前轮转向车辆的早期开发阶段可以应用线性二自由度模型,该模型到加速度达到0.4g时依然是有效的,进而可以确定重点的转向参数,如轴距、载荷以及侧偏刚度在前后桥上的分配。
01稳定性因子
根据车辆线性二自由度模型可得(参考公众号文章:车辆二自由度动力学模型建模及其离散化应用、车辆动力学与稳态转向特性分析),稳定性因子为
其中,m和L分别为车重和轴距,lf和lr分别为质心到前后轴的距离,Cf和Cr分别为前后轴侧偏刚度, 为前轴的有效侧偏刚度,其具有特殊的意义,是由前桥结构特性、转向系统、弹性系统的侧倾刚度和侧倾转向共同决定的,其近似计算表达式为
为前轴的有效侧偏刚度,其具有特殊的意义,是由前桥结构特性、转向系统、弹性系统的侧倾刚度和侧倾转向共同决定的,其近似计算表达式为
 (1)
(1)
其中,r为轮胎总拖距,Cs为从下至上的转向系统总刚度,代表了转向系统刚度对前轴侧偏刚度的降低作用。因为转向系统刚度是由转向管柱的扭转刚度和拉杆、悬架的扭转刚度串联形成,因此,满足如下关系式
 (2)
(2)
其中,CR为转向横拉杆和弹性悬架的总体扭转刚度,该值会影响传递到车轮上的转向力矩和转向角;CT为转向管柱的扭转刚度;is是转向传动比,As是转向助力系数,可参考公众号文章:方向盘力矩计算分析。由(2)可得,转向系统刚度受刚度较低部件的限制,此时可以通过提高转向传动比和转向助力系数来提高转向系统刚度,相当于使转向扭杆变硬。
根据(1)和(2),轮胎拖距、前轴侧偏刚度以及“从下至上”的转向弹性的作用就很清楚了,车辆转向特性会降低前轴的有效侧偏刚度,而对后轴侧偏刚度的影响则可以忽略不计。
02稳态横摆角速度增益车辆对于方向盘转角不应该反应剧烈,也不应该反应迟缓。常用横摆角速度增益来表达这个车辆反应:
其中,L是车辆轴距。可见,减小转向传动比is和轴距L,都会让车辆变得更灵活。
现代车辆的横摆角速度增益的理想值一般设定为:当车速为80km/h时,横摆角速度增益为0.3左右。当选定横摆增益Gw后,进而可以确定所希望的固有转向特性在中间位置的转向传动比为
其中,计算车速选择为v0=80km/h,可以获得初步的转向传动比。
03方向盘力矩-侧向加速度增益车辆在速度较低时产生静态回正力矩,在高速时产生动态回正力矩。回正力矩在方向盘上产生的增量对于转向感受具有特别重要的意义,即转向手感,它不能太大也不能太小。
参考公众号文章:方向盘力矩计算分析,稳态的方向盘力矩-侧向加速度增益可以按照下面的公式计算:
其中,理想的转向助力系数和侧向加速度呈线性关系,可以表示为:

联合可以得出方向盘力矩与侧向加速度的关系为:
其中,DA为梯度系数,KA为缓增系数。以DA=0.38,KA=0.12为例,方向盘力矩与侧向加速度的关系如下图所示。其在零位的理想梯度值为2~3Nm(m/s^2),此外,还需考虑方向盘和转向管柱上大约0.1~0.5Nm的摩擦力矩。
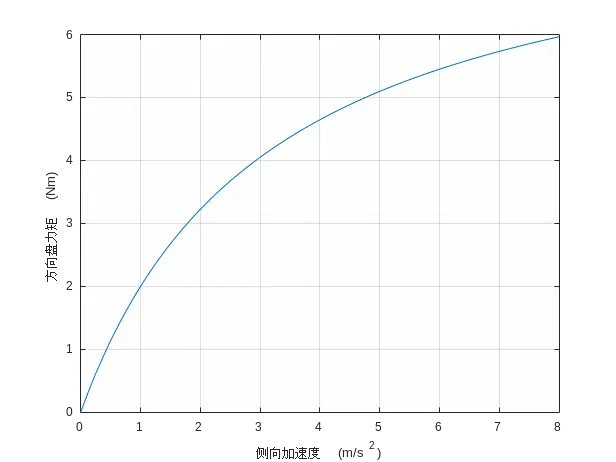
图1 方向盘力矩与侧向加速度的稳态响应曲线
来源:智能运载装备研究所













