驾驶员监控系统(DMS)主要基于机器视觉和人工智能技术,通过实时监测和分析驾驶员的面部特征、眼球运动、头部姿态、踏板控制等信息,来判断驾驶员的疲劳状态和注意力情况,当驾驶员出现疲劳、睡眠、分心等驾驶情况时,及时发出报警,从而确保驾驶安全。
国内外法规、标准均提出了对于DMS的技术要求和对应的测试方法,但测试方法存在一定的差异性,国外主要以真人测试为主,国内标准提出了真人、假人相配合的测试方法,小强今天就带大家系统了解和分析下DMS的标准、法规要求。
一、相关政策及标准现状
2025年2月工信部和市场监督管理总局联合发布的《关于进一步加强智能网联汽车产品准入、召回及软件在线升级管理的通知》配套指南中要求L2级驾驶自动化系统需要具备检测驾驶员脱离驾驶任务的必要技术措施。
GB/T 41797《驾驶员注意力监测系统性能要求及试验方法》,提出系统监控驾驶员注意力分散、头部姿态异常及异常驾驶行为的要求。
围绕着DMS,欧盟和联合国已经出台了一些列的法规标准和测评体系,包括:
(EU)2021/1341 DDAW驾驶员疲劳和注意力报警系统,
主要针对驾驶员疲劳预警系统,要求车辆能够监测驾驶员的疲劳状态,并在必要时发出警报。
(EU)2023/2590 ADDW先进驾驶员分心报警系统,进一步扩展了对驾驶员注意力分散的监测要求,强调系统需要能够识别多种分散注意力的行为。
UNECE R171 DCAS驾驶员控制辅助系统(L2+),关注驾驶员监控系统(DMS)的整体性能,包括对驾驶员脱手、脱眼、疲劳、注意力分散等状态的监测能力。
R171.01版本将允许NOA在高速公路场景下运行时,驾驶员脱手不脱眼。当驾驶员视觉脱离时,应及时给予脱眼报警EOR。
|
车速[km/h]
|
最晚EOR时间[s]
|
|
130
|
3.5
|
|
10~60
|
5.0
|
UNECE R157 ALKS自动车道保持系统(L3),针对自动驾驶车辆的特定场景,要求系统能够有效监控驾驶员状态,确保在自动驾驶模式下驾驶员能够随时接管车辆。
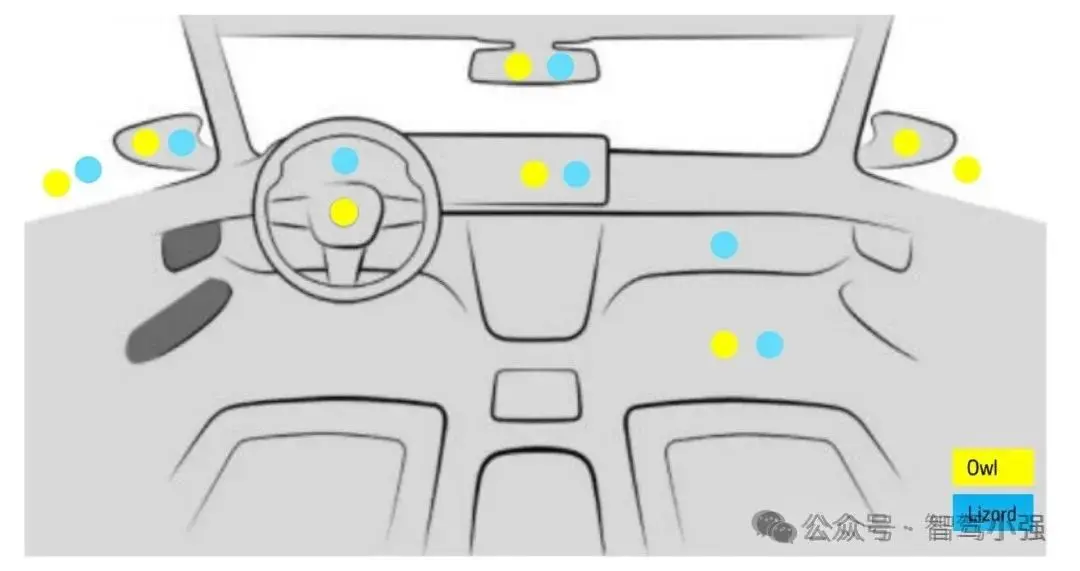
Euro-NCAP2023的安全辅助Safety Assist模块满分为18分,其中驾驶员状态监控DSM(Driver State Monitoring)满分为2分。DSM的2分中,驾驶员分心监测为0.9分,驾驶员疲劳监测为0.9分,无响应的驾驶员为0.2分。
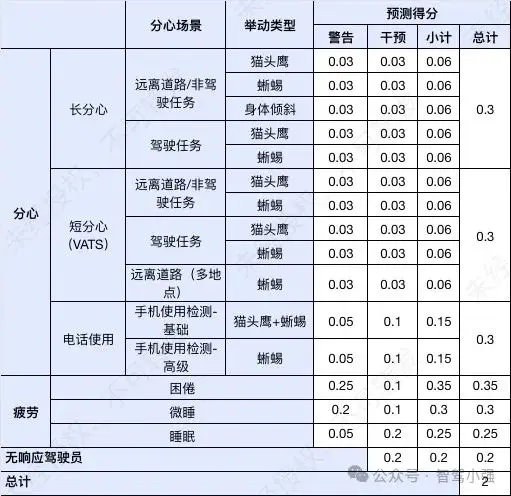
Euro-NCAP2026的安全行车总共100分,DMS有30分的分值,测试内容和ENCAP2023一致,进一步提出了明确的鲁棒性要求。
类别噪声变量范围/元素性能要求驾驶员年龄青年(16-18)~老年(80)功能正常性别男、女功能正常身材AF05~AM95功能正常肤色Fitzpatrick皮肤类型1~6或其他分类功能正常眼睑孔径6mm~12mm功能正常
类别噪声变量范围/元素性能要求遮挡照明白天(100000lux)~夜晚(1lux)*功能正常眼镜透光率>70%的透明太阳镜**,包括厚框太阳镜。功能正常透光率<15%的太阳镜**如果不起作用,需通知面部毛发短胡须(长度<20mm)功能正常长胡须(长度>150mm)功能正常手放在方向盘上一只手放在12点钟的方向盘上如果不起作用,需通知面部遮挡口罩功能正常帽子如果不起作用,需通知长发刘海遮住眼睛如果不起作用,需通知睫毛妆浓密的睫毛妆如果不起作用,需通知
*参考CA协议中的照明测量方法,在车辆外部测量(车顶位置)。 **指相机工作的波长内的光 (太阳镜的透射率应与传感器使用的光相关)。
“如果系统不起作用,需通知”意味着当DSM性能受损到系统不起作用或不激活的程度时,驾驶员将在遮挡出现后的十秒钟内收到视觉和/或听觉提示的通知。
关于系统不起作用的听觉信息可以在每个旅程中只显示一次。只要系统不起作用,视觉信息应永久或每10分钟显示一次。
类别驾驶员行为性能要求驾驶员行为吃不适用说话功能正常笑不适用唱歌不适用吸烟/电子烟不适用抓挠/揉眼睛不适用打喷嚏不适用
联合国在2024年6月的WP.29的第193届会议上,建立了“关于驾驶员疲芳和分心警告系统的非正式工作组”IWG-DDADWS(Informal Working Group on Driver Drowsiness and Distraction Warning Systems),工作组将基于1341和2590建立DMS的联合国标准和全球技术法规GTRs,目标是25年10月完成00版本的制定。
二、测试方法分析
2.1 真人测试方案
真人测试员经过训练,在试验过程中通过规定驾驶任务完成指定动作,记录系统对于真人实际反应的响应情况。
真人测试存在问题分析:
➢ 主观性强:当前主要采用真人测试,测试结果高度依赖测试人员的状态和主观感受。例如,不同测试人员对疲劳或注意力分散的判断标准可能不同,导致结果不一致。
➢ 可复现性差:真人测试受多种因素影响,如测试人员的情绪、身体状况、测试环境等,难以保证每次测试条件完全相同,导致结果难以复现。
➢ 一致性审查困难:在后续两年一次的CoP(一致性)审查中,由于测试结果的主观性和不可复现性,容易出现分歧,影响法规的执行和产品的认证。
2.2 仿生机器人测试方案
GB/T 41797首次应用仿生机器人作为测试工具,利用仿生机器人高拟人化外观、动作,重复性完成闭眼、接打电话、抽烟等动作,并且通过精确地时间戳记录动作开始时间,得出明确的系统发出提示时间差。

仿生机器人测试优势:
➢ 客观性:假人模型可以模拟多种驾驶员状态(如疲劳、注意力分散等),其参数(如头部姿态、眼部动作等)可以通过程序精确控制,避免了真人测试的主观性。
➢ 可重复性:假人模型可以在相同的测试条件下多次重复测试,确保测试结果的一致性和可复现性。
➢ 安全性:在一些高风险测试场景(如极端疲劳或危险驾驶行为)中,使用假人模型可以避免真人测试的风险。
先说观点,小强作为一个成年人,不想做选择,“全都要”应该是最好的选择,仿生机器人确定客观性能指标,真人测试测试功能鲁棒性。
2.3 分析过程
真人测试的必要性:
➢ 主观体验:真人测试可以提供真实的驾驶体验和主观感受,这对于评估DMS系统在实际驾驶场景中的表现至关重要。
➢ 复杂场景适应性:真人驾驶员能够更好地应对复杂的驾驶环境和突发情况,测试DMS系统在各种复杂条件下的性能。
仿生机器人和真人结合使用的优势:➢ 综合评估:通过假人模型提供客观数据,结合真人测试的主观体验,可以更全面地评估DMS系统的性能。
➢ 提高可复现性:假人模型的使用可以为测试提供一个稳定的基准,即使在真人测试中出现波动,也可以通过假人模型的数据进行校准和对比。
➢ 增强一致性:在CoP一致性审查中,假人模型的客观数据可以作为重要参考,减少因主观判断导致的分歧。
三、小强建议
因此,小强建议:
3.1 开发和校准仿生机器人
开发高精度的假人模型,能够模拟多种驾驶员形态、状态和行为。对假人模型进行校准,确保其模拟结果与真人数据具有高度相关性。
GB/T 41797已发布3年,国内主要测试机构已具备高精度的仿生机器人测试能力,并且具备丰富的测试和应用经验,已具备应用土壤。据悉,仿生机器人现在已经可以全面应对车端“活体检测”要求,可以通过面部微表情、脉搏、呼吸、胸腔变化等方式应对车端“活体检测”需求。

3.2 制定测试标准
制定包含仿生机器人和真人测试的综合测试标准,明确测试流程和评估指标。确定假人模型和真人测试的权重分配,以平衡主观和客观数据的影响。
GB/T 41797附录中已写入仿生机器人应对DMS系统功能测试的测试设备指标要求,据悉汽标委已启动仿生机器人标准研究,并计划于近期启动覆盖多用途通用仿生机器人测试设备的标准制定。
3.3 数据融合与分析
开发数据融合算法,将仿生机器人记录的客观数据和真人测试的主观数据进行整合分析。
建立数据库,记录每次测试的结果,便于后续的统计分析和一致性审查。
3.4 行业合作与推广
建议汽车制造商、DMS供应商、测试机构和法规制定者共同参与,推动该测试方法的行业认可和应用。可以开展试点项目,验证该方法的有效性和可行性,逐步推广到更广泛的测试认证场景中。
相信通过采用仿生机器人测试设备与真人测试相结合的方式,可以有效解决当前DMS测试认证中存在的主观性强、可复现性差等问题,提高测试结果的准确性和一致性,更好地满足法规要求,保障道路安全。
来源:智驾小强













