速度信号产生影响,导致其出现一定的信号偏差;同样,路面坡度角(Slope Angle)也会帮助重力加速度去改变纵向加速度信号。重要的是当纵向加速度信号出现偏差时,直接积分法(Direct Integration)会使得这个偏差所得到的累计误差趋向无穷,这是极度危险的。
本文采用简单有效的加速度计补偿算法,这个算法不需要增加传感器,利用简单的方法得到俯仰角和路面坡度对加速度信号的影响值,并将其补偿到纵向加速度信号中去,增强估计算法对车身姿态和路面角度的自适应性。
当车辆在坡道上进行行驶时,几何学构造如下图所示,其中,α是路面坡度角、θ是车身俯仰角、g是重力加速度、axm是纵向加速度传感器所测得的纵向加速度、ax是实际纵向加速度。
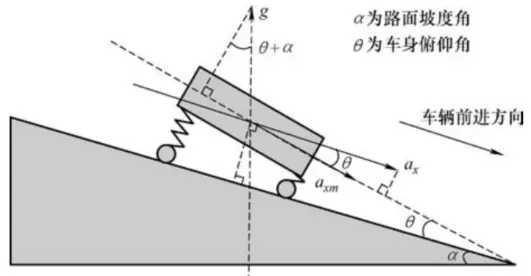
图1 车辆在坡道上的几何学结构示意图
显然,当纵向加速度受车身俯仰角和路面坡度角双重影响时,处于车身平面质心处的纵向加速度计的输出值会变为
 (1)
(1)
假设坡道角和车身俯仰角都很小,即θ≤5°,α≤5°。此时,
 (2)
(2)
上式中有2个未知量,即车身俯仰角θ和路面坡度角α。
(1)计算车身俯仰角
在直线急加速或急减速的情况下,在车辆的前后轮支撑点处列出力矩平衡方程。
其中,m为车辆质量;Lf为车辆质心到前轴的距离;Lr为车辆质心到后轴的距离;L为轴距;h为质心离地高度;Fzf为前轮法向力;Fzr为后轮法向力。
考虑到载荷转移,则有
式中,Fzfb和Fzrb是指力平衡的状态下前后轮的法向力;ΔFzf和ΔFzr为载荷转移造成的前后轮法向力变化量。
假设前悬架刚度为Kf,后悬架刚度为Kr,利用胡克定理可以得到
式中,ΔXzf和ΔXzr为载荷转移造成的前后轮悬架位移量。
由于θ≤5°,则tanθ≈θ,通过前后轮悬架位移的几何关系可以得到

因此,通过一些车辆参数即可得到实际纵向加速度值与车身俯仰角之间的关系。
(2)计算路面坡度角
当车辆加速度很小时,车身俯仰角几乎为零,可以忽略不计。并且由于此时主要利用轮边速度来估计车速,因此实际车辆加速度可以由纵向估计车速和卡尔曼滤波进行估计,则模型(1)可简化为
式中,axest为由参考车速估计的纵向加速度,可认为是实际的纵向加速度。axm是传感器直接测量的纵向加速度。1/(τs+1)表示为低通滤波器。假设车辆在进入紧急工况至恢复正常行驶期间路面坡度角是不变的,即∂α/∂t=0,那么当k时刻车辆进入紧急状态(紧急制动或加速),即将要产生较大的车身俯仰角时,将受路面坡度角影响的部分提取出并锁定,然后将其差值补偿到纵向加速度信号校正模块,直至车辆解除紧急状态为止。因此可得坡度角为

式中,αfix为紧急工况时不变的路面坡度角;d为一个延迟时间,这也就意味锁定的值为k时刻之前的一个差值,而不是在进入紧急工况的k时刻处。
根据(2)即可得到在紧急工况下,传感器测得的纵向加速度值与实际纵向加速度值之间的关系为:
即修正后可得实际的纵向加速度值为
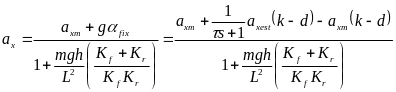 (3)
(3)
其中,纵向加速度信号在一定程度上可以间接体现出滑移率的大小,当然,从本质上讲加速度信号并不能完全代表滑移率,但除了某些非常极限的工况下,加速度的大小确实能够从一定层面上反映出轮胎的工况是否剧烈,滑移率是否超出一定范围。因此,选择2m/s2作为“紧急工况”的切换点。
本文所建立的纵向加速度校正流程如下图所示。从图中可以看出,纵向加速度校正其实分为路面坡度角补偿和车身俯仰角校正两个部分。车身俯仰角校正部分一直存在,而路面坡度角补偿部分则会在紧急工况下介入并补偿坡度角所带来的加速度偏差值。
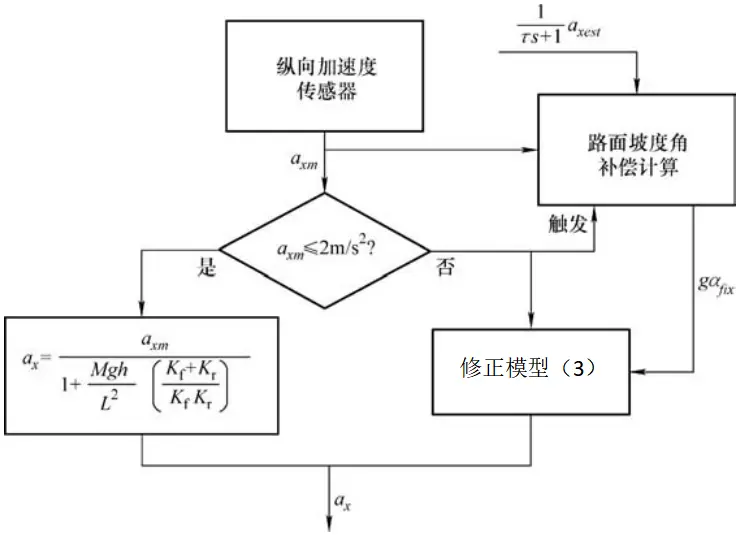
图2 纵向加速度补偿和校正部分流程图
来源:智能运载装备研究所













