摘要
以半主动悬架系统为研究对象,针对路面的变化产生的震动与冲击对半主动悬架的影响,为了改善汽车平顺性,文章采用Simulink仿真,设计了不同数量的隶属度函数的模糊PID控制、PID控制系统以及对比了其与被动悬架系统的性能,得出模糊PID控制器相比于PID控制器与被动悬架,具有更好的控制效果,以及7隶属度函数相比于3隶属度函数使模糊PID控制器的控制效果更加稳定,能够改善车辆悬架的性能以及改善了汽车平顺性。
引言
汽车在不平的路面上行驶,路面上会有垂直方向上的力,对乘客和驾驶员或者货物造成一些损害。而在这个过程中,悬架承担着至关重要的作用,它可以减少不平的路面对于车辆的冲击和减弱车身震动。悬架系统的未来是刚度、阻尼可调和控制策略优秀的控制系统。国内外传统的被动悬架弹簧刚度不可变,减振器的阻尼也不变,而半主动悬架在被动悬架的基础上加上了有效的控制策略,能够对汽车在不平路面行驶时起到很好的减振,可以减弱人类身体受到的各种不平的地面冲击伤害。当前我们使用的传统PID(比例–积分–微分,Proportion-Integration-Differentiation)控制策略能很好地消除稳态误差,而它的缺点是只能用于线性定常系统。而模糊控制能够对汽车半主动悬架的很多非线性参数的问题做出解决,它对各种的过程内部参数的各种改变不是很敏感,并且通用性强,而缺点就是有一定的稳态误差。基于此,王大勇等人提出一种变论域模糊PID控制方法,以解决模糊PID存在的因模糊规则制定盲目性而产生的在线调节时间过长的问题。Prashant N等人用MATLAB-Simulink软件中的PID控制器对磁流变阻尼器进行了数值仿真,麦弗逊悬架和半主动悬架系统在改变磁场作用下的粘度特性来改变阻尼力,对比了半主动悬架控制阻尼器的比例积分微分(PID)控制器和麦弗逊常规悬架的汽车底盘位移和加速度。当前在模糊控制中为方便计算,通常使用3隶属度函数,而这会导致论域中的隶属度函数的密度变小,使模糊控制系统的分辨率偏小,因此会导致系统响应不太敏感,并且可能无法及时提供输出跟随小的输入变化的控制,导致系统输出发生震荡。因此本文需要增加隶属度函数,通常取奇数个,这样可以达到对称与平衡的目的。
模型建立
2.1. 半主动悬架模型建立
由于汽车的振动模型建立比较繁杂,因此为了方便分析将其简化,取1/4车辆二自由度的车辆悬架模型,将轮胎看成线性弹簧,如图1所示。
对上述悬架进行力学分析可知悬架系统的力学表达式为:
M1x¨1=C2(x˙2−x˙1)+K2(x2−x1)−K1(x1−x0)−FkM1x¨1=C2(x˙2−x˙1)+K2(x2−x1)−K1(x1−x0)−Fk(1)
M2x¨2=Fk−C2(x˙2−x˙1)−K2(x2−x1)M2x¨2=Fk−C2(x˙2−x˙1)−K2(x2−x1)(2)
式中M1:簧下质量;M2:车身质量;X1:簧下质量垂直位移;X2:簧上质量垂直位移;K1:轮胎刚度;K2:悬架刚度;C2:悬架的阻尼系数;Fk:外力输入;X0:路面位移;x¨1x¨1 表示簧下质量的质心加速度,x¨2x¨2 表示簧上质量的质心加速度。
本文的研究对象是某种C级车的1/4悬架,它的基本数据如表1所示。
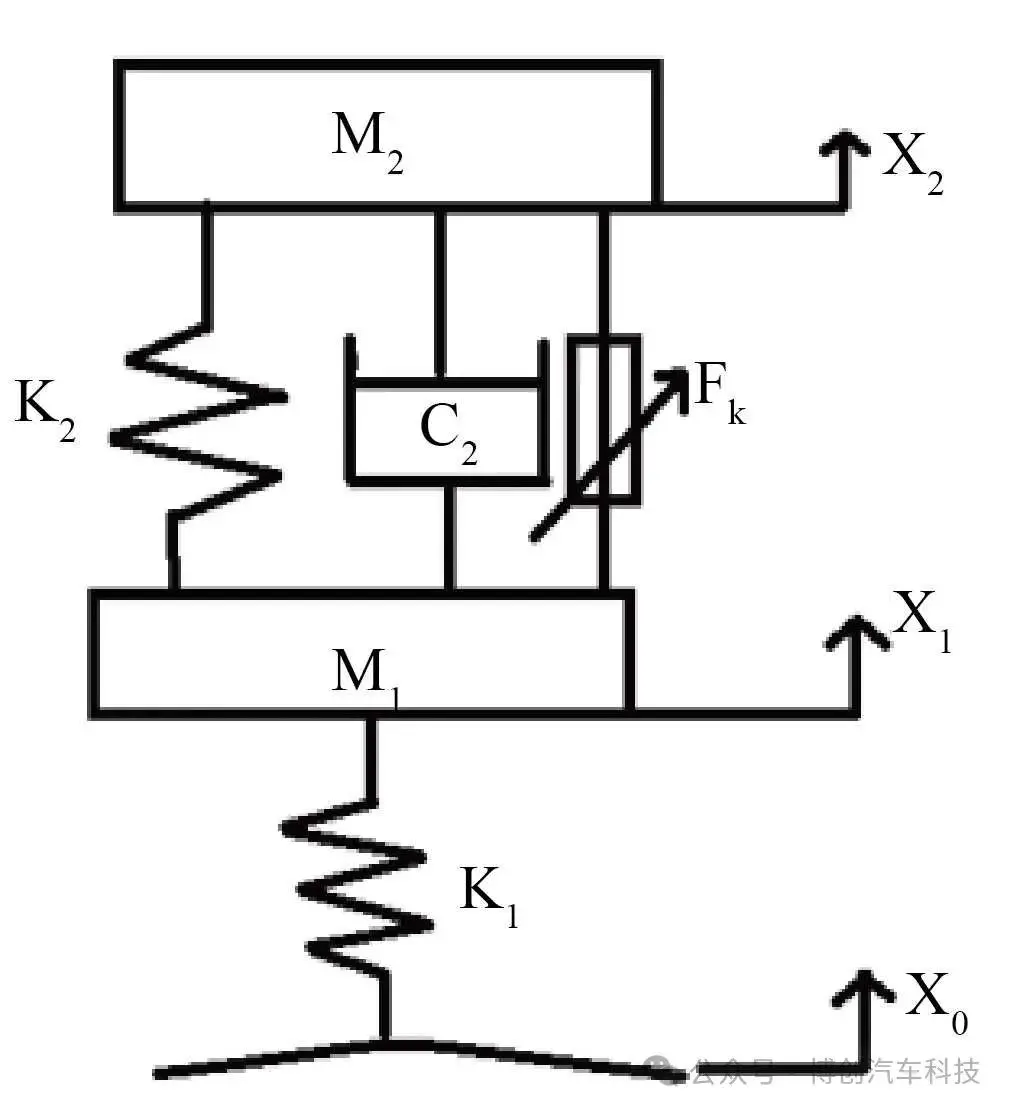
Figure 1. Vehicle suspension model
图1. 车辆悬架模型
Table 1. Part of the structural parameters of the suspension
表1. 悬架的部分结构参数
|
名称 |
符号 |
数值 |
|
簧上质量/kg |
M2 |
500 |
|
簧下质量/kg |
M1 |
40 |
|
悬架阻尼系数/(N*s/m) |
C2 |
1500 |
|
悬架弹簧刚度/(N/m) |
K2 |
16000 |
|
轮胎刚度 /(N/m) |
K1 |
240000 |
2.2. 路面模型的建立
本文建立一种滤波白噪声路面模型,可以引入因子f0f0 ,取f0=0.0628 hzf0=0.0628 hz ,其公式如下:
q˙=2πn0Gq(n0)v−−−−−−−√w(t)−2πf0qq˙=2πn0Gq(n0)vw(t)−2πf0q(3)
式中q为路面位移(m);n0=0.1 m−1n0=0.1 m−1 ,n0n0 为参考的空间频率;Gq(n0)Gq(n0) 为路面不平度系数,在参考空间频率下得功率谱密度值(m3);v为车辆速度;w(t)为单位白噪声;f0为下限截止频率[8]。
当路面为B级,该车车速为30 m/s时,由路面不平度分类的标准可以得出Gq(n0)=6.4×10−6m2/m−1Gq(n0)=6.4×10−6m2/m−1 因此本文使用Simulink来建立路面模型,路面谱仿真模型如图2,路面谱仿真结果如图3。
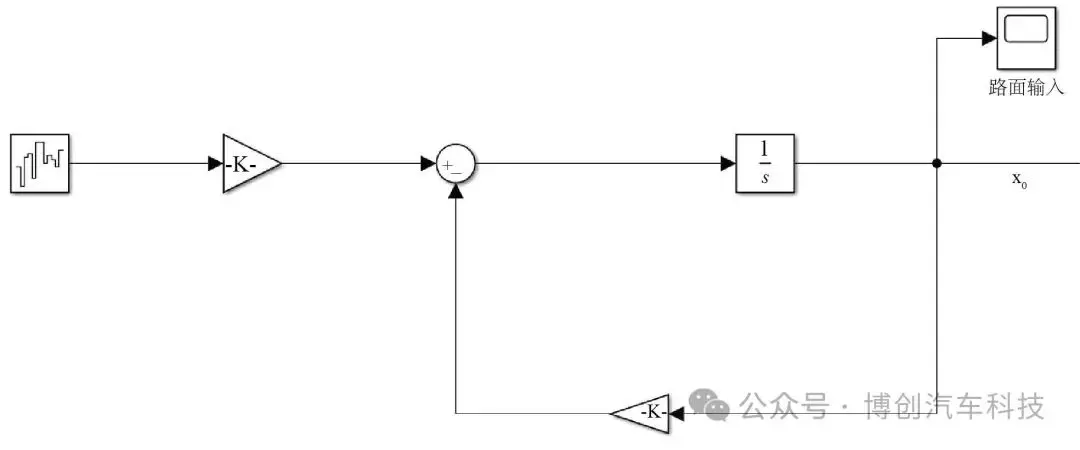
Figure 2. Pavement spectrum simulation model
图2. 路面谱仿真模型
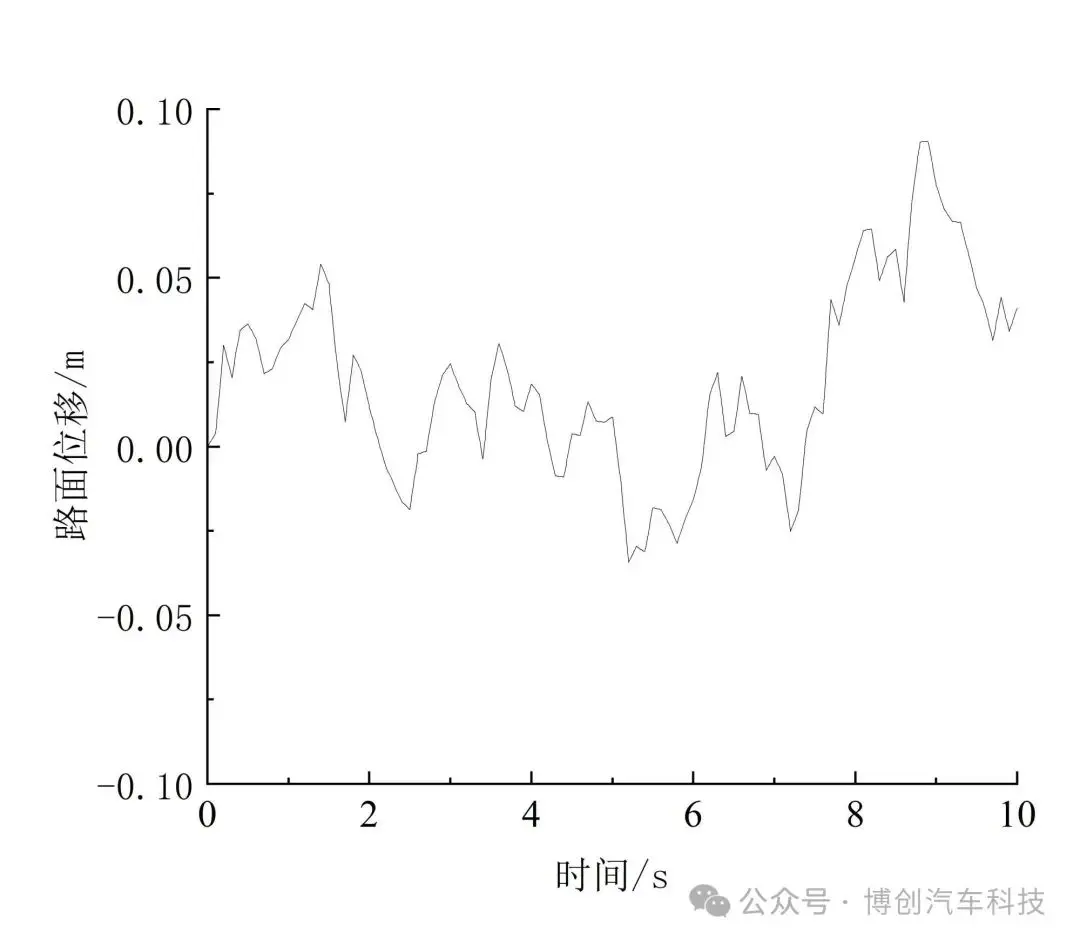
Figure 3. Pavement spectrum simulation results
图3. 路面谱仿真结果
如图3所示,路面谱变化平稳且幅值小,可以很好地反映出路面的变化情况,为半主动悬架仿真结果提供有力佐证。
半主动悬架控制器设计
3.1. 基于PID的控制器设计
PID的控制策略可以描述为下式:
u(t)=kp[e(t)+1T1∫e(t)dt+TDde(t)dt]u(t)=kp[e(t)+1T1∫e(t)dt+TDde(t)dt](4)
式中:u(t)为控制器的输出信号;e(t)为偏差;kp为比例系数;ki为积分系数;kd为微分系数;T1为积分时间常数,T1 = kp/ki;TD为微分时间常数,TD = kd/kp。
3.2. 基于模糊PID的控制器设计
模糊PID控制是将模糊算法和PID控制算法有机结合,本质就是以车身垂直加速度与理想值的偏差与偏差变化率作为模糊控制中的输入,以PID控制器的比例、积分、微分系数变化量作为输出,也就是用模糊算法规则来优化PID的控制参数kp、ki,kd [9]。模糊PID控制策略可以使模糊控制很好的动态跟踪性和PID的稳定性相结合,原理图如图4所示。
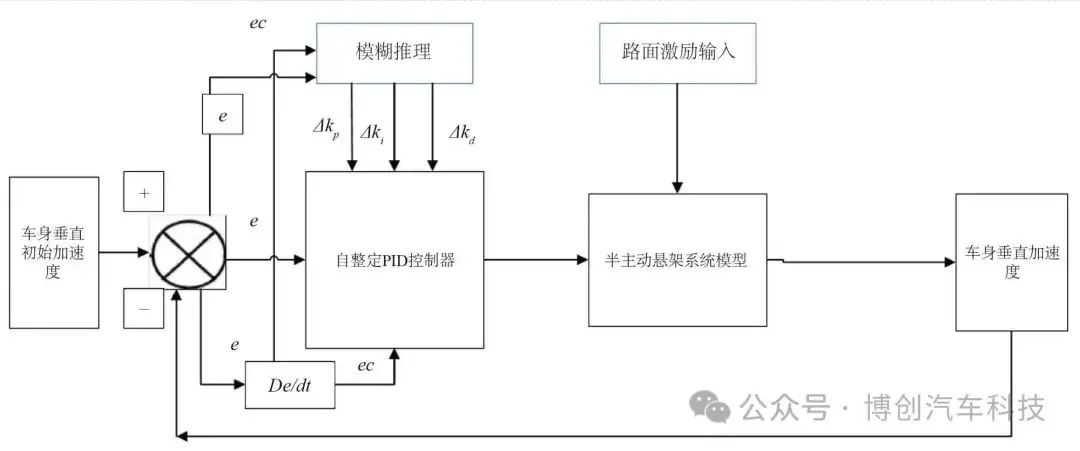
Figure 4. Schematic diagram of the fuzzy PID controller
图4. 模糊PID控制器原理图
如此最终的PID数值:
kp1=kp+Δkp; ki1=ki+Δki; kd1=kd+Δkdkp1=kp+Δkp; ki1=ki+Δki; kd1=kd+Δkd(5)
式中:kp,ki,kd是PID刚开始根据经验设定的值,kp = 10;ki = 1000;kd = 0;Δkp,Δki,Δkd为模糊修正量;kp1,ki1,kd1为模糊PID的最终设定值。因此可以搭建模型,如图5所示。
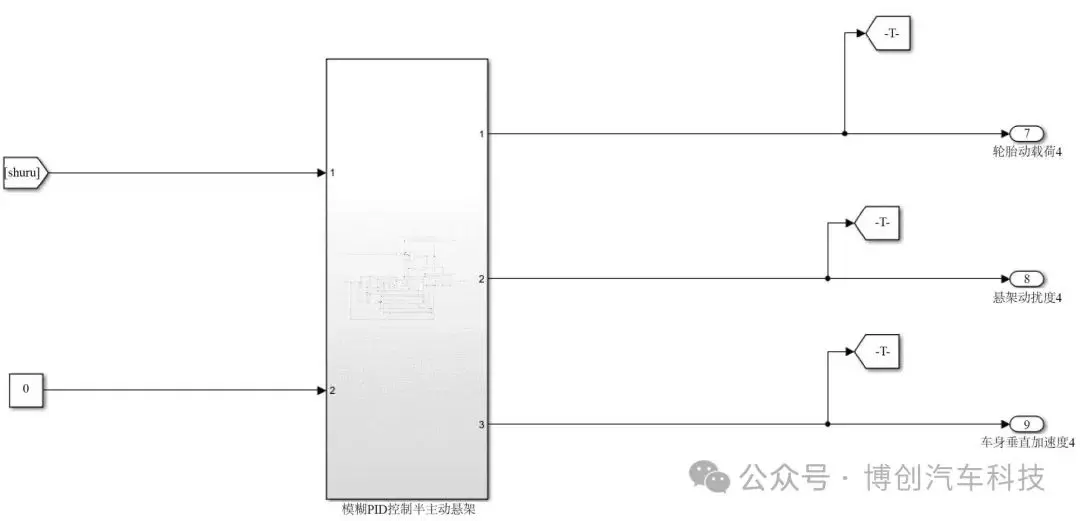
Figure 5. Blurred PID-controlled semi-active suspension model
图5. 模糊PID控制的半主动悬架模型
3.2.1. 确定隶属度函数
公隶属度函数的确定方法都带有一部分主观因素,但是它实际上反映的是事物的渐变性,因此它有一些基本原则:
如从最大隶属度函数点出发向两边过渡时,其必须是单调递减的,也就是不能成波浪状,悬架的控制器需要灵敏度高,也为了简化计算本文选用三角形隶属度函数。
3.2.2. 确定模糊规则表与模糊子集
模糊PID控制器的输入变量车身垂直加速度与理想值的偏差e,偏差变化率ec和输出变量的模糊论域均选为[−6, 6],解模糊的方法使用重心法,考虑到偏差与偏差率有正有负,所以对模糊控制器进行设计的时候输入输出变量采用7个模糊语言变量来描述:“PB (正大)”、“PM (正中)”、“PS (正小)”、“ZO (零)”、“NS (负小)”、“NM (负中)”、“NB (负大)”。而模糊规则表的确定经验如下:如果e与ec符号一样,则表达出车身垂直加速度可能会变大,如果|e|挺大,则控制器的控制作用应该比较强,以此来对偏差来做出迅速调整,这时Δkp应该取比较大的数值。这时为了不要让超调量过大,应该Δki取比较小的和Δkd取中度的数值。当|e|不大不小时,系统的超调量应该尽量地控制,Δkp应该取比较小的,而Δki和Δkd应该取中度的数值。当|e|数值比较小的时候,系统应该具有优良的稳态特性,因此Δkp的取值应该取中度的数值,Δki的数值应该偏大,这时可以让ec的大小来决定Δkd的数值。当比较小的ec时Δkd的数值应该偏大一些,如果这时ec很大时而Δkd的数值应该小一点,如果e和ec的符号不一样则表达出其车身垂直加速度可能会减弱,此时|e|的数值如果比较大,则控制作用不用太强,此时Δkp与Δki Δkd的数值应该取中度的,如果|e|的数值是不大不小的,则可以增加一点Δkp与Δki,而Δkd的数值应该取中度的,这时如果|e|的数值偏小,则为了系统的稳定性,Δkp与Δki的数值取更大一点,Δkd的数值取适中一点的[10]。
由上述的经验可得模糊PID的模糊控制规则表,如下表2~表4所示。
Table 2. Δkp fuzzy control rule table
表2. Δkp模糊控制规则表
|
e ec |
NB |
NM |
NS |
ZO |
PS |
PM |
PB |
|
NB |
PB |
PB |
PM |
PM |
NS |
NS |
ZO |
|
NM |
PB |
PM |
PM |
PM |
NS |
NS |
ZO |
|
NS |
PM |
PM |
PS |
PS |
ZO |
PS |
PS |
|
ZO |
PM |
PS |
ZO |
ZO |
ZO |
PS |
PM |
|
PS |
PS |
PS |
ZO |
PS |
PS |
PM |
PM |
|
PM |
ZO |
NS |
NS |
PM |
PM |
PB |
PB |
|
PB |
ZO |
NS |
NS |
PM |
PB |
PB |
PB |
Table 3. Δki fuzzy control rule table
表3. Δki模糊控制规则表
|
e ec |
NB |
NM |
NS |
ZO |
PS |
PM |
PB |
|
NB |
NB |
NM |
NS |
PS |
PM |
PS |
ZO |
|
NM |
NB |
NM |
NS |
PS |
PM |
PS |
ZO |
|
NS |
NM |
NS |
ZO |
ZO |
ZO |
ZO |
NS |
|
ZO |
NM |
NS |
ZO |
ZO |
ZO |
ZO |
NS |
|
PS |
NS |
ZO |
PS |
PS |
NS |
NS |
NM |
|
PM |
NS |
ZO |
PS |
PS |
NS |
NS |
NM |
|
PB |
ZO |
ZO |
PM |
PM |
NM |
NM |
NB |
Table 4. Δkd fuzzy control rule table
表4. Δkd模糊控制规则表
|
e ec |
NB |
NM |
NS |
ZO |
PS |
PM |
PB |
|
NB |
PM |
PM |
PS |
ZO |
NS |
PS |
PM |
|
NM |
PM |
PM |
PS |
PS |
NS |
PS |
PM |
|
NS |
PS |
PS |
PM |
PS |
PS |
PM |
PB |
|
ZO |
PS |
PS |
PM |
PS |
PS |
PM |
PB |
|
PS |
ZO |
ZO |
PS |
PS |
NS |
PS |
PM |
|
PM |
ZO |
ZO |
PS |
ZO |
NS |
PS |
PM |
|
PB |
ZO |
NS |
PS |
ZO |
NM |
PS |
PS |
仿真分析
如上所述,选择B级路面车速设为30 m/s,在MATLAB/Simulink中搭建1/4半主动悬架模糊PID控制器,为比较7隶属度函数的模糊PID控制器之于半主动悬架与被动悬架和PID控制器之于半主动悬架、3隶属度函数的模糊PID控制器的控制效果,将其Simulink中的仿真结果做出对比,能表示悬架性能的三个参数,如下图6~图8所示:轮胎动载荷,悬架动行程,车身垂直加速度的仿真实验结果。
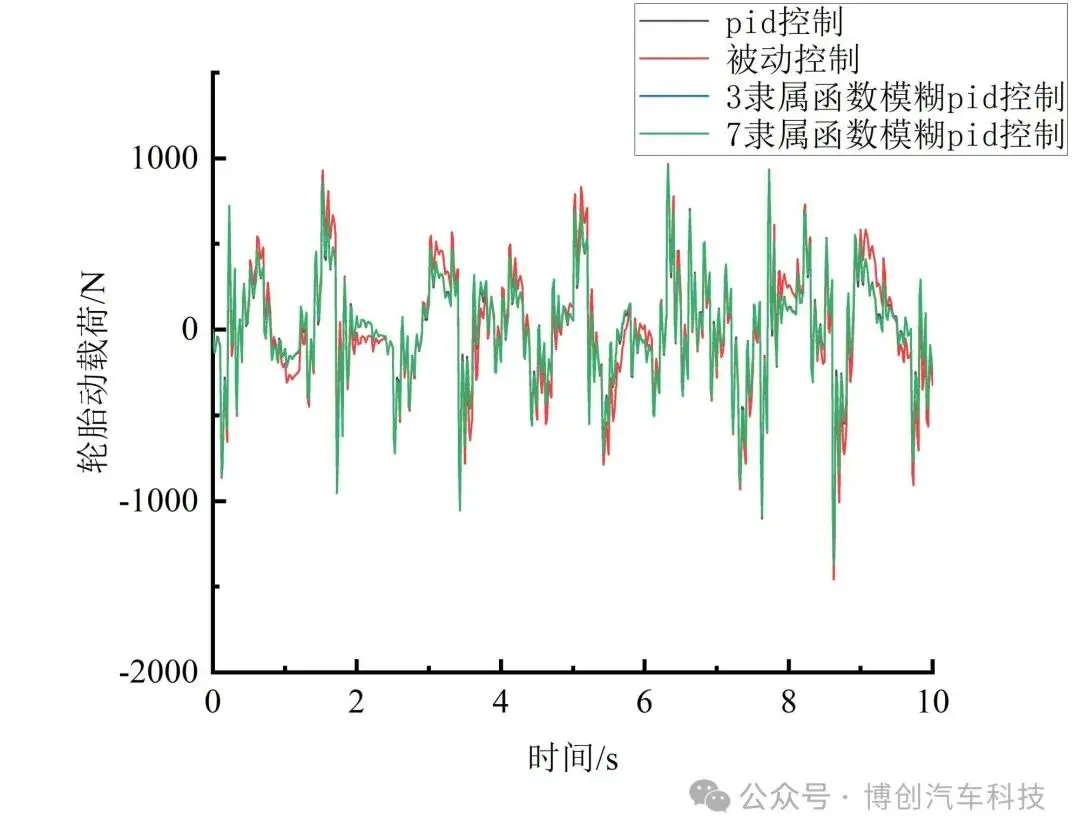
Figure 6. Tire dynamic load simulation results
图6. 轮胎动载荷仿真结果
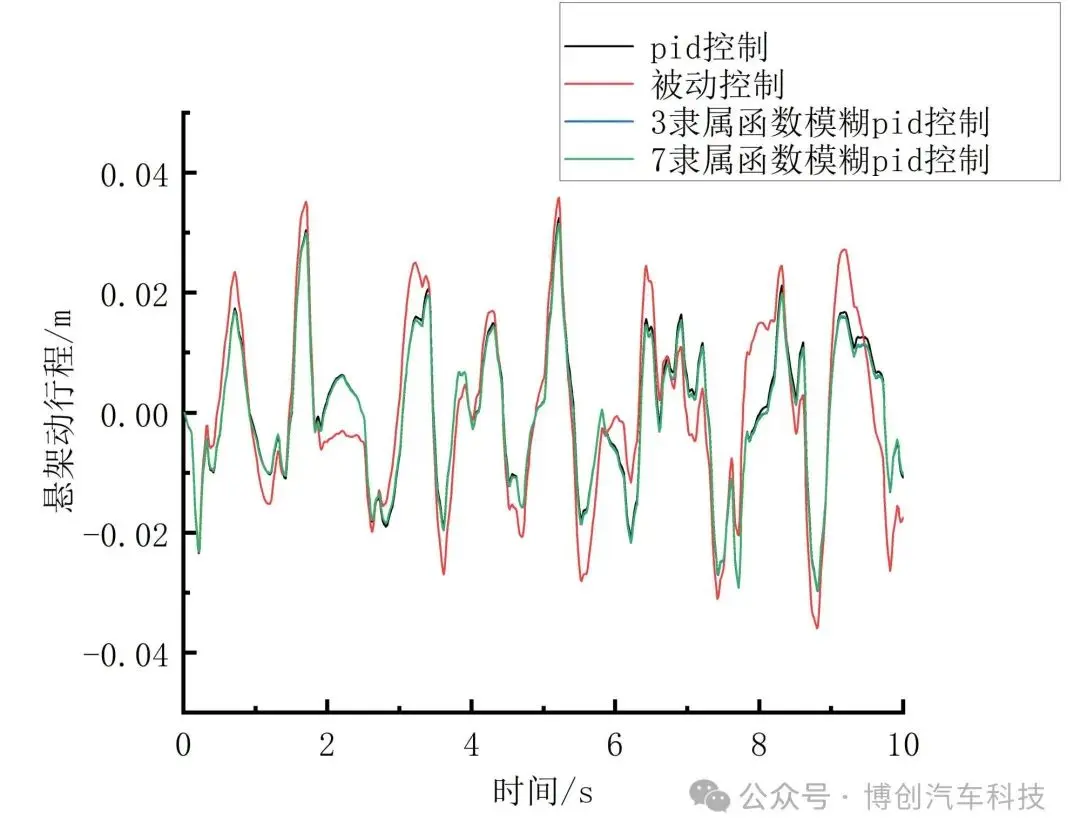
Figure 7. Simulation results of suspension dynamic stroke
图7. 悬架动行程仿真结果
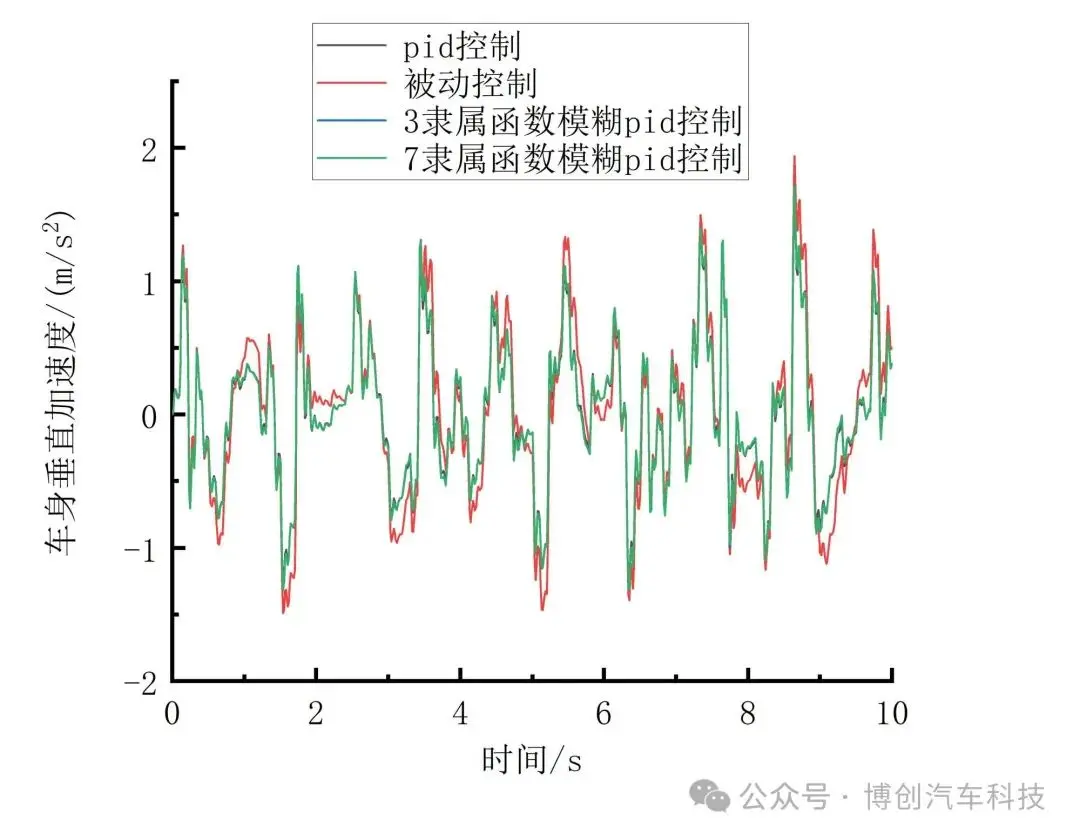
Figure 8. Simulation results of vertical acceleration of a car body
图8. 车身的垂直方向加速度仿真结果
由上图6~图8可以看出,相比于被动悬架和增加了PID控制器的半主动悬架,模糊PID控制策略的悬架使车辆在高速行驶时降低了轮胎动载荷、悬架动行程以及车身垂直加速度等三项表征悬架性能的参数而相比于3个隶属度函数模糊PID控制系统,使用7个隶属度函数模糊PID控制系统响应稳定。
5. 结语
本文利用模糊控制对PID控制参数进行了优化,设计了7个隶属度函数基于模糊PID半主动悬架控制系统,结合轮胎动载荷,悬架动行程,车身垂直加速度对半主动悬架进行了仿真分析。研究得出相比于3个隶属度函数模糊PID控制系统,使用7个隶属度函数模糊PID控制系统响应稳定,以及该模糊PID控制策略解决了传统PID参数在确定时的固有的依赖经验性,改善了传统的被动悬架与使用PID控制策略的半主动悬架车辆的乘坐不舒适和行驶平顺性不好的缺点。
来源:博创汽车科技
作者:董国龙













